






The first line of input is K, the number of test cases. Each test case starts with one line consisting of two integers, 1 <= A, B <= 100, giving the size of the warehouse in meters. A is the length in the EW-direction, and B in the NS-direction.
The second line contains two integers, 1 <= N, M <= 100, denoting the numbers of robots and instructions respectively.
Then follow N lines with two integers, 1 <= Xi <= A, 1 <= Yi <= B and one letter (N, S, E or W), giving the starting position and direction of each robot, in order from 1 through N. No two robots start at the same position.
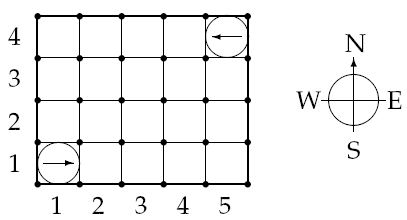
Figure 1: The starting positions of the robots in the sample warehouse
Finally there are M lines, giving the instructions in sequential order.
An instruction has the following format:
< robot #> < action> < repeat>
Where is one of
and 1 <= < repeat> <= 100 is the number of times the robot should perform this single move.
The second line contains two integers, 1 <= N, M <= 100, denoting the numbers of robots and instructions respectively.
Then follow N lines with two integers, 1 <= Xi <= A, 1 <= Yi <= B and one letter (N, S, E or W), giving the starting position and direction of each robot, in order from 1 through N. No two robots start at the same position.
Figure 1: The starting positions of the robots in the sample warehouse
Finally there are M lines, giving the instructions in sequential order.
An instruction has the following format:
< robot #> < action> < repeat>
Where is one of
- L: turn left 90 degrees,
- R: turn right 90 degrees, or
- F: move forward one meter,
and 1 <= < repeat> <= 100 is the number of times the robot should perform this single move.
Output
Output one line for each test case:
Only the first crash is to be reported.
- Robot i crashes into the wall, if robot i crashes into a wall. (A robot crashes into a wall if Xi = 0, Xi = A + 1, Yi = 0 or Yi = B + 1.)
- Robot i crashes into robot j, if robots i and j crash, and i is the moving robot.
- OK, if no crashing occurs.
Only the first crash is to be reported.
Sample Input
4 5 4 2 2 1 1 E 5 4 W 1 F 7 2 F 7 5 4 2 4 1 1 E 5 4 W 1 F 3 2 F 1 1 L 1 1 F 3 5 4 2 2 1 1 E 5 4 W 1 L 96 1 F 2 5 4 2 3 1 1 E 5 4 W 1 F 4 1 L 1 1 F 20
Sample Output
Robot 1 crashes into the wall Robot 1 crashes into robot 2 OK Robot 1 crashes into robot 2


//Memory Time //348K 16MS #include<iostream> using namespace std; int main(void) { int cases; int a,b; //A列数B行数 int n,m; //n : robot数, m : 指令数 int x,y; //robots坐标 char dire; //robots方向 int rob[101],rep[101]; //rob:编号,rep:指令重复次数 char act[101]; //act:行动指令 bool flag=false; int i,k; int post[101][101]; //记录robot初始方向 int num[101][101]; //记录robot的编号 int xx[101],yy[101]; //记录robot的编号 cin>>cases; while(cases--) { memset(post,-1,sizeof(post)); memset(num,0,sizeof(num)); memset(xx,0,sizeof(xx)); memset(yy,0,sizeof(yy)); cin>>a>>b; cin>>n>>m; /*Input the postion and direction of each robot*/ for(i=1;i<=n;i++) { cin>>y>>x>>dire; //使用cin函数时,空字符不会作为字符输入到char xx[i]=x; yy[i]=y; //编号记录(编号作为下标,通过编号反搜坐标) num[x][y]=i; //编号记录(坐标作为下标,通过坐标反搜编号) if(dire=='S') //方向记录(坐标作为下标,通过坐标反搜方向) post[x][y]=0; //0 or 360 【由于坐标系改变,注意上下颠倒,即N为南,S为北,但WE不变】 else if(dire=='E') post[x][y]=1; //90 else if(dire=='N') post[x][y]=2; //180 else if(dire=='W') post[x][y]=3; //270 } //用0~3代替是为了减少运算次数 /*Input < robot #> < action> < repeat>*/ for(k=1;k<=m;k++) cin>>rob[k]>>act[k]>>rep[k]; bool flag=false; int row,col; for(k=1;k<=m;k++) { row=xx[rob[k]]; col=yy[rob[k]]; if(act[k]=='L') //【由于坐标系改变,注意转向相反:L转右,R转左】 { rep[k]%=4; //角度每转4次(360度)回到原位 post[row][col] = ( post[row][col] + rep[k] ) % 4; } else if(act[k]=='R') { rep[k]%=4; post[row][col] = ( post[row][col] - rep[k] ) % 4; if(post[row][col]<0) //注意余数为负的情况 post[row][col]+=4; } else if(act[k]=='F') { if(post[row][col]==0) //N方向移动判断 for(i=1;i<=rep[k];i++) { if(num[row-i][col]) //如果该格存在编号(即存在另外的robot) { cout<<"Robot "<<num[row][col]<<" crashes into robot "<<num[row-i][col]<<endl; flag=true; break; } if(row-i<1) //判断是否撞墙 { cout<<"Robot "<<num[row][col]<<" crashes into the wall"<<endl; flag=true; break; } if(i==rep[k]) { //移动中若无任何碰撞,则把robot原坐标记录的信息更新到新坐标 post[row][col]=-1; //原坐标方向重置 num[row][col]=0; //原坐标编号重置 row-=rep[k]; xx[rob[k]]-=rep[k]; post[row][col]=0; //新坐标方向更新 num[row][col]=rob[k]; //新坐标编号更新 } } else if(post[row][col]==1) //E方向移动判断 for(i=1;i<=rep[k];i++) { if(num[row][col+i]) { cout<<"Robot "<<num[row][col]<<" crashes into robot "<<num[row][col+i]<<endl; flag=true; break; } if(col+i>a) { cout<<"Robot "<<num[row][col]<<" crashes into the wall"<<endl; flag=true; break; } if(i==rep[k]) { post[row][col]=-1; num[row][col]=0; col+=rep[k]; yy[rob[k]]+=rep[k]; post[row][col]=1; num[row][col]=rob[k]; } } else if(post[row][col]==2) //S方向移动判断 for(i=1;i<=rep[k];i++) { if(num[row+i][col]) { cout<<"Robot "<<num[row][col]<<" crashes into robot "<<num[row+i][col]<<endl; flag=true; break; } if(row+i>b) { cout<<"Robot "<<num[row][col]<<" crashes into the wall"<<endl; flag=true; break; } if(i==rep[k]) { post[row][col]=-1; num[row][col]=0; row+=rep[k]; xx[rob[k]]+=rep[k]; post[row][col]=2; num[row][col]=rob[k]; } } else if(post[row][col]==3) //W方向移动判断 for(i=1;i<=rep[k];i++) { if(num[row][col-i]) { cout<<"Robot "<<num[row][col]<<" crashes into robot "<<num[row][col-i]<<endl; flag=true; break; } if(col-i<1) { cout<<"Robot "<<num[row][col]<<" crashes into the wall"<<endl; flag=true; break; } if(i==rep[k]) { post[row][col]=-1; num[row][col]=0; col-=rep[k]; yy[rob[k]]-=rep[k]; post[row][col]=3; num[row][col]=rob[k]; } } } if(flag)break; } if(!flag) cout<<"OK"<<endl; } return 0; }















 1222
1222

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









