









源码下载地址
项目介绍
安装方式
将MATLAB的当前工作文件夹切换到 RobotStudio 文件夹。
在命令行窗口中执行
addpath common
startup_rvc
双击RobotStudio.m, 点击执行开始执行。
Installation introduction:
Change the Matlab working space to the "RobotStudio";
Command the following command lines:
addpath common
startup_rvc
Double click the RobotStudio.m file to execute.
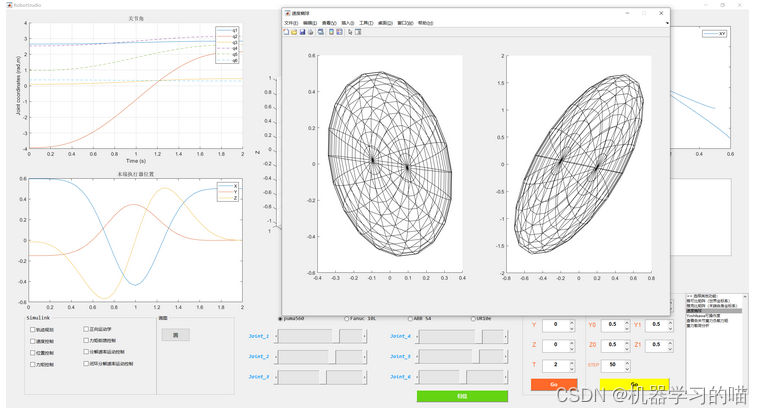
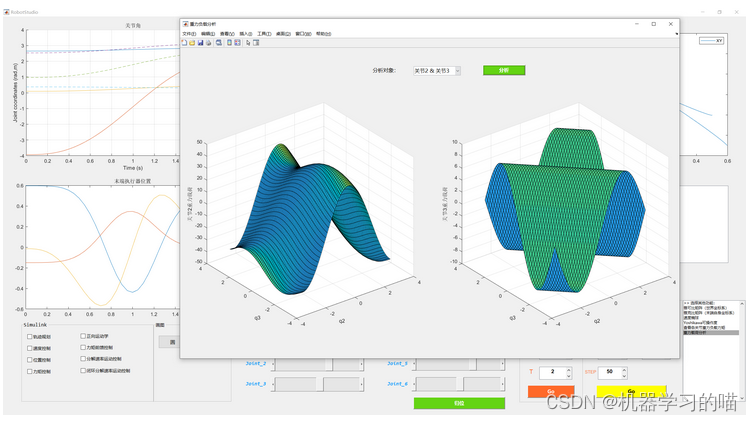
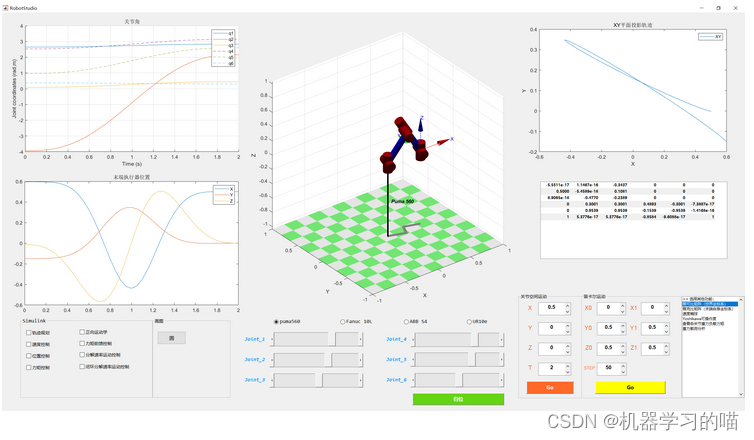
界面预览
项目备注
1、该资源内项目代码都经过测试运行成功,功能ok的情况下才上传的,请放心下载使用!
2、本项目适合计算机相关专业(如计科、人工智能、通信工程、自动化、电子信息等)的在校学生、老师或者企业员工下载学习,也适合小白学习进阶,当然也可作为毕设项目、课程设计、作业、项目初期立项演示等。
3、如果基础还行,也可在此代码基础上进行修改,以实现其他功能,也可用于毕设、课设、作业等。
下载后请首先打开README.md文件(如有),仅供学习参考, 切勿用于商业用途。
















 942
942











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











