








Automated 3-D Retinal Layer Segmentation From SD-OCT Images With Neurosensory Retinal Detachment
翻译:SD-OCT图像中具有神经感觉性视网膜脱离的自动3-D视网膜层分割
摘要
由于视网膜下液会导致严重的视力丧失,因此,神经感觉性视网膜脱离(NRD)是神经感觉视网膜与视网膜色素上皮(RPE)的分离。已知神经感觉视网膜的分离会改变拓扑结构以及视网膜层的强度连续性。 NRD的这种性质使受NRD影响的眼睛的层分割变得困难。在本文中,我们提出了一种全自动的三维(3D)方法,用于从光谱域光学相干断层扫描(SD-OCT)图像中分割视网膜层和NRD相关的视网膜下液。所提出的方法分为三个阶段,包括先验信息模型。 NRD相关的视网膜下液分割;和图层细分。使用图搜索和图切割技术分别分割视网膜层和与NRD相关的视网膜下液。为了减少基于图的优化的计算成本,引入了“划分和合并”方法。实验表明,在保持分割精度的同时,“分割并合并”方法大大降低了计算成本。我们的方法在诊断为NRD的20个SD-OCT多维数据集上进行了评估,并将结果与专家的手动分割结果进行了比较。层评估显示,整体绝对表面位置差异为6.34±2.6μm,与专家间差异为6.39±5.9μm相当。根据Dice系数评估了NRD相关的视网膜下液的分割结果,与两名专家相比,平均结果分别为90.78%和92.04%。
索引项 图切割,图优化,图搜索,神经感觉性视网膜脱离(NRD),视网膜层分割。
一,引言
中枢浆液性脉络膜视网膜病变(CSC)是中年男性个体的视力威胁疾病[1]。 CSC的主要特征是视网膜色素上皮(RPE)失代偿,导致神经感觉性视网膜脱离(NRD)[2]。 视网膜层的分割和与NRD相关的视网膜下液的边界对于医学评估以及视网膜的研究分析至关重要。
光谱域光学相干断层扫描(SD-OCT)是一种非侵入性成像方式,可提供具有高空间分辨率的视网膜结构体图像。 以黄斑为中心的SD-OCT图像提供了清晰的NRD结构,其边界清晰,将神经感觉视网膜与视网膜色素上皮分开(图4(A))。 尽管有其优势,SD-OCT仍产生相对较低的信噪比,这需要仔细选择分段技术。
已经提出了许多方法来从OCT图像中分割视网膜层[3] – [11]。 Dufour等。 [5]提出了一种基于自动图搜索的多表面分割方法来描绘五个视网膜层。他们使用软性和硬性平滑性约束来添加学习模型中的先验信息。平滑度约束通过规则化表面的形状和表面之间的距离,提高了分割的准确性并提高了对噪声的鲁棒性。从
视网膜时域光学相干断层扫描图像,Garvin等[6]使用3D图形搜索识别了六个表面。随着SD-OCT成像技术的创新,这项工作扩展到从SD-OCT图像分割七个表面[8]。为了增加平滑度约束的灵活性,以处理各层的形状变化,Garvin等人(2003年)提出。 [8]应用了平滑约束,该约束在整个表面上都不同。对于从正常眼睛进行的视网膜层分割,He等人[12]开发了一个级联的深度网络,该网络使用U-net生成概率图和回归网以了解各层的形状和拓扑。方等。 [26]使用图搜索从使用FCN生成的概率预测中划定了九个视网膜边界。爱荷华州参考算法[3]是一种自动算法,用于分割11个视网膜表面。该算法的实现是公开可用的,其结果与手动分割具有相当的准确性。请注意,根据定义,11个视网膜表面划定了10个视网膜层(图1(B))。
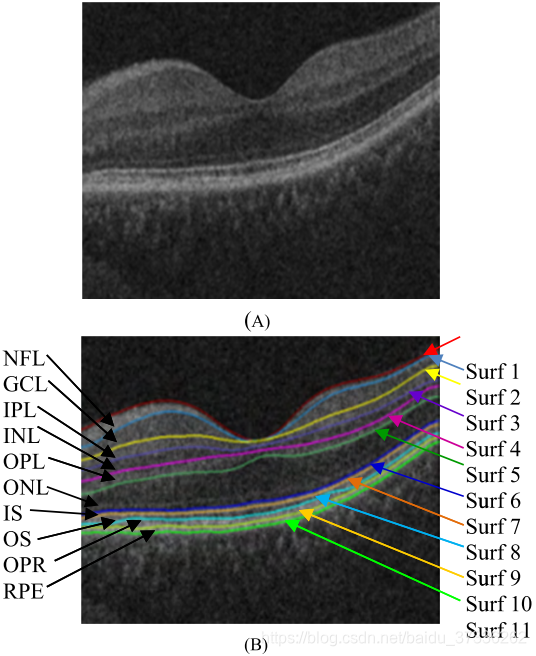
FIGURE 1. (A) B-scan sample from normal eyes of an SD-OCT image. (B) 11 surfaces (Surf) from The Iowa Reference Algorithms [3] overlaid on the B-scan. The 11 surfaces delineate ten retinal layers, namely, the Nerve Fiber Layer (NFL), the Ganglion Cell Layer (GCL), the Inner Plexiform Layer (IPL), the Inner Nuclear Layer (INL), the Outer Plexiform Layer (OPL), the Outer Nuclear Layer (ONL), the Inner Segment (IS), and the Outer Segment (OS), Outer Photoreceptor (OPR), Retinal Pigment Epithelium (RPE).
尽管它们在分割正常眼睛层和拓扑变形较少的疾病(例如玻璃疣)的层中是有效的,但[3] – [8],[10]和[11]中介绍的方法无法实现相同的性能当眼睛受到NRD等疾病的影响时。当存在NRD时,层的形态会发生很大变化,并且层强度值的连续性可能会高度中断。结果,视网膜层的分割是困难的。
为了分割与视网膜相关的液体异常,已经提出了一些参考文献[13]-[21]。提出了一种使用概率约束图搜索和图割的3D方法[17]。视网膜内和视网膜下液分割的分层依赖分层采样方法在[16]中提出。文献[18]提出了浆液性色素上皮脱离(PED)分割框架,该框架将AdaBoost算法与多尺度图搜索和形状受限图割相结合。 [13]中的一项最新研究报道了SD-OCT图像中NRD相关的视网膜下液分割方法,具有很高的准确性。
先前的一些工作已经解决了层和流体区域的分割。 Zhang等[20]集成了3D图形搜索和有监督的体素分类方法,分别从患有渗出性年龄相关性黄斑变性的眼睛中分割出视网膜外视网膜下和充液异常。 Antony等[22]提出了一种利用图论方法分割微囊性黄斑水肿和视网膜内表面的方法。 Novosel等人[15]提出了一种算法,该算法使用围绕表面的层的局部衰减系数对比来分割视网膜层之间的四个表面,并勾画出与流体相关的病理学的边界。 Shi等[19]开发了一种从SD-OCT图像中分割11个视网膜表面和PED体积的方法。将3D多尺度图形搜索应用于图层分割。最后两个连续表面之间的强度阈值和高度差用于检测PED。 Roy等人[23]使用完全卷积网络(FCN)为八个视网膜层和流体区域生成像素级标记。
然而,据我们所知,以前的工作并未解决从NRD受影响的眼睛的SD-OCT图像中对所有可分辨的视网膜层进行分割的问题。 分割所有明显的视网膜层和与NRD相关的视网膜下液的方法的提议对临床研究非常重要。 与以前的工作相比,我们的工作取得了以下创新成果:(1)提出了一种从正常眼中学习约束以分割11个视网膜表面以及来自NRD患眼的视网膜下液的新方法。 (2)引入了“划分和合并”方法,以减少基于图的优化的计算成本。 (3)引入了一种简便而有效的技术来从厚度图上定位中央凹区域。 (4)结合k-均值聚类和刚硬约束,估计了视网膜的中断和缺失层。
二。 方法
A.建议方法概述
所提出的方法包括三个阶段,包括先验信息模型。 NRD相关的视网膜下液分割和层分割。 图2示出了所提出的方法的流程图。 先验信息模型使用爱荷华州参考算法[3]从分割的正常眼睛层计算平滑度约束的均值和方差。 采用图切技术分割NRD相关的视网膜下液。 最后,在层分割阶段,使用图搜索方法对11个视网膜表面进行分割。 以下各节将解释每个阶段的详细信息。
B.先验信息模型
在此阶段,距离平滑度约束的均值和方差被计算为给定曲面和参考曲面之间的间隔。 距离约束的目的是限制目标表面相对于参考表面的搜索区域。 该约束条件是使用爱荷华州参考算法[3]从以中央凹为中心的正常眼睛的20个SD-OCT立方体中获悉的。 由于左眼和右眼的方向略有不同,因此从具有相似方向的眼睛中选取每只眼睛的训练数据集。 替代地,绕x轴反转将足以补偿左眼到右眼的方向差异,反之亦然。
C. NRD相关的流体分割
使用3D图形切割技术对NRD相关的视网膜下液进行分割。 图切技术通过整合区域和邻域信息,以大致均匀的强度值分割区域。 在本文中,我们将Boykov和Jolly [29]提出的交互式图割算法扩展为一种完全自动化的方法。 细节可以在[29]中找到,但是为了保持一致,在此我们总结了主要思想。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









