






虚拟路面VPG(Virtual Proving Ground)现在正被广泛应用于汽车的疲劳耐久分析中,相较于传统的道路载荷谱数据采集的疲劳计算方法,虚拟路面VPG技术可以极大地节省载荷谱的获取时间并降低测试成本。
本文将给大家介绍汽车悬挂系统中的控制臂在Altair MotionView 的虚拟路面模块下的疲劳仿真流程。
整车疲劳耐久开发中的虚拟路面技术需要用到轮胎测试及建模和路面数字化模型建模等步骤,其中轮胎建模需要针对轮胎的力学特性建立对应的多体动力学模型,路面数字化建模则是通过三维路面扫描设备对路面进行扫描从而获取道路表面的点云数据,最后通过处理生成 3D 数字路面;
MotionView 中则包含了虚拟试验场VPG所需完整的路面建模(Road Tools)模块和轮胎建模(Auto Tires)模块;路面建模模块(Road Tools)中包含了三款适用于结构耐久分析用的3D路面:曲线规则格栅路(Curved Regular Grid,CRG格式),规则格栅路(Regular Grid Road,RGR格式),3D样条路面(3D Spline Road,RDF格式),三种路面建模方式如下图所示:
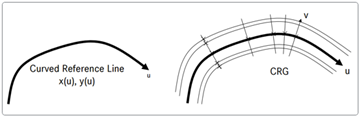
CRG曲线规则格栅路面
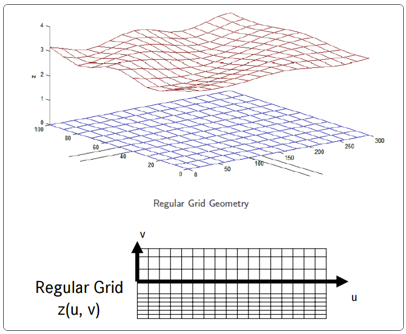
RGR规则格栅路面
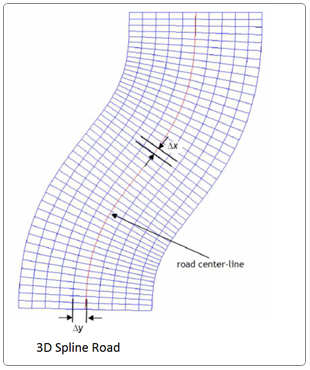
3D 样条路面
轮胎建模(Auto Tires)模块目前可以支持多款轮胎模型,从应用类型来讲其包含动力学分析轮胎,NVH舒适性分析轮胎,疲劳耐久分析轮胎,车辆软土分析轮胎;与此同时,该模块不仅支持 Altair 平台下的轮胎模型,同样还支持其他软件的轮胎模型,详细如下表所示:
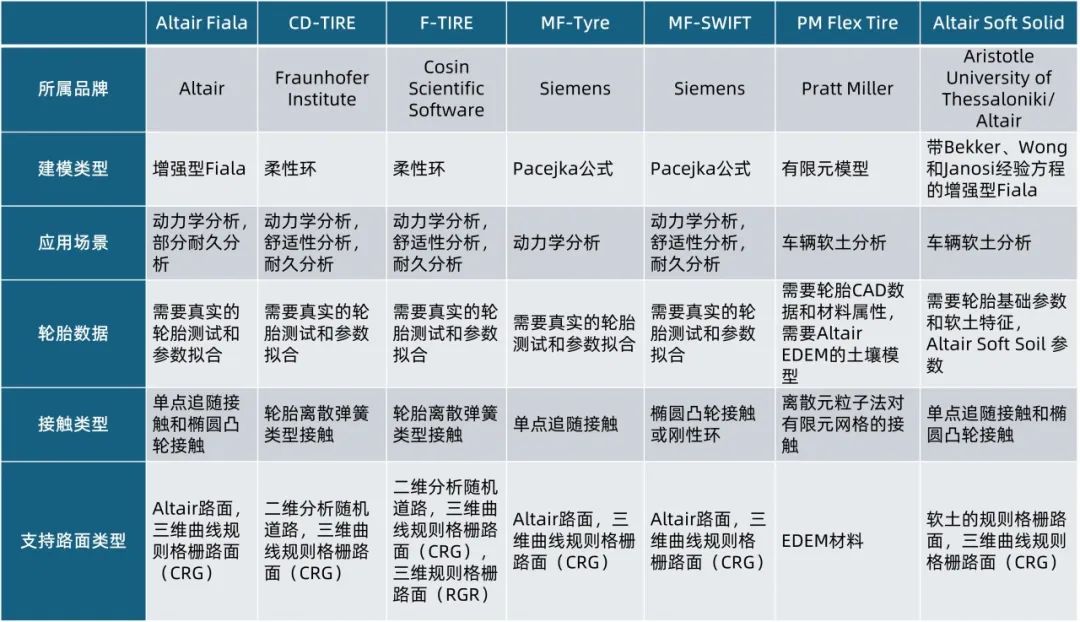
以上是路面和轮胎的建模介绍,本文将采用 Altair 自带的三维曲线格栅路面(CRG)和耐久分析轮胎Fiala-Tire;
根据此需求按照下表配置多体动力学整车模型:

使用 Assemble Wizard 建模导向工具进行整车配置,通过Auto Tire进行轮胎选型,在tire property中选择轮胎文件“fiala_ tire_ with_ cam_ contact. tpf”,如下图所示:
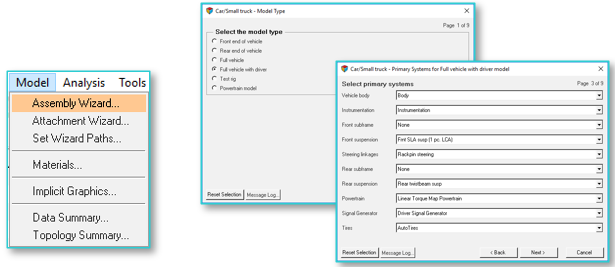
Assemble Wizard整车建模导向

Auto Tire属性配置
使用路面建模工具Road Tools配置路面文件“Belgian_ Blocks_ Road. crg”,即采用“比利时”类型的三维曲线格栅路面,Road Tools 创建的路面描述文件的表征,它可以被用来在 MotionSolve 和 HyperView 中可视化道路曲面形状;最后创建完成的多体动力学整车模型及路面模型如下图所示:
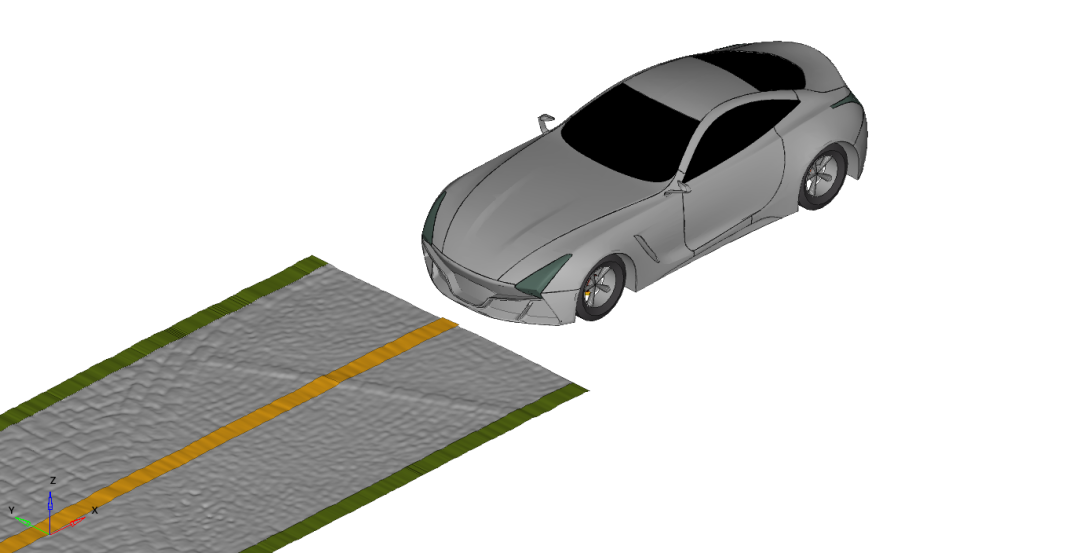
整车带路面的多体模型
在建立完成的模型基础上添加前悬架系统下制臂的柔性体文件,该柔性体文件可以在MotionView或OptiStruct中生成,文件以h3d格式保存,里面包含了下控制臂的模态信息,其前三阶模态如下图所示:
1st mode 157.88Hz
2nd mode 227.13Hz
3rd mode 271.49Hz
在下控制臂的 Body 中进行柔性体文件的替换,并更新运动副硬点的位置;最后通过 Add Events 创建路面事件,在 “RoadCourseDrive” 的 “Road Parameters” 中选择“比利时”路面的CRG文件,并设置车速、仿真时间、输出频次等信息,这里按照默认设置,车速5000毫米/秒,仿真时间15秒。
在计算完成整车动力学瞬态分析后,输出前悬挂下控制臂BODY上接附点上的力和力矩以及模态参与因子,由于生成该柔性体时提取的模态阶数为34阶,且前六阶为自由模态,因此输出的模态参与因子mrf文件中包含了28条曲线(除去了前六阶自由模态),如下图所示:
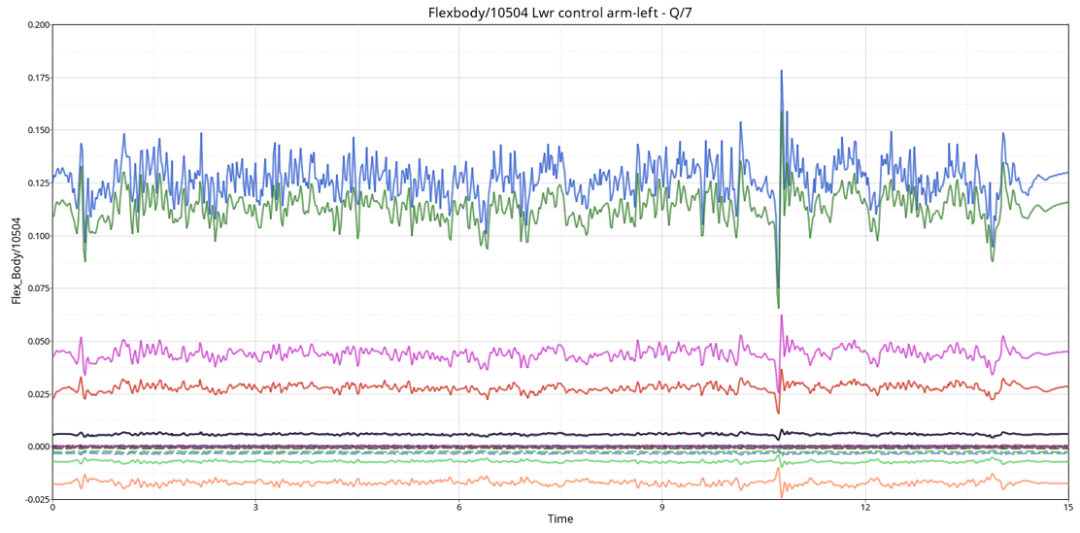
前悬下控制臂柔性体模态参与因子
下控制臂BODY接附点的力及力矩载荷谱信息如下图所示:
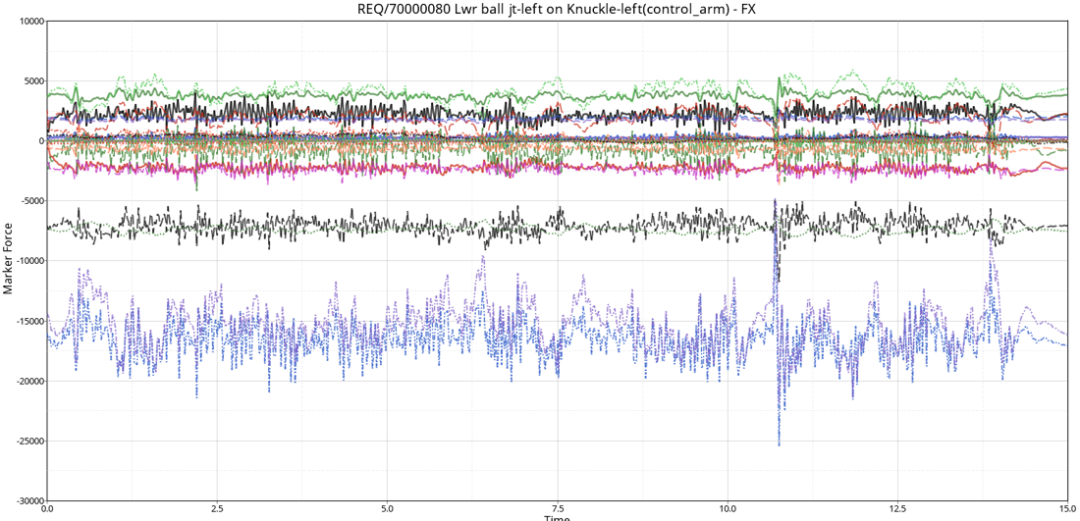
前悬下控制臂接附点载荷时间曲线
控制臂总共包含了五个运动副接附点,其球铰运动副和螺旋弹簧处的载荷传递分别只有三个自由度,因此输出的总载荷时间历程曲线为24条,对应的载荷通道也为24;
根据有限元的分析类型,车身及零部件的疲劳可以分为准静态疲劳和瞬态疲劳,此处将分别介绍基于HyperLife的准静态疲劳分析和瞬态疲劳分析,其中获取的mrf文件将作为模态参与因子提供给“Modal Superposition”模态叠加进行疲劳计算,而24通道的载荷谱曲线将被提供给“Time series”时域信号模块进行准静态疲劳计算,具体设置如下:
01、基于 HyperLife 的准静态疲劳
在获取到载荷谱后,还需要在 OptiStruct 中创建控制硬点处的单位力静态分析工况,其工况数量及载荷方向需要和24通道的载荷谱一一对应,计算输出应力信息并以h3d格式保存结果文件,在 HyperLife 中导入该结果文件,选取SN疲劳分析模块,设置为多轴分析模式,危险截面扫描设置20个,张开损伤模式选取GOODMAN,剪切损伤模式选取 FINDLEY,Type of Loading 选取 Time Series 时域信号法,如下图所示:
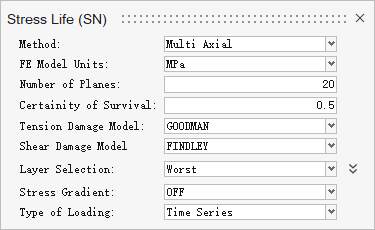
准静态疲劳分析设置
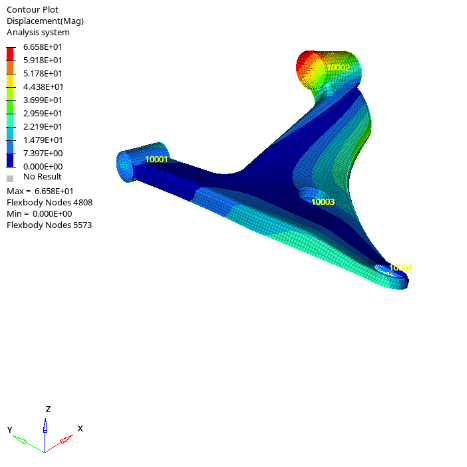
最后选取材料并设置载荷事件,将载荷循环设置1000次,HyperLife在经过损伤统计后的计算结果如下:
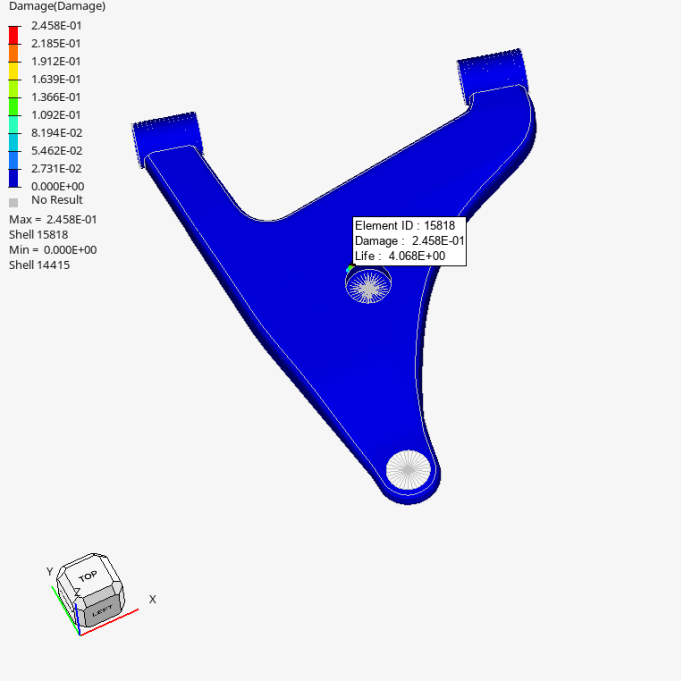
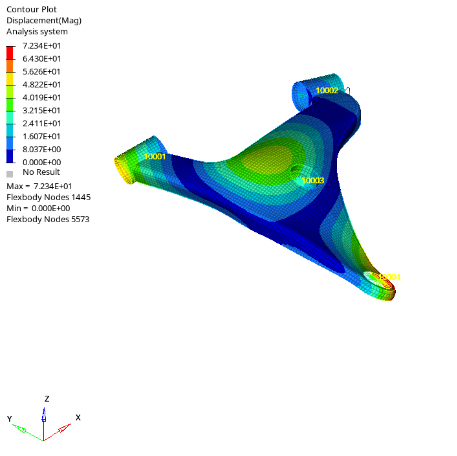
准静态法疲劳分析结果
02、基于 HyperLife 的模态叠加疲劳
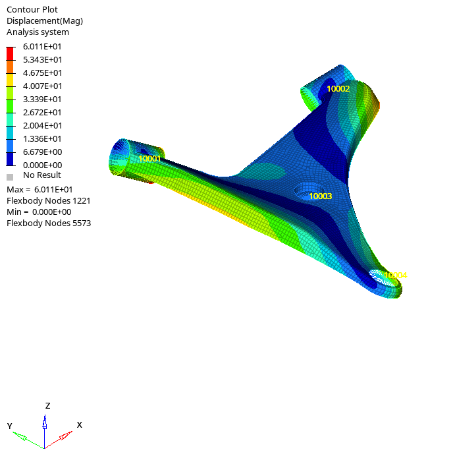
在 HyperLife 中导入下控制臂的柔性体文件,同样选取SN模块,其他设置与准静态疲劳方法一致,最后在Type of Loading选取Modal Superposition模态叠加即可;最后在 Load Map 中选取模态参与因子mrf文件与柔性体h3d中的模态阶数进行匹配生成事件,该事件循环1000次,最后计算完成结果如下:

模态叠加法分析结果
总 结
采用 MotionView 的虚拟路面模块进行车辆多体动力学及疲劳分析,其仿真周期大幅降低,能够便于快速进行产品的优化迭代;基于准静态疲劳和模态疲劳分析的控制臂最大损伤分别为 0.25 和 0.17,结果比较接近,但若零部件或子系统的固有频率不高的情况下,其模态叠加疲劳分析更为准确。
关于 Altair RapidMiner
Altair RapidMiner 数据分析与人工智能平台,是数据分析领域中最早实现将自动化数据科学、文本分析、自动特征工程和深度学习等多种功能同时集成的企业级一站式数据科学平台,帮助用户解决从数据清洗、准备、数据科学建模到模型管理和部署的全流程需求,同时支持数据和流数据的实时分析可视化,适用于从学术研究到企业级应用的广泛场景。
欲了解更多信息,欢迎关注公众号:Altair 澳汰尔
















 392
392











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









