






点击上方“大鱼机器人”,选择“置顶/星标公众号”
福利干货,第一时间送达!
![]()
本文出品公众号:达尔闻说
推荐各位关注
------------------正 文------------------
对无人机感兴趣的同学,工程师都可放心“食用”。
高能预警:此组分享人(上海大学:程航,高良磊,刘成语 )是2019全国电赛B题复测该组别的第1名,也就是国一队伍里的NO.1噢!!
B题可以说是所有题目里最具观赏性的,↓↓戳演示视频:
B题制胜的最关键点是?
如果一定要强调一点,那就是飞机设计的精巧。

这一点在我们飞机轴距上有很大的体现,我们飞机的轴距约为210mm,这次竞赛大部分队伍所使用的飞机轴距都在300mm以上,轴距变小,使得飞机PID调参变得更加方便简单,也使飞机姿态调整速度快,更加灵巧。
针对此次竞赛题目而言,小飞机也有天然优势,比如拍照距离可以更近,飞机稳定性可以更好。
而针对小飞机存在的载重不足的固有缺陷,我们也通过精密计算,确定大致的载重需求,并挑选相匹配型号的电机,对该缺点进行了改进。
最终我们的飞机载重为680g左右,已经完全满足了模块搭载的需要,并且基本没有影响到飞机的稳定性。
其次是方案设计巧妙(下文会有详细介绍),在很多方面都跳出了题目的限制以及固有的思维,比如飞机巡线方案的设计、飞机自旋方案的设计相比之下都是独树一帜的,并且也取得了极好的飞行效果。
另外,在调试过程中完成的一些任务逻辑上的优化与改进也使得我们的设计方案更加完善,从而使得飞机能够更好地适应意外情况。
最后是充足的准备。我们不仅利用拨码开关设计了多版飞控程序,增强了飞机对于环境的适应性,并且针对自选题目也在测评前进行了突击训练,针对飞机的一些特殊飞行动作的软件设计思路进行了详细的整理,另外也准备了很多测评材料,在不违反赛事规则的前提下保证更加有利的测评环境,争取更好的测评效果。
比起正式的方案,我想更多人关心的是我们的设计思路和思考的过程,于是我们花大篇幅来分享,这些点也是大家容易踩坑的地方:
巡线方案的选择。与其他高校同学交流过后,发现大家都在被如何巡线的问题困扰,无论是地面很淡的灰白条纹,还是很细的电线,如果依靠图像识别去完成该题目的确有很大难度,并且存在着很大的不确定性,从结果来看,采用此方案的队伍验收情况也不是很好,飞机飞行很难稳定。
我们组则跳出了巡线的限制,选择依靠光流模块去做直线来完成任务,利用这一方案,则需要考虑以下几方面的问题:飞机稳定定高,我们的飞机定高采用的是超声波模块与气压计模块的数据融合,再经过高度方向上的PID调参,则可保证稳定的定高效果;
起始点与终点的选择,我们利用了激光测距模块来确定A.B两杆的位置,也就是确定飞机直线飞行的起点和终点,我们利用激光数据,保证飞机稳定飞行在距杆(线)30cm的位置,从而保证黄色色块识别的成功率。这样,飞机则可以保证稳定飞完全程。
地面的选择。由于我们飞机飞行依靠光流模块定位,因此地面环境的影响很大,题目中建议使用的灰白条纹同样不适用于我们的方案。
因此在市赛中,我们使用的地面是木质地板,国赛中,我们使用的地面是铺了半透明薄布大理石地面
(注:大理石由于其强反光性,光流是无法正常工作的,因此在征得评委同意后,在大理石地面上铺了一层薄布,消除了大理石地面的反光,保留了大理石地面的纹理,从而解决了地面问题)。
飞机自旋的问题。飞机自旋看上去是比较直接的绕杆方法,但实际上飞机自旋会严重影响飞机飞行的稳定性,另外也会破坏依靠光流模块建立的运动坐标系,从而增加软件设计的难度。
因此我们选择保持飞机朝向不变,仅通过前后左右平移来实现飞机的运动,同时加装舵机来控制摄像头旋转,从而保证飞行途中条形码与二维码均能进入摄像头视野中,这样既保证了任务的正常完成,也保证了飞行的稳定性不受干扰。
条形码与二维码的拍摄问题。条形码与二维码的拍摄与扫描是该任务的重点,增加扫描成功率是该题目拿分的关键,因此我们从如下角度对这一问题进行解决和优化:
首先经测试发现,盲拍到的条形码扫描成功率极低,因此我们在程序中加入了条形码与二维码的识别;
然后针对条形码与二维码识别率低的问题,我们在定位到黄色色块和B杆时,加入了飞机位置调整的步骤,将飞机尽可能靠近条形码(或二维码),从而提升识别率以及照片的清晰度;
最后在任务优化的过程中,我们将码识别方案改为限时识别,超时盲拍,从而保证了照片拍摄质量,又提高了任务完成效率。
另一方面,照片拍摄储存也有一定讲究,经实测后,我们发现,拍摄的照片为灰度图时,照片质量较高,并且将分辨率格式设置为VGA格式后,拍摄到的照片会更加清楚,在照片存储时,将照片格式保存为JPG,并将压缩质量调至最高,则可最大限度提升照片质量。
通过这些设置,进一步提升了照片拍摄的质量,也就进一步提高了条形码与二维码的识别率。
任务鲁棒性的提升。在我们的软件设计中,有许多应对意外情况的保护措施。例如当激光模块未扫描到A杆,到达一定距离后,飞机会进行往返运动,直至其扫描到A杆,保证任务的正常开始;
当视觉模块扫描到黄色色块时,飞机会进入距离屏蔽模式,在拍照离开色块一定距离后,识别任务重新开始,以避免同一色块重复识别的问题;当激光模块未扫描到B杆,飞机飞至极限距离后,飞机会返回至固定点,进行盲拍,保证任务的继续进行;
视觉模块中也设计了不重复拍照,不重复识别的保护。这些措施均是对于在我们调试过程中发现的一些意外情况进行的优化,从而使得我们的飞机在出现任何意外情况均可以飞完全程。
当然,针对环境的变化,我们利用飞控板上的拨码开关,可以进行飞行模式切换,从而适应激光模块失效,二维码位置变化等极端环境情况,大大增强了飞机飞行的可适应性,保证飞行任务的万无一失。
B题巡线机器人的任务要求
方案解析:硬件、软件以及测试结果
以下主要分享的是软硬件系统及软件的流程,关于整体方案的论证选择,以及理论分析、测试情况的完整报告,可以在“达尔闻”微信号回复:电赛无人机,获取报告。
1)主要器件:
飞控板型号:TM4C129G
光流模块型号:PWM3901
超声波模块型号:KS103
激光模块型号:VL53L0X
姿态解算模块型号:MPU9250
2)视觉模块硬件设计:
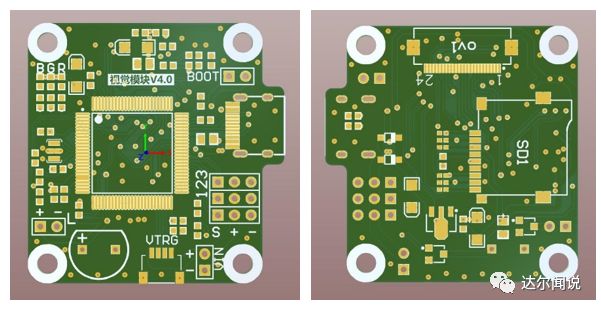
主要器件方面,采用STM32H7高性能单片机作为主控,其主频为400MHz。摄像头采用的是软排线的模组,非BGA封装,体积减小的同时,还可以轻松焊接,并且可以根据实际需求更换不同功能的摄像头。
接口方面,采用了USB-Type-C接口,其寿命和稳定性都有大幅提高且不易损坏。
降压方面,选择线性稳压以确保输出的电源稳定无波纹。
设计时,为了使设备工作更加稳定,选用了4枚大容量钽电容,以确保图像信号的稳定无杂波。
配备了两个独立的大功率驱动电路,负责放大IO的控制能力,其中一个现在用于控制蜂鸣器,保证声音足够响亮。
配备3路舵机控制信号输出,用来快速转动响应。为了在调试时不至于损坏电脑,在USB供电和DC供电间使用了2枚二极管和一个电感进行隔离。
3)飞控板硬件设计:
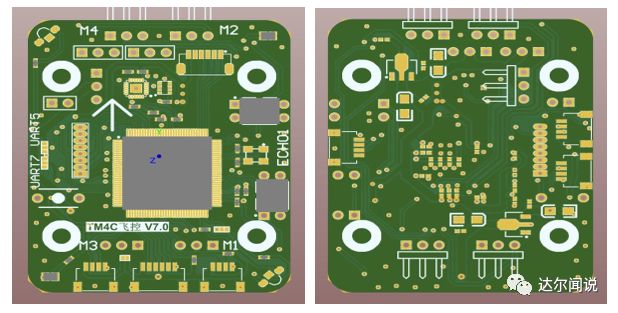
飞控主芯片采用高性能的TM4C129芯片,主频为120MHz。
接口方面,从单片机引出了4路串口,1路IIC接口和2路SPI接口,具有丰富的扩展性。
配备2路舵机接口,可以由飞控直接控制舵机转动。4位拨码开关用于模式切换,以应对各种复杂的飞行任务。
一键起飞按键,可脱离遥控完成自主起飞。预留了nRF无线模块的接口,可以方便的进行调试或遥控飞行。
电源方面,分离式双电源供电,电池电压经分压板降压后输入飞控板,一路3.3V稳压负责供应板子上的核心芯片,另一路负责所有的外部设备。供电部分预留50%以上的供电余量,防止出现供电不足的情况,同时可减少线性电源的发热。
为了使设备工作更加稳定,选用了4枚大容量钽电容,以应对电流陡升的情况,确保飞行稳定。外接扩展设备提供供电选择跳线,可自行选择3.3V或5V供电。
4)软件框图
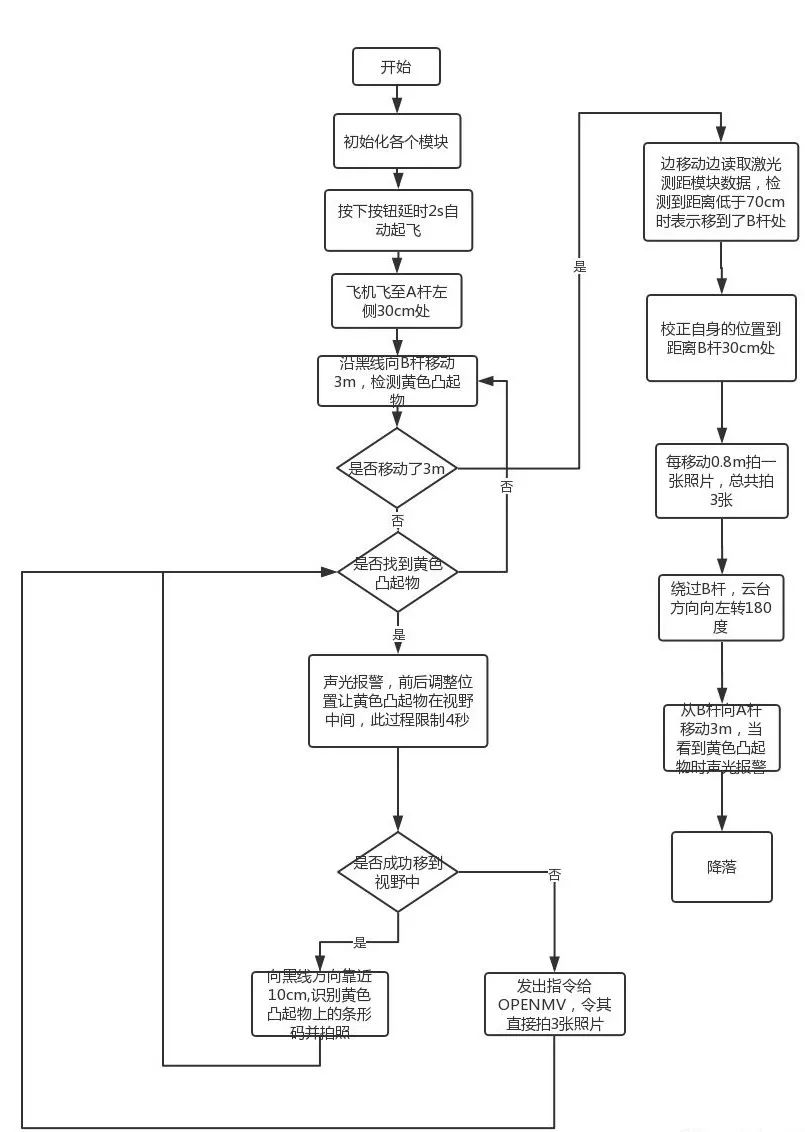
飞行器工作流程图
流程解释:上电之后飞行器初始化各个模块,当按下按钮之后两秒飞行器自动起飞,之后飞行器会飞至A杆左侧30cm处,然后沿黑线向B杆移动3m,检测黄色凸起物。
若找到黄色凸起物,则发出声光报警,前后调整位置让黄色凸起物在视野中间,此过程限制4秒,若在4秒内黄色凸起物成功移动到视野中心,则飞行器向黑线靠近10cm识别黄色凸起物上的条形码并拍照,若4秒内无法让黄色凸起物移动到视野中心,则发出指令给OpenMV,令其直接拍3张照片。
当飞行器走满3m时,则开始读取激光测距数据,检测到距离低于70cm时表示移到了B杆处,然后校正自身的位置到距离B杆30cm处,之后每移动0.15m拍一张照片,共拍3张,然后绕过B杆,云台方向向左转180度,从B杆向A杆移动3m,当看到黄色凸起物时声光报警,最后在A杆边降落。
5)测试结果
悬停,飞行器放置在自定起点位置,一键启动,飞行器垂直上升至1m的高度,悬停十秒后自动降落,在此时间内,飞行器的水平坐标并未发生大幅偏移。
自主巡航,飞行器上电,一键启动,能够按照自定路线完成巡航,巡航过程中,摄像头基本能够拍摄到场地内的任意范围。
通信,OpenMV模块连接串口调试助手,双方通信正常,OpenMV可以通过接收串口调试助手发出的指令完成识别任务,同时发送正确的应答。
识别,手持OpenMV测试黄色色块识别,识别率接近百分之百。测试条形码与二维码的识别,在距离约为20cm处,识别率可以满足任务要求。悬挂重物悬停,飞行器分别在四个旋翼轴下方悬挂重物,经过修改偏移量之后,飞行器能够稳定悬停。
“此次比赛的成功,是意料之外却又在情理之中的”,说到总结心得有几点建议给到想要来年参赛的同学们:
目标纯粹方能走得更远。我们参赛并非一心为荣誉,以学习心态参与,注重个人能力提升。珍惜每一次与其他高校交流的机会,保持低调,冷静,迎难而上。
吃苦的精神。早9晚10,无周末,反复在实验室训练,多方面提升飞机性能。
充分的准备和试错。提前备用各种材料,考虑各种情境、环境,以备不时之需。

推荐阅读:
//end
大家好,我是张巧龙,一名电子技术爱好者,会写一些关于硬件与软件结合的技术文章。
若觉得文章对你有帮助,转发分享,也是我们继续更新的动力。
关注下方公众号,后台回复:更多资源。
送你一份学习资源大礼包~
 长按识别图中二维码关注
长按识别图中二维码关注


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









