







JoinABLe: Learning Bottom-up Assembly of Parametric CAD Joints
JoinABLe: Learning Bottom-up Assembly of Parametric CAD Joints(JoinABLe:学习自底向上的参数化CAD关节装配)
2022CVPR
主要作用:CAD装配
Fusion 360 Gallery:https://github.com/AutodeskAILab/Fusion360GalleryDataset
摘要
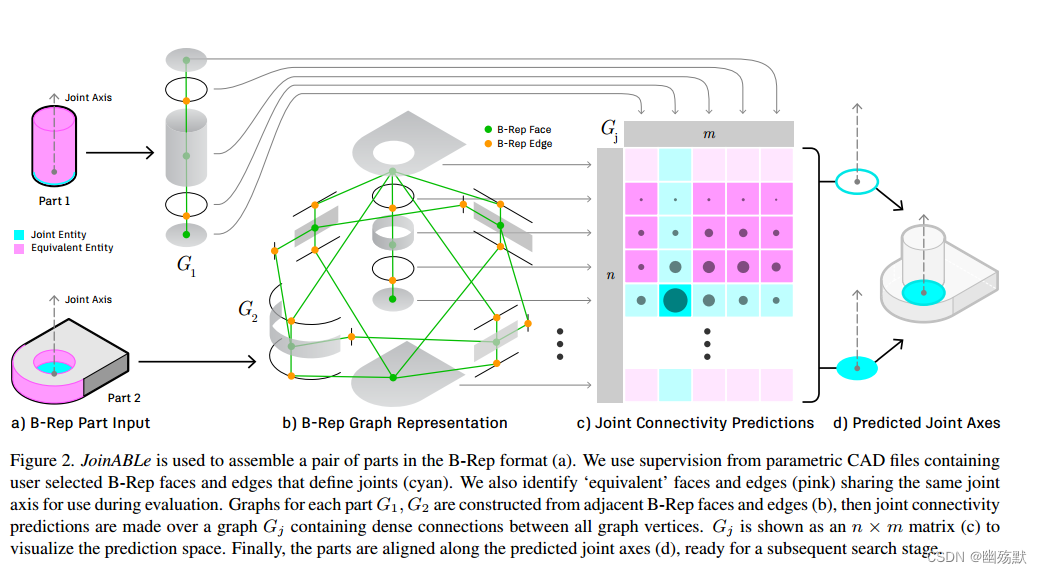
实体产品通常是由计算机辅助设计(CAD)软件建模的大量3D部件组合而成的复杂组件。CAD设计人员通过使用称为接头的约束将单个部件对齐来构建这些组件。本文介绍了一种基于学习的方法JoinABLe,它可以将零件组装在一起形成关节。JoinABLe使用标准参数化CAD文件中可用的弱监督,而无需对象类标签或人工指导。我们的结果表明,通过在实体模型的图形表示上进行网络预测,我们可以以接近人类表现(80%)的准确率(79.53%)胜过多个基线方法。最后,为了支持未来的研究,我们发布了Fusion 360 Gallery装配数据集,其中包含了关于关节、接触面、孔和底层装配图结构的丰富信息的装配。
贡献
本文的贡献:
-
本文提出了一种基于学习的方法,利用参数化CAD文件中的弱监督来实现零件对的自动装配。这是我们第一次在没有对象或部件类标签、人工注释或用户指导的帮助下完成的。
-
我们创建并发布了Fusion 360 Gallery装配数据集,其中包含具有关节、接触面、孔和底层装配图结构丰富信息的CAD装配。
-
我们提供了关节轴和关节姿态预测任务的实验结果,人类基线研究,并与多种其他方法进行了比较。
框架
结论
我们的长期目标是使装配感知设计工具,能够建议和自动放置零件。这样的系统可以在新设计中更好地重用现有的物理组件,并有可能降低与制造和相关供应链相关的成本和环境影响[29]。了解零件是如何组装的也是机器人组装和拆卸的关键。基于cad的机器人拆卸系统可以提高我们重复使用和回收部件的能力[8,35,41,45]。在这项工作中,我们已经开始了通过学习参数化CAD关节的自下而上组装来解决这些挑战的第一步。我们的研究结果表明,基于学习的方法有望接近人类CAD专家的表现,随着我们数据集的发表,我们希望进一步帮助未来的研究。















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









