






电机是在IoT领域经常用到的一个重要模块,大到使用在农业中的水泵、电动大棚,小到机器人、甚至镜头中的微型马达,都需要使用到电机,可以说电机是为设备提供机械动力的重要来源之一。而步进电机在非常多的场合也有着广泛的用途。通常情况下对运动控制有较高精度需求时就可以使用步进电机,初学来说常用的步进电机有42、57两种系列的步进电机。42电机的体积合适做一些小型的设备,它输出的扭矩较小,比较适合做小车的底盘驱动电机,小型3D打印机驱动电机,桌面机械臂的驱动电机等等。
相对于42步进电机,还有57步进电机,它的体积和质量有了较大的提升,当然其扭矩也有很大的提高。适用于做一些有负载需求的场景,比如小型的搬运机械臂驱动、特殊的滑台场景等。
STM32F407开发板+57步进驱动器
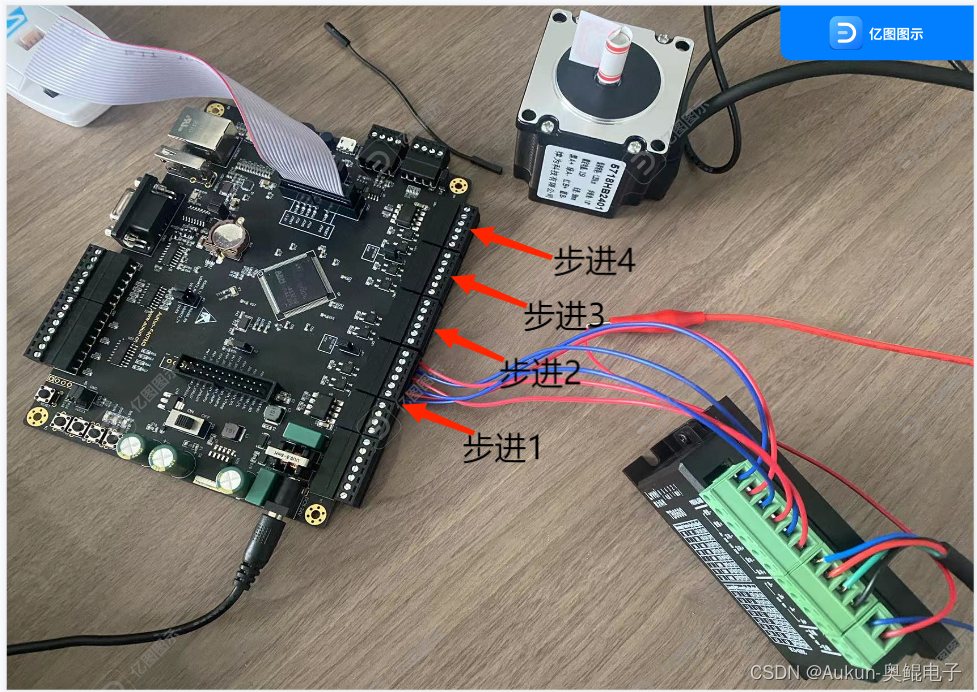
上图为设计的STM32的PWM控制4路步进电机(示意图)
步进设计原理图
电路设计用了8组光耦来控制通用接口输出(EN/DIR)光耦逻辑输出芯片 隔离电压(rms)芯片可以达到2500V(PUL)。(下图为设计图与TIM接口定义)

步进接线示意图
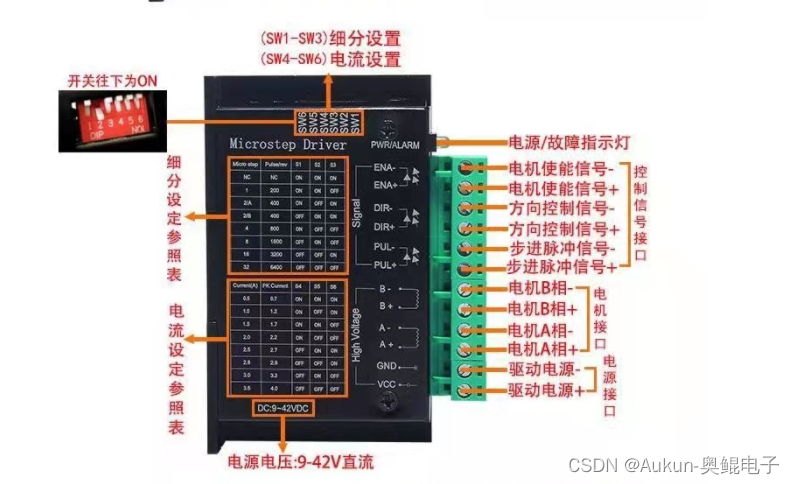
V+:连接电源正极(注意电压在9V~24之间)
GND:连接电源负极
A+:连接电机绕组A+相
A- : 连接电机绕组A-相
B+:连接电机绕组B+相
B- : 连接电机绕组B-相
CP+:脉冲信号输入正 ( PUL+ )(取决于共阴、共阳接法再来接线,共阴的话CP-接地,CP+接脉冲信号即定时器PWM输出)
CP-:脉冲信号输入负 ( PUL-)
DIR+:电机正、反转控制正(同样取决于共阴共阳接法)
DIR-:电机正、反转控制负
EN+:电机脱机控制正(可以不接)
EN-:电机脱机控制负
stm32控制步进电机

















 1646
1646











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











