








3.13
现有两幅图像a和b, 它们的灰度等级都分布在全部0~255之间.
(1) 如果我们不断的从图像a中减去b, 最终将得到什么结果.
(2) 如果交换两幅图像是否会得到不同的结果.
解答
(1)
因为两幅图像灰度分布在全部0~255之间, 并且我们假设两幅图像是不相关的, 那么a-b的结果将分布在-255~255之间, 所以每次减法操作可以表示为下式:
a(n+1) = [a(n)-b+255]/2
如果随着n趋于无穷, a(n)趋于一个稳定的图像A, 那么
A = (A-b+255)/2
所以A = 255-b, 最终得到的是图像b的负像.
(2)
不同, 最终得到的是a的负像.
3.14
图像相减经常在工业中用来检测产品组装时缺少的部件. 方法是保存一幅正确组装的产品的”完美”图像, 然后在其他相同产品的图像中减去这个图像. 理想情况下, 如果产品正确组装, 得到的差应该是0. 如果缺失了某个部件, 则与”完美图像”的差分图像在相应位置不为0. 在实际中, 为了实现这个方法我们应该考虑那些条件.
解答
(原作者参考答案)
用g(x, y)表示完美图像, f(x, y)表示实际操作中得到的图像. 通过减法来实现差别检测是基于简单的计算差值d(x, y)=g(x, y)-f(x, y). 差值图像可以通过两种方法实现差别检测. 第一种是用逐个象素的分析. 在这种情况下, 如果所有差值图像中的象素落在区间[Tmin, Tmax]中, 则我们认为f(x, y)足够接近完美图像, Tmin<0, Tmax>0. 通常这两个值的绝对值大小一样, 即[-T, T]. 第二种方法是将所有象素差值的绝对值相加, 和某个阈值S比较. 这是一种很粗略的检测, 所以我们重点关注第一种方法.
有三个因素需要我们控制: 1. 合适的配准(registration), 2. 可控的光照, 3. 噪声水平. 第一个是比较可以进行的基本条件. 两幅图像就算完全一样, 如果互相之间存在偏移, 那么比较的结果也没有意义. 通常特殊的标记会被标注在产品上用于机器对齐或图像处理时对齐.
可控的照明很明显是很重要的, 因为光照的改变会强烈的影响差分图像的值. 通常和光照控制联合使用的方法是根据实际条件的灰度拉伸. 例如, 产品上存在一小块颜色严格控制的区域, 整个图像上的灰度都根据这个区域的颜色和它应该具有的颜色来进行修改.
最后, 差值图像里的噪声需要足够小, 才不会影响比较结果. 好的信号强度对减小噪声的影响大有帮助. 另一种办法是通过图像处理的办法(例如图像平滑)去噪.
很明显, 上面说到的每个方面都有多种不同的方法. 例如, 我们可以在检查的形式上有比逐个象素比较更智能的办法. 一种常使用的方法是将完美图像分割成不同区域, 再根据每个区域的内容不同进行多种不同的测试.
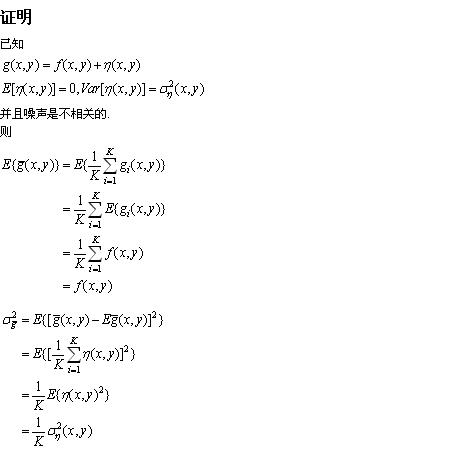
3.15
证明式(3.4-4)和(3.4-5)















 624
624











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









