







首先我说下我移植的平台是在MTK上,模块是AK09911。
现在我们来看看首先移植指南针驱动需要在ProjectConfig.mk添加驱动
CUSTOM_HAL_MSENSORLIB=akm09911
CUSTOM_KERNEL_MAGNETOMETER = yes
#CUSTOM_KERNEL_MAGNETOMETER = akm09911 //都是可以这两种方法
static struct mag_hw cust_mag_hw = {
.i2c_num = 2,
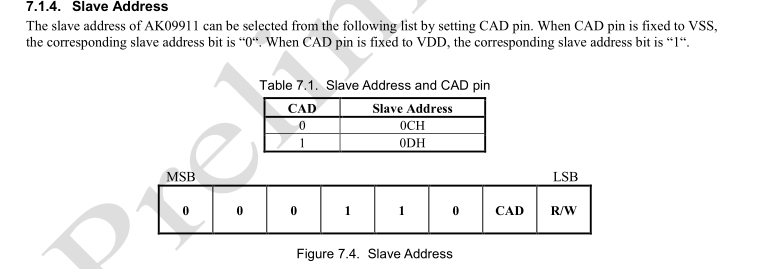
.i2c_addr = {0x0C,0,0,0}, //器件地址
// .i2c_addr = {0x1B,0,0,0},
// .direction = 6,
.direction = 7, //查看你摆的方位可以设置1-7
.power_id = MT65XX_POWER_NONE, /*!< LDO is not used */
.power_vol= VOL_DEFAULT, /*!< LDO is not used */
// .is_batch_supported = false,
};
struct mag_hw* get_cust_mag_hw(void)
{
return &cust_mag_hw;
}最后就是我们的驱动代码在.h文件中把器件地址修改为芯片器件地址,如果不知道自己i2c地址的查看datasheet
#define AKM09911_I2C_ADDRESS 0x0C //0x0c是我的器件地址
static const struct i2c_device_id akm09911_i2c_id[] = {{AKM09911_DEV_NAME,0},{}};
//static struct i2c_board_info __initdata i2c_akm09911={ I2C_BOARD_INFO("akm09911", (AKM09911_I2C_ADDRESS>>1))};
static struct i2c_board_info __initdata i2c_akm09911={ I2C_BOARD_INFO("akm09911", AKM09911_I2C_ADDRESS)};//切记这里如果右移了你的器件地址也需要同时扩大一倍。















 6745
6745

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









