







相信查看本文的读者手头应该有一台Mikrotik的路由产品,本文中出现的RouterOS是指笔者拥有的一台家庭版路由器。
非Routeros玩家可以忽略本文。
下图就是笔者正在使用的一个Routeros路由器。

我们在给Routeros升级时有时会出现升级失败的现象,或者想恢复一下设备的出厂设置,那么恢复RouterOS的方法就是先按住Reset键,然后打开电源,等USR灯闪烁时再松开Reset键,等几分钟后就重置成功了。

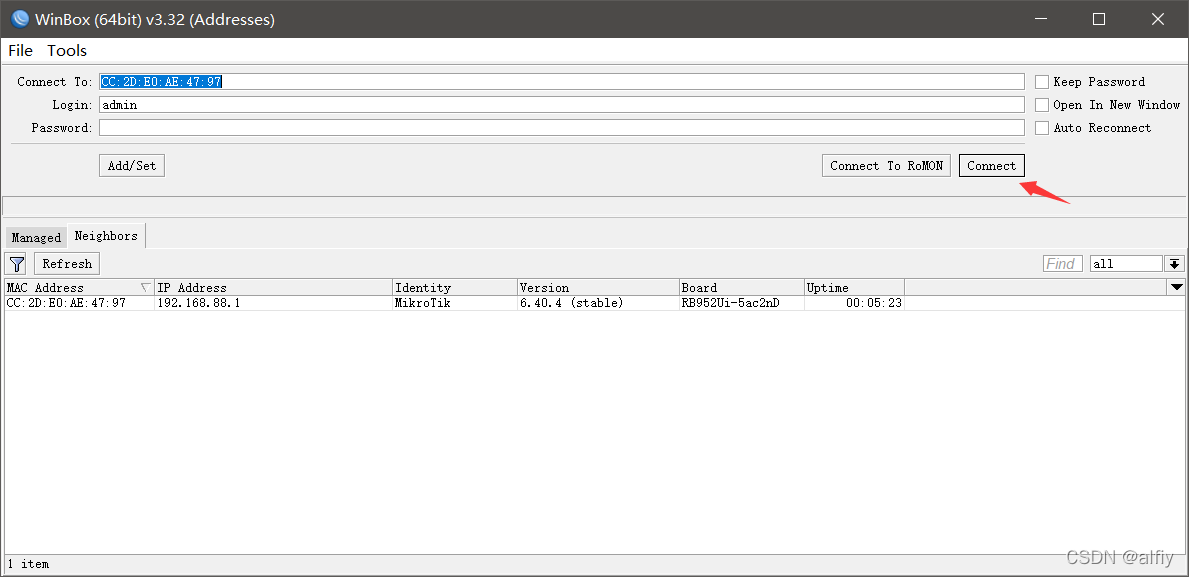
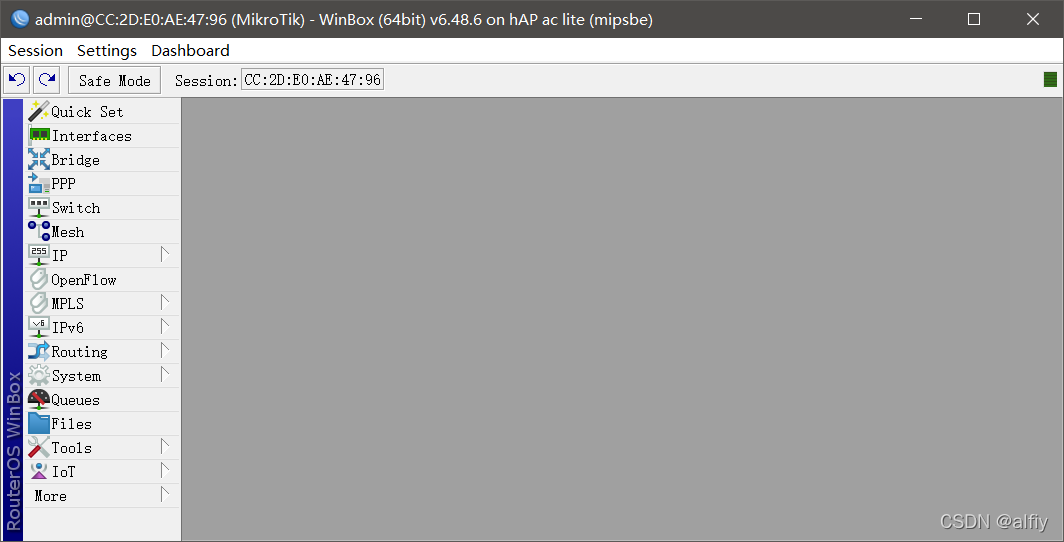
将配置电脑的IP地址设置成自动获取,通过网线连接到RouterOS的非’Internet’口,打开winbox如果出现下图,说明已经重置成功了。默认用户名是admin,默认MM是空
通过上述的操作,能够解决大部分的升级失败的问题,可是总有意外,笔者就遇到了,在一次升级失败后设置怎么都无法重置,连接网线后设置上的指示灯也不亮,真的变砖了。
后来查阅了官方的文档后,使用netinstall,又重新安装了固件,路由器才起死回生了。
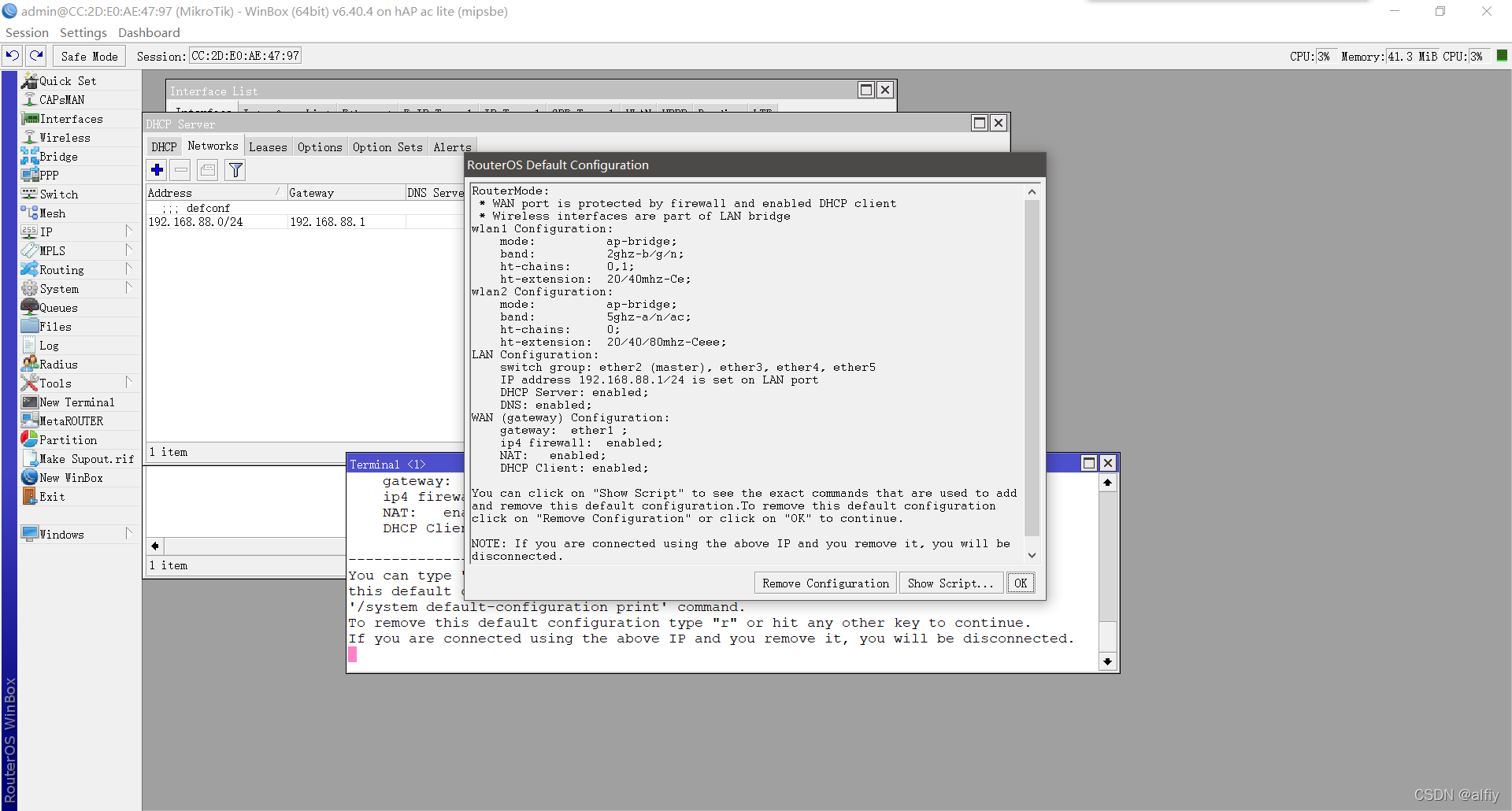
📓 注意当前的V6.40.4升级到6.48.6或者6.49.2,7.1.1后无线不好用了,建议想使用这款路由器的用户谨慎升级。
使用netinstall重置RouterOS
1.首先去官网(或者我的资源中)下载netinstall
2.下载你所想要升级或降级的固件。
本文使用all_packages-mipsbe-6.48.6.zip作示例。
3.将netinstall,和6.48.6固件解压。
4.进入netinstall目录,双击netinstall.exe打开netinstall软件。
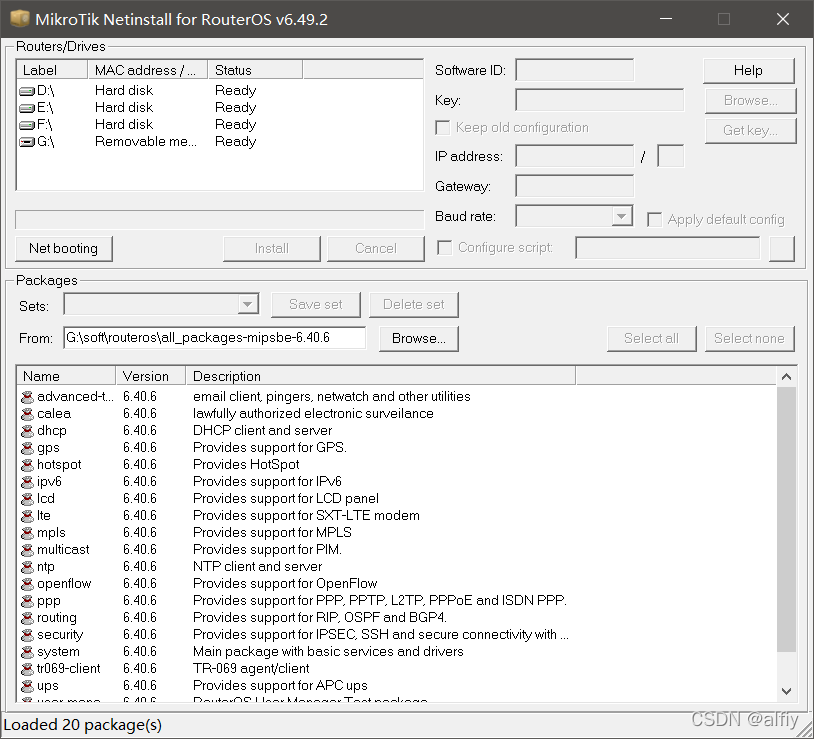
5.将本机的IP地址设置成如下图所示。

6.使用网线连接电脑与路由器的Ineter口。
7.按下Reset键,并连接路由器电源,仔细观察netinstall的软件界面直到出现设备的型号后再松开Reset键。
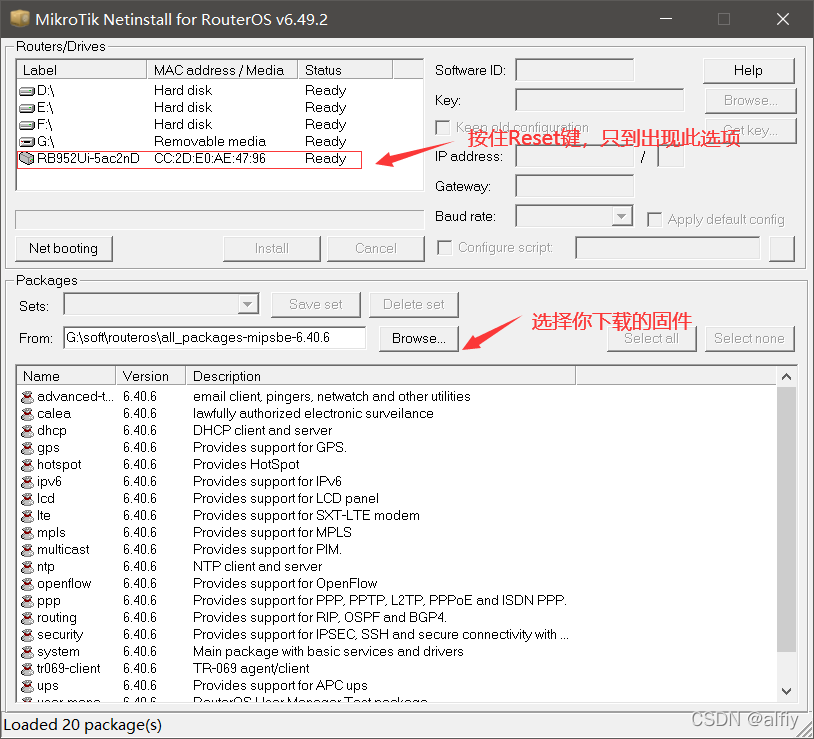
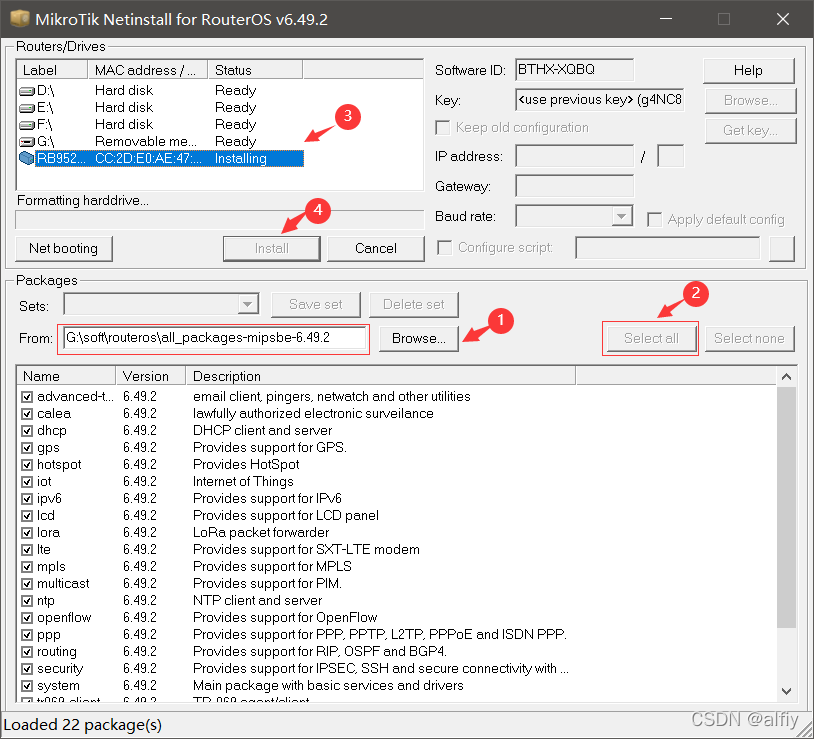
📓 在重启设备的时候,如果没有出现你的RouterOS的型号话,不要着急,多尝试几次。注意是加电的同时按住Reset键不放开,同时注意网线接在Internet口上。
🇵🇸 如果你的电脑有多个网卡,或者装有虚拟机的话,注意将除用来和routeros连接的网口外都禁用掉,不然netinstall识别不出routeros.
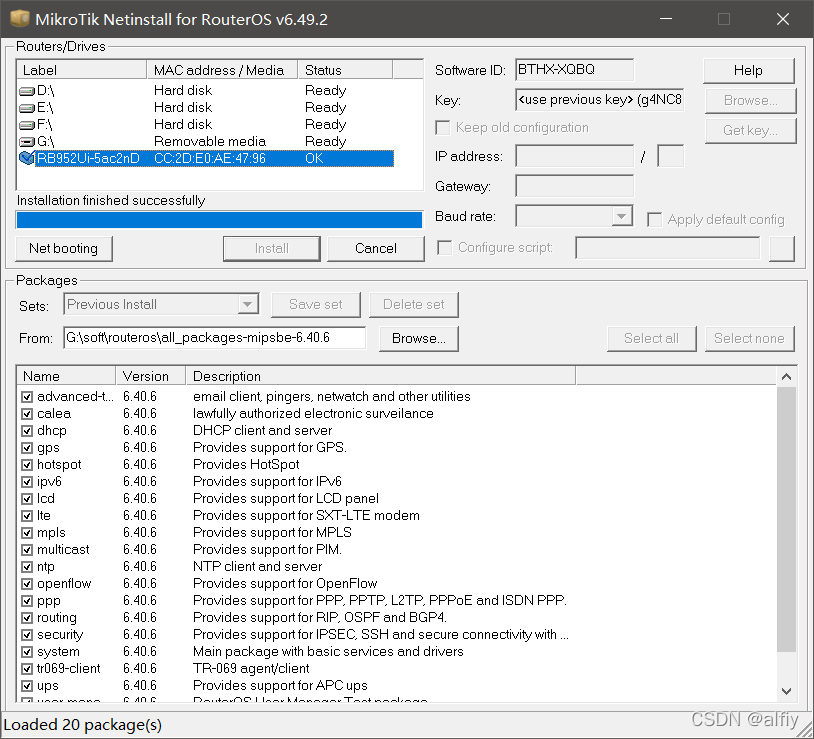
如果出现上图,说明固件安装成功了。
使用winbox登录看看吧。
欢迎留言、点赞、关注。


















 6076
6076

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











