






本文英文版原文地址:https://opensource.googleblog.com/2016/10/introducing-cartographer.html
Cartographer是谷歌开源的支持ROS的2D和3D SLAM库.项目地址:https://github.com/googlecartographer/cartographer.
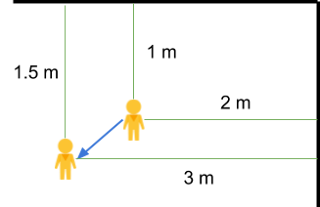
SLAM算法融合多种传感器数据(雷达,IMU,摄像头)用于实时的计算传感器位置以及传感器周围的环境地图.比如,想象一下你工作的办公室所在楼层的平面图:
1.拿着一个激光测距仪,站在房间的中央,在纸上画一个X.
2.测量你站立的位置到任意一面墙的距离.
3.在纸上画出墙的位置,然后写下X到墙的位置.
4.重复步骤3,画出其他墙的位置.
5.换一个位置.
6.如果墙静止不动,可以测量出新的位置到两面墙的距离.
SLAM自动化平台基本部分,比如自动驾驶汽车,仓储自动叉车,自动化的真空清洁器,无人机.
Cartographer通过一个在学术界和工业常见的大范围的传感器配置实时构建全局一致的地图.下面的视频是一个Caretographer的实时回环闭合的示例:https://youtu.be/-EQAJOoRqEQ.
更详细的关于Cartographer的2D算法的描述,参见:https://research.google.com/pubs/pub45466.html.
得益于ROS集成和支持其他外部贡献者,Cartographer能够在部分ROS支持的机器人平台上使用.
1.Toyota HSR:https://github.com/googlecartographer/cartographer_toyota_hsr
2.TurtleBots:https://github.com/googlecartographer/cartographer_turtlebot
3.PR2:https://google-cartographer-ros.readthedocs.io/en/latest/
4.Revo LDS:https://google-cartographer-ros.readthedocs.io/en/latest/
在谷歌,Cartographer使得从博物馆和交通枢纽到著名建筑地图构建的大范围应用变得可能.
我们认识到高质量的数据集对于学术团体的价值.这也就是为什么,感谢与the Deutsches Museum(世界上最大的科技博物馆)的合作,我们同时也发布了收集了三年的雷达和惯导数据,这些数据包括在Cartographer的开发和测试期间使用的2D和3D地图包.
下面是一个3D SLAM视频:
https://youtu.be/DM0dpHLhtX0
我们关注于作为一种技术的高级的自主的SLAM.目前,Cartographer重点关注LIDAR SLAM.通过持续的开发和社区贡献,我们希望添加更过传感器的支持和机器人平台作为新的特性,比如在整个生命周期的地图构建和已知地图的定位.
本文英文版作者:Damon Kohler, Wolfgang Hess, and Holger Rapp, Google Engineering















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









