







针对角点提取过程中出现的角点提取不准确的问题做了算法的修改。算法流程如下:
- 棋盘格的宽度和高度。
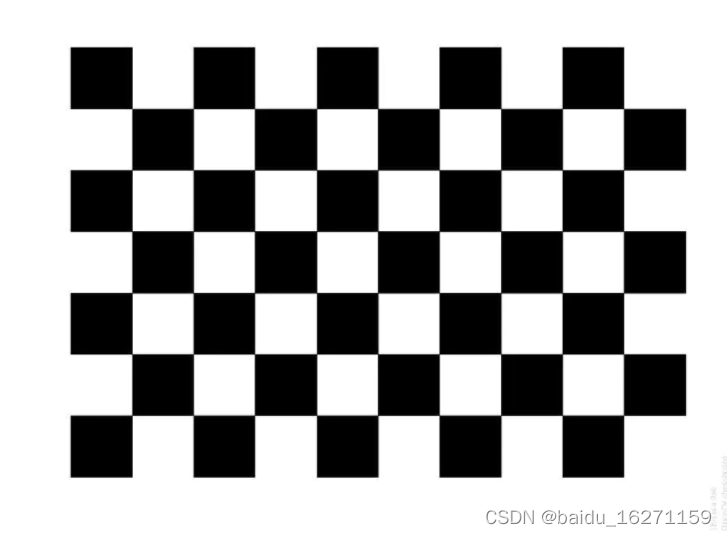
需要特别注意的是,这里的宽度和高度是指内部交叉点的个数,而不是方形格的个数。如下图所示的棋盘格,内部交叉点的宽度是9,高度是6。请务必填写正确,否则无法标定。
- 将获取的图像进行灰度转换,使用opencv函数cvtColor(frameR,GrayR,COLOR_BGR2GRAY);完成。
- 角点的提取,使用opencv函数findChessboardCorners()完成,该函数时像素级别的精度存在一定的误差,需要后面亚像素级别的优化。需要注意函数的最后一个参数Flags标志,各种操作标志,可以是0或者下面值的组合:
CV_CALIB_CB_ADAPTIVE_THRESH -使用自适应阈值(通过平均图像亮度计算得到)将图
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章

















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









