






%This program complished the process of 2D Eulerian advection with method
%of allocating memory temporarily.
clear all;clf;
Nt = 100;
output_interval = 1;
% BASIC NODES
Lx = 1000000;
Ly = 1500000;
x_midd = Lx/2;
y_midd = Ly/2;
Nx = 51;
Ny = 31;
Nx1 = Nx+1;
Ny1 = Ny+1;
dx = Lx / (Nx-1);
dy = Ly / (Ny-1);
% Basic E-nodes.
x = 0:dx:Lx;
y = 0:dy:Ly;
g_y = 10;
% PARAMETERS
kw = 10;%W/(m*K)
denw = 3300;%Kg/m^3
Cpw = 1100;%J/(Kg*K)
ks = 3;%W/(m*K)
dens = 3200;%Kg/m^3
Cps = 1000;%J/(Kg*K)
bt = 1000;%K,background temperature
wt = 1300;%K,wave temperature
% L-MARKERS
num_per_cell = 4;
Nx_marker = (Nx-1)*num_per_cell;
Ny_marker = (Ny-1)*num_per_cell;
marknum=Nx_marker*Ny_marker;
x_m_step = Lx/Nx_marker;
y_m_step = Ly/Ny_marker;
% Marker points.
xm=zeros(1,marknum); % Horizontal coordinates, m
ym=zeros(1,marknum);
rhom=zeros(1,marknum); % K, kg/m^3 kt
etam=zeros(1,marknum); % den*Cp hct
tdm = zeros(1,marknum); % K/den/Cp td
Tm = zeros(1,marknum); % temperature
% INITIALIZE K,Den*Cp in the L-markers.
m = 1;
for jm=1:1:Nx_marker
for im=1:1:Ny_marker
% Define marker coordinates
xm(m)=x_m_step/2+(jm-1)*x_m_step+(rand-0.5)*x_m_step;
ym(m)=y_m_step/2+(im-1)*y_m_step+(rand-0.5)*y_m_step;
% Marker properties
if ( xm(m)<=x_midd+100000 && xm(m)>=x_midd-100000 && ym(m)<=y_midd+150000 && ym(m)>=y_midd-150000)
rhom(m)=kw; % K wave
etam(m)=denw*Cpw; % den*Cp wave
Tm(m) = wt;
else
rhom(m)=ks; % K surround
etam(m)=dens*Cps; % den*Cp surround
Tm(m) = bt;
end
% Update marker counter
m=m+1;
end
end
% Define matrix
hct = zeros(Ny,Nx);
kht = zeros(Ny,Nx);
T = zeros(Ny,Nx);
td = zeros(Ny,Nx);
b = zeros(Nx*Ny, 1);
coe = zeros(Nx*Ny, Nx*Ny);
vx = zeros(Ny,Nx);
vy = zeros(Ny,Nx);
for j = 1:Nx
for i = 1:Ny
% Constant velocity
vx(i,j) = 1e-9;
vy(i,j) = 1e-9;
end
end
% DEFINE dt
% 2.7548e-06(suround),9.3750e-07(wave)
dtexp = min(dx,dy)^2/(3*td(2,2));
if(vx(1,1)~=0)
dtexp=min(dtexp,abs(dx/vx(1,1))); % Limitation for horizontal advection timestep
end
if(vy(1,1)~=0)
dtexp=min(dtexp,abs(dy/vy(1,1))); % Limitation for vertical advection timestep
end
dt = 0.7*dtexp;
for t = 1:Nt
% Indispensable
% Eq.8.18
w_m_x_node = zeros(Ny,Nx);
den_w_m = zeros(Ny,Nx);
vis_w_m = zeros(Ny,Nx);
% Eq.10.12
T_w_m = zeros(Ny,Nx);
w_m_t = zeros(Ny,Nx);
% Searching the coordinate of upper-left node of every L-marker.
for m=1:1:marknum
% Define i,j indexes for the upper left BASIC NODE(Nx*Ny)
j=fix((xm(m)-x(1))/dx)+1;
i=fix((ym(m)-y(1))/dy)+1;
if(j<1)
j=1;
elseif(j>Nx-1)
j=Nx-1;
end
if(i<1)
i=1;
elseif(i>Ny-1)
i=Ny-1;
end
% Compute distances between marker and upper-left node.
dis_x = xm(m)-x(j);
dis_y = ym(m)-y(i);
wtmij = (1-dis_x/dx)*(1-dis_y/dy);
wtmi1j = (1-dis_x/dx)*(dis_y/dy);
wtmij1 = (dis_x/dx)*(1-dis_y/dy);
wtmi1j1 = (dis_x/dx)*(dis_y/dy);
% Sum of (K/Den*Cp)*(weight) and sum of weight.
w_m_x_node(i,j) = w_m_x_node(i,j) + wtmij; % denominator% numerator
den_w_m(i,j) = den_w_m(i,j) + rhom(m).*wtmij;% K
vis_w_m(i,j) = vis_w_m(i,j) + etam(m).*wtmij;% Den*Cp
T_w_m(i,j) = T_w_m(i,j) + Tm(m).*etam(m)*wtmij;% T
w_m_t(i,j) = w_m_t(i,j) + etam(m)*wtmij;
w_m_x_node(i+1,j) = w_m_x_node(i+1,j) + wtmi1j;
den_w_m(i+1,j) = den_w_m(i+1,j) + rhom(m).*wtmi1j;
vis_w_m(i+1,j) = vis_w_m(i+1,j) + etam(m).*wtmi1j;
T_w_m(i+1,j) = T_w_m(i+1,j) + Tm(m).*wtmi1j*etam(m);% T
w_m_t(i+1,j) = w_m_t(i+1,j) + etam(m)*wtmi1j;
w_m_x_node(i,j+1) = w_m_x_node(i,j+1) + wtmij1;
den_w_m(i,j+1) = den_w_m(i,j+1) + rhom(m).*wtmij1;
vis_w_m(i,j+1) = vis_w_m(i,j+1) + etam(m).*wtmij1;
T_w_m(i,j+1) = T_w_m(i,j+1) + Tm(m).*wtmij1*etam(m);% T
w_m_t(i,j+1) = w_m_t(i,j+1) + etam(m)*wtmij1;
w_m_x_node(i+1,j+1) = w_m_x_node(i+1,j+1) + wtmi1j1;
den_w_m(i+1,j+1) = den_w_m(i+1,j+1) + rhom(m).*wtmi1j1;
vis_w_m(i+1,j+1) = vis_w_m(i+1,j+1) + etam(m).*wtmi1j1;
T_w_m(i+1,j+1) = T_w_m(i+1,j+1) + Tm(m).*wtmi1j1*etam(m);% T
w_m_t(i+1,j+1) = w_m_t(i+1,j+1) + etam(m)*wtmi1j1;
end
% Computing the value of K and Den*Cp and T of E-nodes.
for j = 1:Nx
for i = 1:Ny
if(w_m_x_node(i,j)>0)
kht(i,j) = den_w_m(i,j)/w_m_x_node(i,j);%K
hct(i,j) = vis_w_m(i,j)/w_m_x_node(i,j);%Den*Cp
end
td(i,j) = kht(i,j)/hct(i,j);%K/Den/Cp
if(w_m_t(i,j)>0)
T(i,j) = T_w_m(i,j)/w_m_t(i,j);%T
end
end
end
% Apply the boundary conditions to T at every t+dt.
% Constant temperature boundary
% T = constant
T(1,:) = 1000;
T(Ny,:) = 1000;
T(:,1) = 1000;
T(:,Nx) = 1000;
% Insulting boundary condition
% T1(boudnary) = T2(internal)
% T(1,2:Nx-1) = T(2,2:Nx-1);
% T(Ny,2:Nx-1) = T(Ny,2:Nx-1);
% T(:,1) = T(:,2);
% T(:,Nx) = T(:,Nx-1);
khtdt = kht;
hctdt = hct;
% Change k and den*Cp at internal nodes with upwind difference
for j = 2:Nx-1
for i = 2:Ny-1
khtdt(i,j) = dt*( -vx(i,j)*( kht(i,j)-kht(i,j-1) )/dx -vy(i,j)*( kht(i,j)-kht(i-1,j) )/dy ) +kht(i,j) ;
hctdt(i,j) = dt*( -vx(i,j)*( hct(i,j)-hct(i,j-1) )/dx -vy(i,j)*( hct(i,j)-hct(i-1,j) )/dy ) +hct(i,j) ;
end
end
kht = khtdt;
hct = hctdt;
% Constant temperature boundary condition.
% Tbc = constant = 1000
% up and down
for j = 1:Nx
i = 1;
k = (j-1)*Ny + i;
coe(k, k) = 1;
b(k, 1) = 1000;
i = Ny;
k = (j-1)*Ny + i;
coe(k, k) = 1;
b(k, 1) = 1000;
end
% left and right
for i = 1:Ny
j = 1;
k = (j-1)*Ny + i;
coe(k, k) = 1;
b(k, 1) = 1000;
j = Nx;
k = (j-1)*Ny + i;
coe(k, k) = 1;
b(k, 1) = 1000;
end
% coefficients of interval points
for j = 2:Nx-1
for i = 2:Ny-1
k = (j-1)*Ny + i; % k is the index
if vx(i,j)>0
dtdx = (T(i,j)-T(i,j-1))/dx;
elseif vx(i,j)<0
dtdx = (T(i,j+1)-T(i,j))/dx;
end
if vy(i,j)>0
dtdy = (T(i,j)-T(i-1,j))/dy;
elseif vy(i,j)<0
dtdy = (T(i+1,j)-T(i,j))/dy;
end
coe(k, k) = (khtdt(i,j)+khtdt(i,j+1))/(2.*dx.^2)+(khtdt(i,j-1)+khtdt(i,j))/(2.*dx.^2)...
+(khtdt(i,j)+khtdt(i+1,j))/(2.*dy.^2)+(khtdt(i-1,j)+khtdt(i,j))/(2.*dy.^2)...
+hctdt(i,j)/dt; % middle T3
coe(k, k-1) = -(khtdt(i-1,j)+khtdt(i,j))/(2.*dy.^2); % up T2
coe(k, k+1) = -(khtdt(i,j)+khtdt(i+1,j))/(2.*dy.^2); % down T4
coe(k, k-Ny) = -(khtdt(i,j-1)+khtdt(i,j))/(2.*dx.^2); % left T1
coe(k, k+Ny) = -(khtdt(i,j)+khtdt(i,j+1))/(2.*dx.^2); % right T5
b(k, 1) = T(i,j)*hctdt(i,j)/dt - hctdt(i,j)*(vx(i,j)*dtdx+vy(i,j)*dtdy);
end
end
%direct method:right martix is divided by coe martix on the left
u = coe \ b;
%transform vector to grids
%grids has Ny rows and Nx columns
U = reshape(u, Ny, Nx);
T = U;
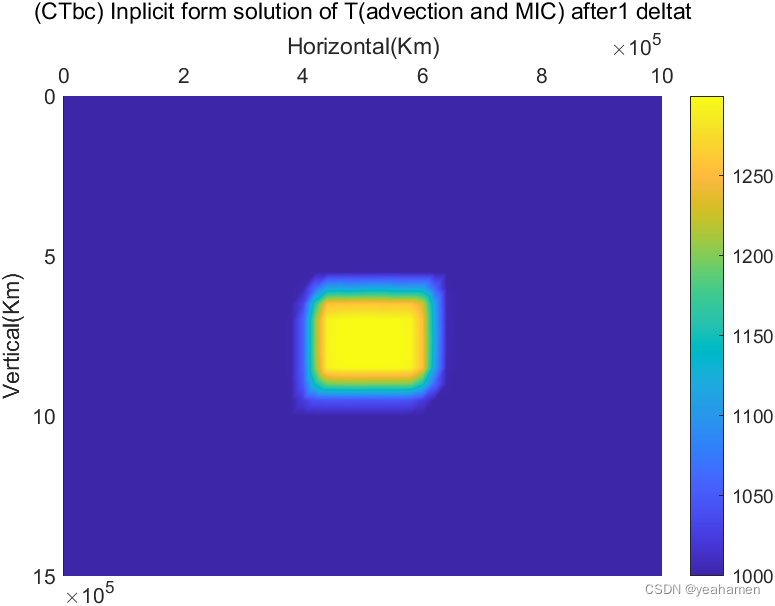
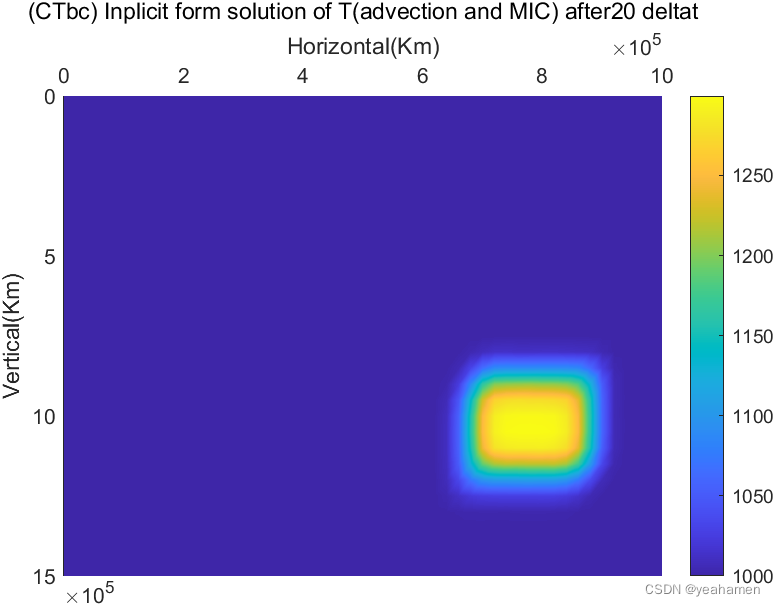
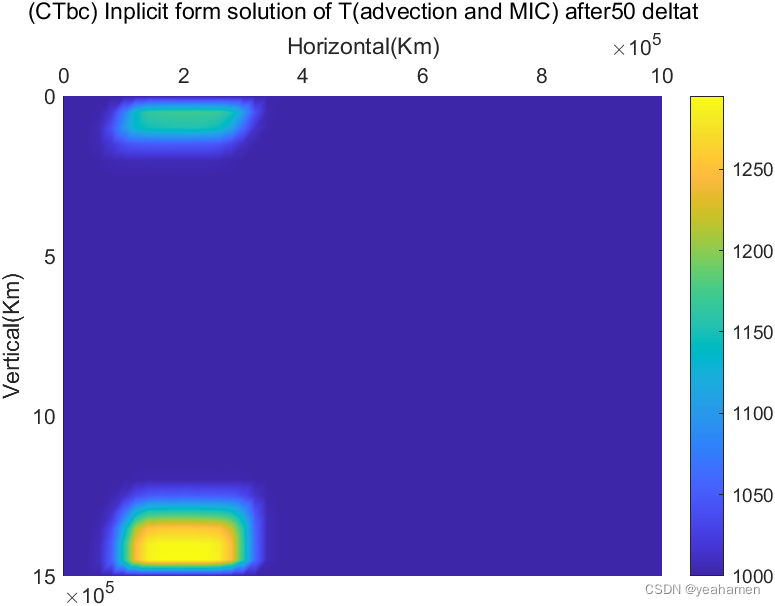
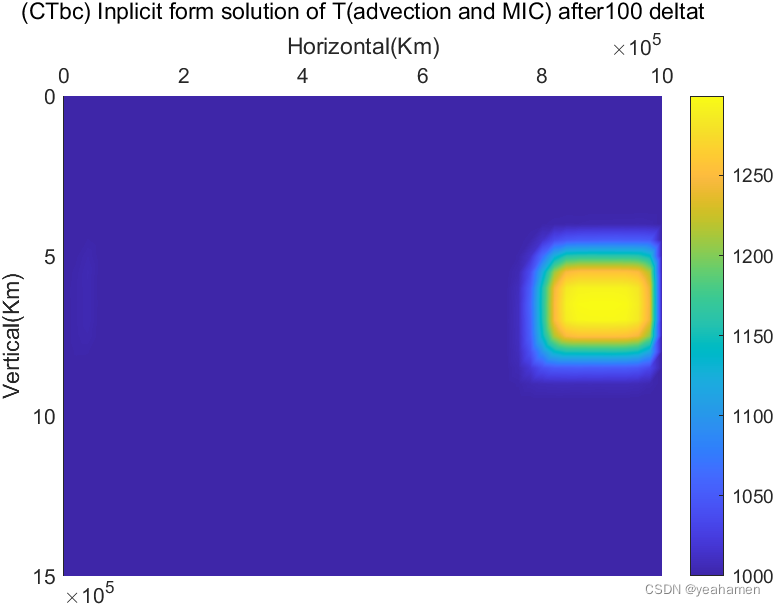
figure(1);
pcolor(x,y,T);colorbar;
xlabel('Horizontal(Km)');
ylabel('Vertical(Km)');
zlabel('Gravitational potential');
title(['(CTbc) Inplicit form solution of T(advection) after',num2str(t),' deltat'])
set(gca,'xaxislocation','top');
set (gca,'YDir','reverse')
shading interp;
pause(0.01);
% Marker transport
for m = 1:marknum
vxm = 1e-9;
vym = 1e-9;
xm(m) = xm(m)+vxm*dt;
ym(m) = ym(m)+vym*dt;
if (xm(m) > Lx)
xm(m) = xm(m) - Lx;
elseif(xm(m) < 0)
xm(m) = xm(m) + Lx;
end
if (ym(m) > Ly)
ym(m) = ym(m) - Ly;
elseif(ym(m) < 0)
ym(m) = ym(m) + Ly;
end
end
if(t==1)
% Interpolate T from E-nodes to L-markers.
for m = 1:marknum
% Interpolate T to BASIC NODES(Nx*Ny)
% Define i,j indexes for the upper left node
j=fix((xm(m)-x(1))/dx)+1;
i=fix((ym(m)-y(1))/dy)+1;
if(j<1)
j=1;
elseif(j>Nx-1)
j=Nx-1;
end
if(i<1)
i=1;
elseif(i>Ny-1)
i=Ny-1;
end
% Compute distances
dis_x=xm(m)-x(j);
dis_y=ym(m)-y(i);
% Compute weights
wtmij=(1-dis_x/dx)*(1-dis_y/dy);
wtmi1j=(1-dis_x/dx)*(dis_y/dy);
wtmij1=(dis_x/dx)*(1-dis_y/dy);
wtmi1j1=(dis_x/dx)*(dis_y/dy);
% Compute Tm of next t+dt
Tm(m)=T(i,j)*wtmij + T(i+1,j)*wtmi1j + T(i,j+1)*wtmij1 + T(i+1,j+1)*wtmi1j1;
end
end
end















 180
180











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









