






 文章探讨了在数字孪生背景下,如何通过结合VR摄像机和激光雷达SLAM技术,创建彩色实景三维模型。NT98530多目VR摄像机方案能同步驱动4个sensor,保证色彩一致性,支持硬件级PTP协议实现与激光雷达的帧级同步,确保像素级的相关性,用于SLAM模型着色。此外,该方案还具有低功耗和多维防抖功能。
文章探讨了在数字孪生背景下,如何通过结合VR摄像机和激光雷达SLAM技术,创建彩色实景三维模型。NT98530多目VR摄像机方案能同步驱动4个sensor,保证色彩一致性,支持硬件级PTP协议实现与激光雷达的帧级同步,确保像素级的相关性,用于SLAM模型着色。此外,该方案还具有低功耗和多维防抖功能。
随着数字孪生发展,现实空间和虚拟空间之间的关联变得越来越重要了,传统的VR摄像机只能获取平面的图像,单纯的激光雷达slam又只能获取不可见的空间信息,VR和激光雷达slam之间的结合,可以获取彩色的实景三维空间模型,但是多传感器之间的结合,往往又有居多的壁垒,移动的激光雷达的扫描数据和移动的VR摄像机拍摄数据之间怎么去关联对应?有没有一种方案可以让VR摄像机准确的去给slam的模型着色呢?这对产品的设计框架就要求比较高了。基于NT98530来实现的多目VR摄像机方案可以有效的解决这个问题。先来看一下技术框架:
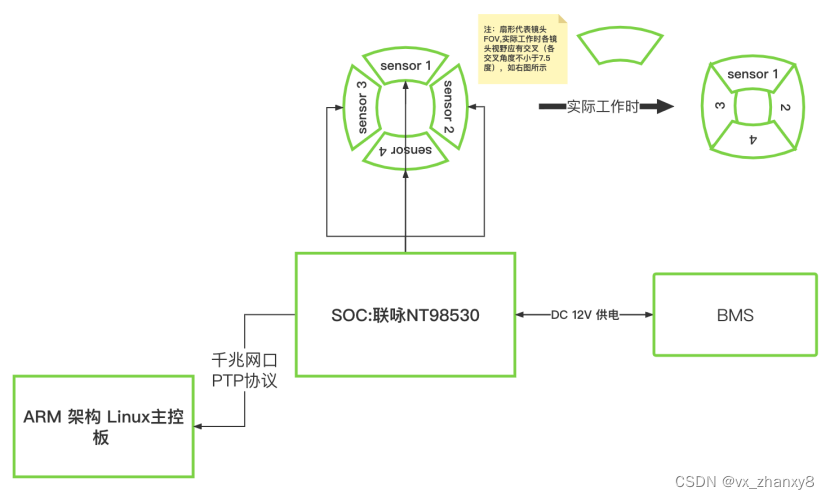
1、这个方案中NT98530可以同步驱动4个sensor,最高分辨率可以达到500万,保障拍摄的清晰度
2、4个sensor可以实现同步曝光,同步白平衡,让4个sensor的画面看起来是平滑均匀,颜色一致的。避免了4个sensor之间的亮度差和颜色差。
3、4个sensor可以实现一个gyro-sensor的多维防抖,可以避免手持或者车顶画面抖动。
4、这个方案可以支持硬件级PTP协议,可以保持与激光雷达之间的帧级同步,保障slam数据和摄像机之间的像素级相关,方便对slam三维数据进行实景着色。
除了以上的优点,这个方案的功耗低,搭配4个sensor的典型功耗只有4瓦,同时还有丰富的其他外设可以用来做其他应用


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









