







背景
出于两个原因,离线程序在现场可能需要微调:
1)现场误差:来源于设备误差、产品的位置误差、和产品的加工误差。对于首件,离线程序到现场会有差异。
2)批次误差。对于已经调试好的连续生产件,不同批次的产品也可能有细微差异。
这种微调可能是坐标系的调整,也可能是切割轨迹的调整。在反复的调整过程中,客户希望设备端有一个可视化的界面,方便调整,并可以快速地上传和下发程序。因此,在线编辑模块应运而生。
解决方案
基于AnyCAD .NET SDK可以快速搭建机器人仿真和模拟环境,通过自定义扩展,可以导入机器人编程指令,导入后可以编辑、重新保存。
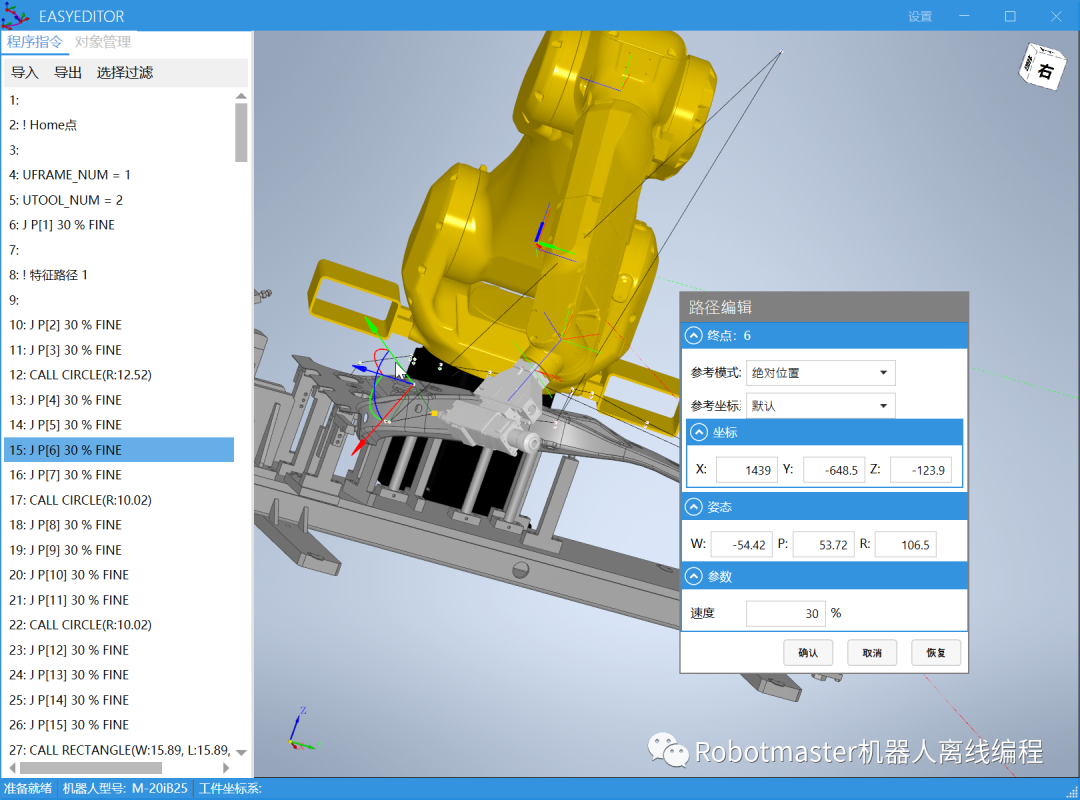
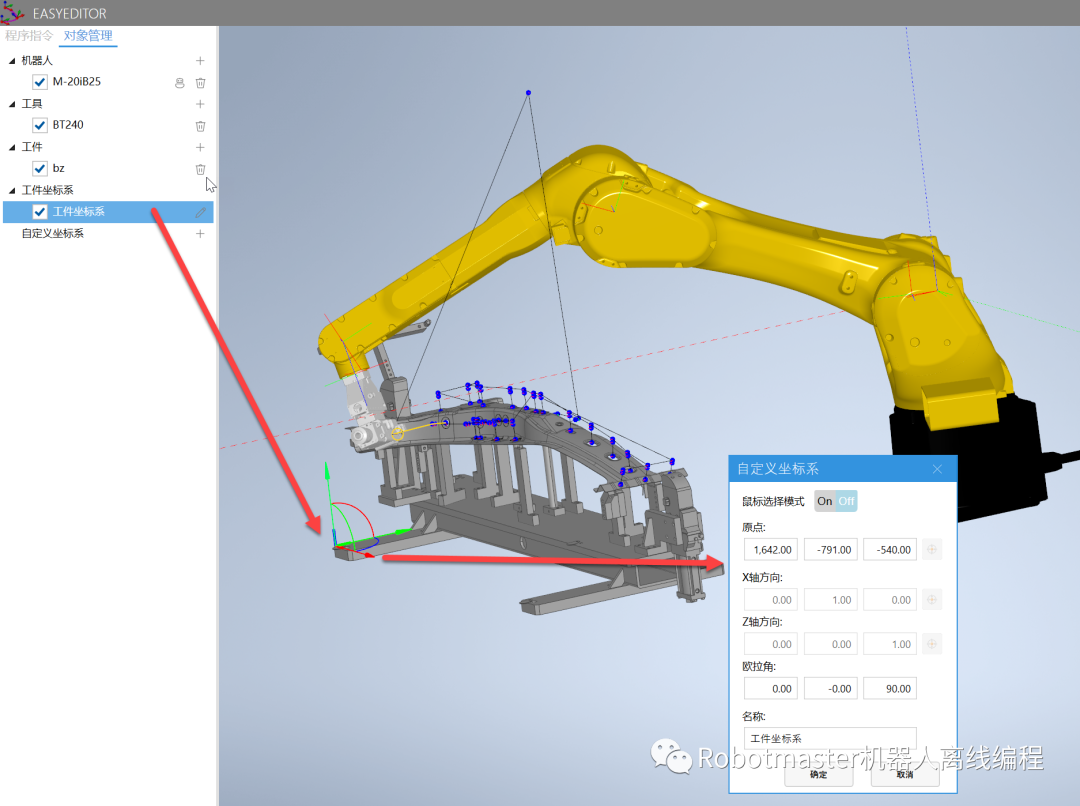
编辑
在线编辑模块支持坐标系调整,单点编辑和多点编辑,也可以对特征图形的参数进行修改。同时,在线编辑还支持碰撞检测和机器人仿真。
示教
编辑后的轨迹,可以直接同步给机器人执行。机器人端如果进行过其它调整(如示教),还可以将机器人程序上传到在线编辑模块里进行比对和调试。
总结
作为面向工业软件的三维图形平台,AnyCAD支持CAD/CAE/CAM等各类工业软件应用,可用于建筑设计/算量、机械设计/仿真/加工、有限元前后处理、机器人模拟、逆向工程等若干领域。
关于本案例的详细信息,欢迎访问用户 公众号详细了解















 3439
3439











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









