









 本文深入探讨了CAN(Controller Area Network)总线的物理层特性,包括CAN_H和CAN_L的逻辑识别机制,以及在不同异常状态如短路、接地故障时的响应。针对CAN总线的物理层故障,如CANH和CANL互相短路、短接电源或地,分析了错误类别和故障恢复时间,并提出了实时监控方案。示波器在识别和诊断这些异常状态中发挥了关键作用。
本文深入探讨了CAN(Controller Area Network)总线的物理层特性,包括CAN_H和CAN_L的逻辑识别机制,以及在不同异常状态如短路、接地故障时的响应。针对CAN总线的物理层故障,如CANH和CANL互相短路、短接电源或地,分析了错误类别和故障恢复时间,并提出了实时监控方案。示波器在识别和诊断这些异常状态中发挥了关键作用。
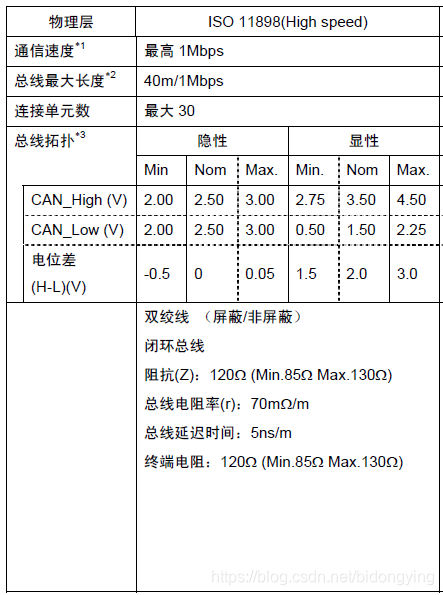
can物理层
对于恶劣的工业和汽车环境,可通过隔离CAN发送器的逻辑接口进一步增强系统的鲁棒性,允许接地节点之间出现较大的电位差,同时提供抗高电压瞬变能力。
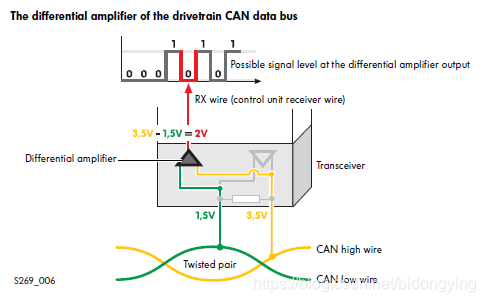
1,CAN_H和CAN_L识别机制
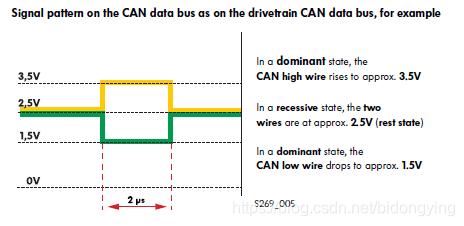
1-1 CAN上逻辑值0还是1取决于CAN-H和CAN-L之间的差(CAN-D),双绞线用来抵消CAN-H和CAN-L同时变化时产生的噪声。
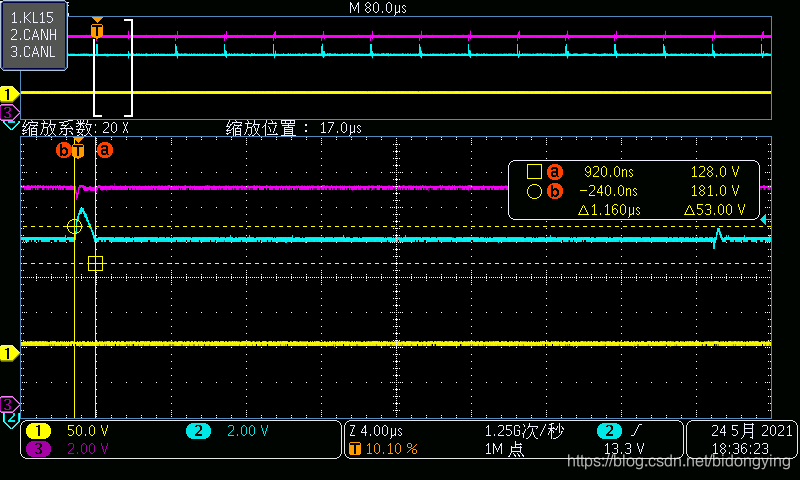
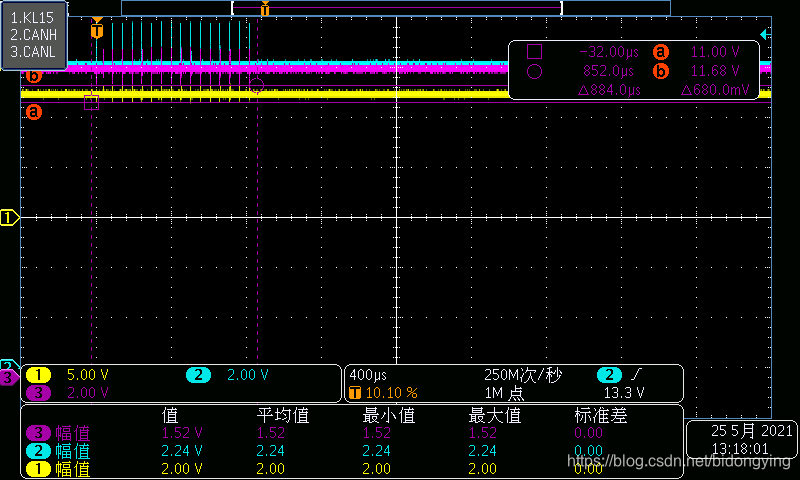
1-2 500k波特率单个信号时间长度为2us
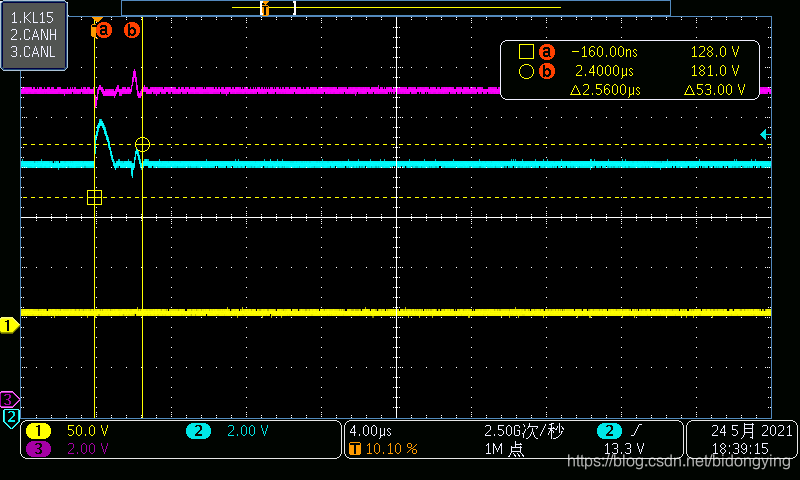
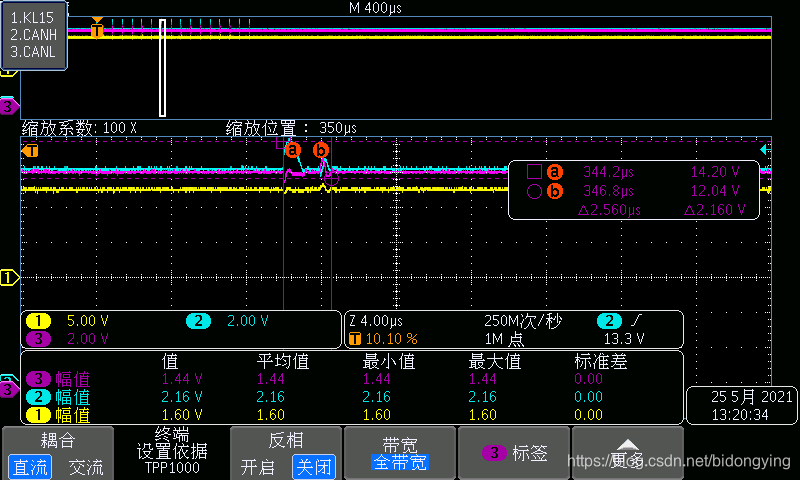
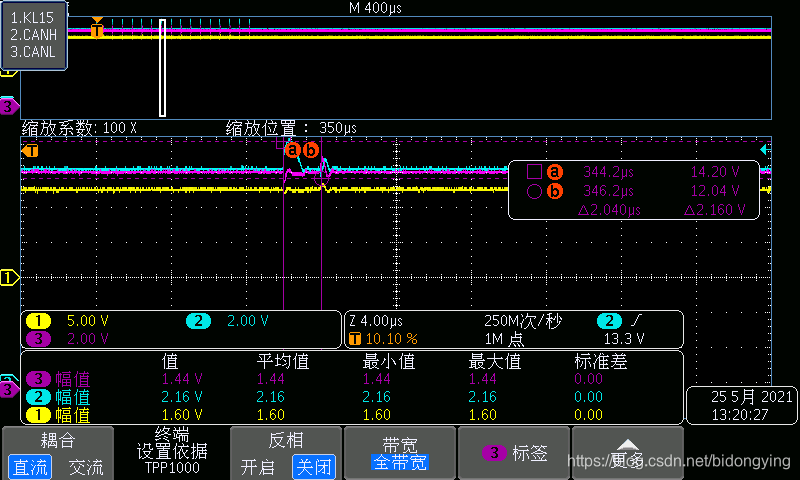
1-3 CAN_H和CAN_L正常报文博士波形。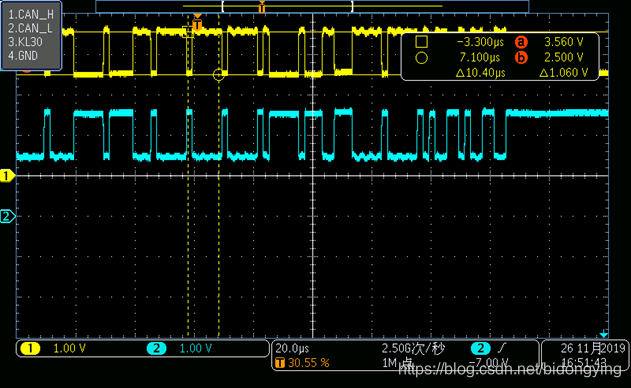
1-4 CAN_H幅值差
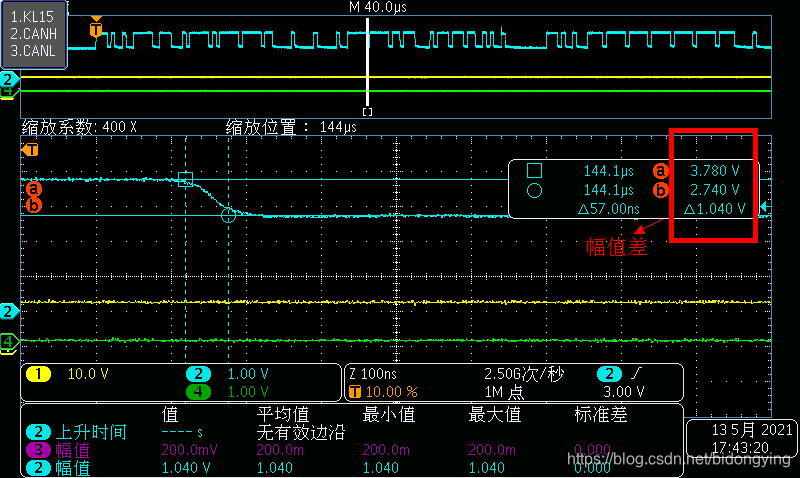
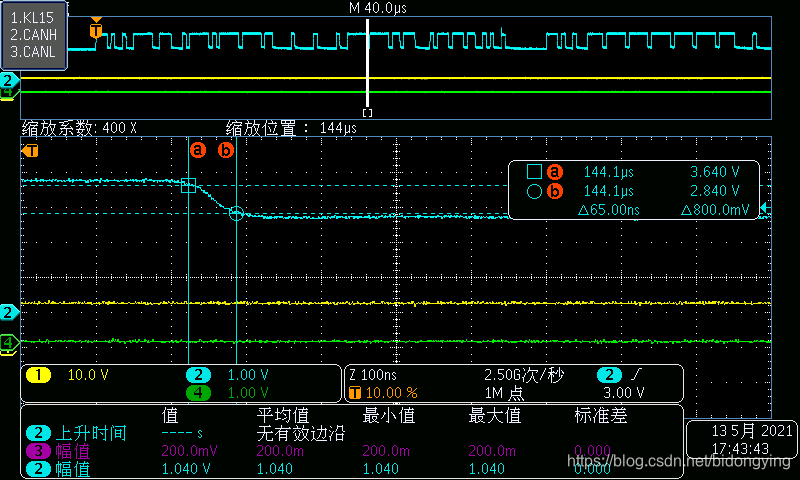
1-5 CAN_H和下降沿下降时间(10%-90%)
2,can总线上的物理层的异常状态
2-1 物理层故障类别
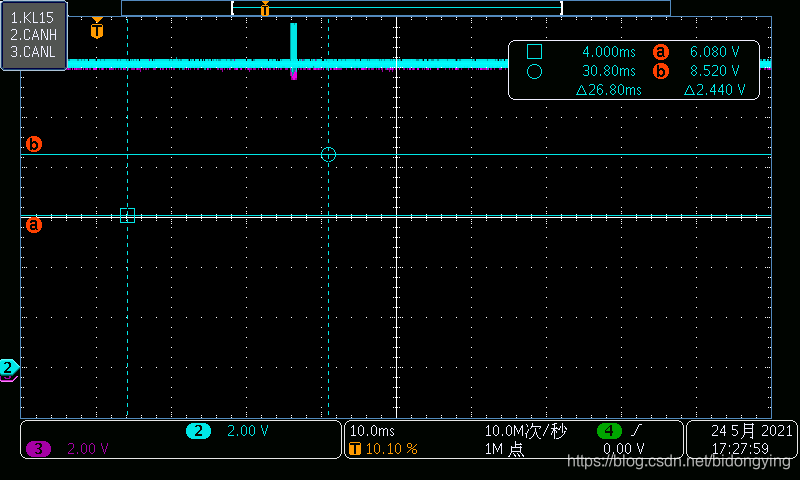
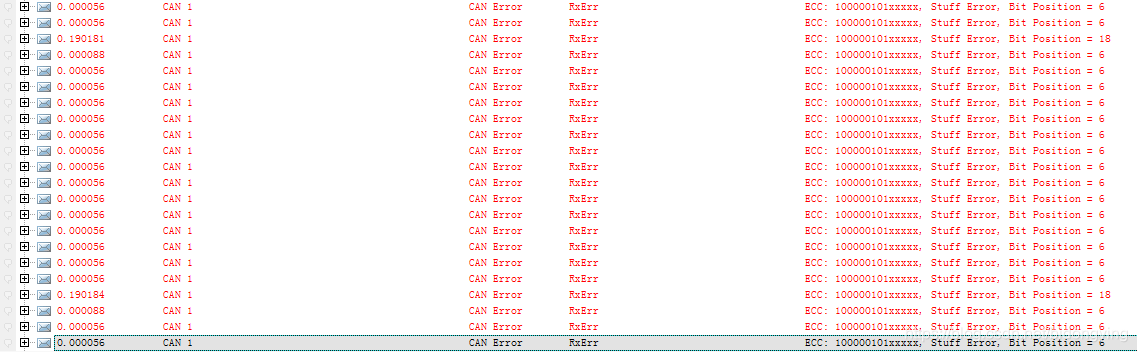
2-1-1 CANH和CANL互相短路:此时总线上是没有报文的,此case下发送节点内部会产生busoff,此时的CANH和CANL的基准电平没有改变。
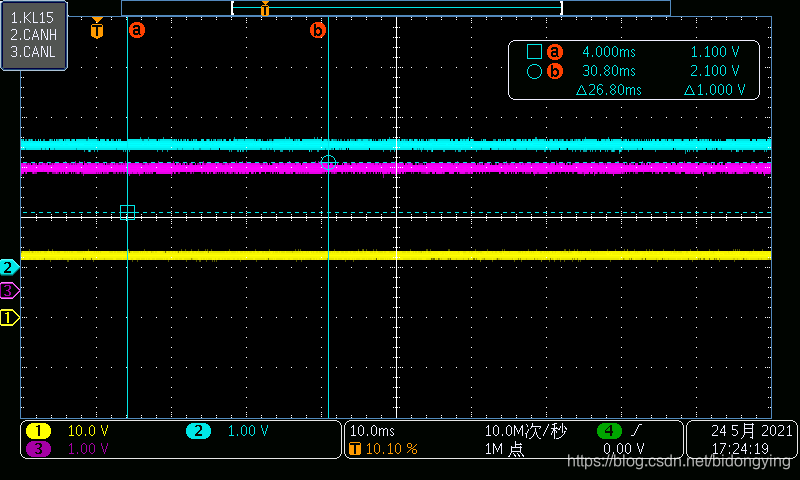
错误类别为stufferror

2-1-2 CANH短电源:此case CANoe报文上没有错误帧,如下示波器,可见电平发生了变化,报文可以正常识别,物理层基准电平是不正常的。
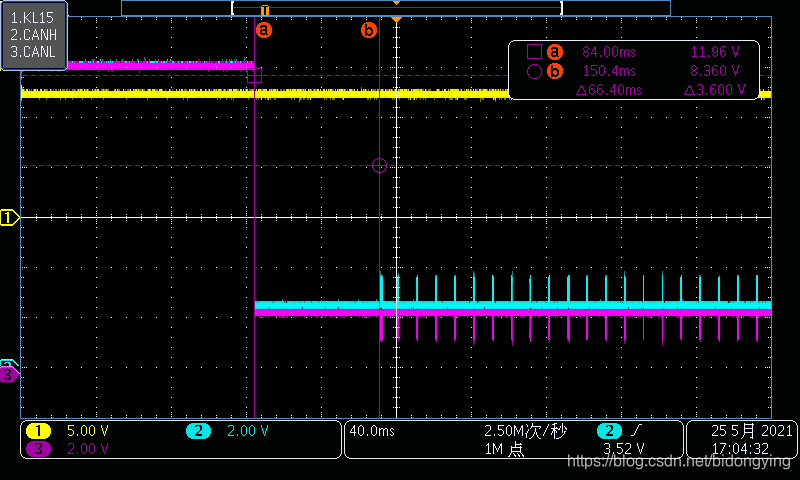
2-1-3 CANL短电源:此case下,CANoe检测存在错误帧,发送错误帧。发生busoff后按照快慢恢复周期进行尝试恢复。在物理层没有恢复之前,会周期性的发送错误帧周期性的尝试恢复。
失真版的busoff

错误类别为stufferror
2-1-4 CANH短地:此case下,CANoe检测存在错误帧,发送错误帧。发送busoff后按照快慢恢复周期进行尝试恢复。在物理层没有恢复之前,会周期性的发送错误帧周期性的尝试恢复。
CAN错误计数会累积到报出busoff
错误类别:stufferror
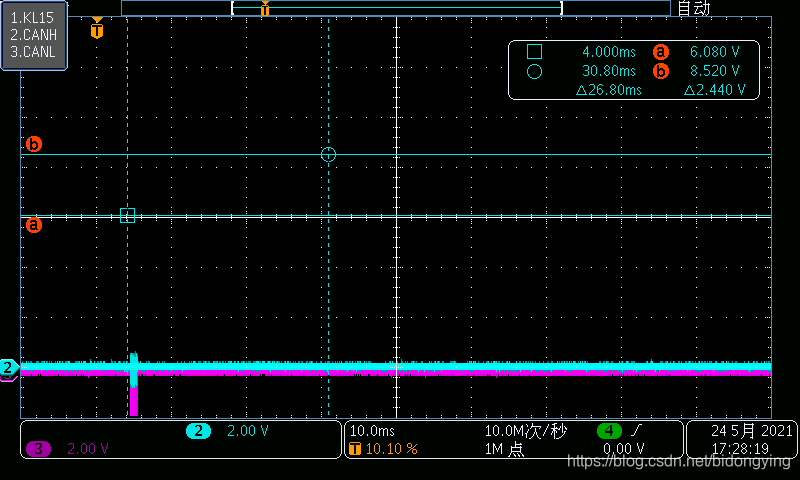
2-1-5 CANL短地:此case CANoe报文上没有错误帧,如下示波器,可见基准电平发生了变化。
2-2,can总线上的物理层的异常状态实时监控方案
逛网页偶然收获,收藏下这项应用(直接应用示波器的直观变化差异去识别)
http://www.openedv.com/posts/list/37708.htm
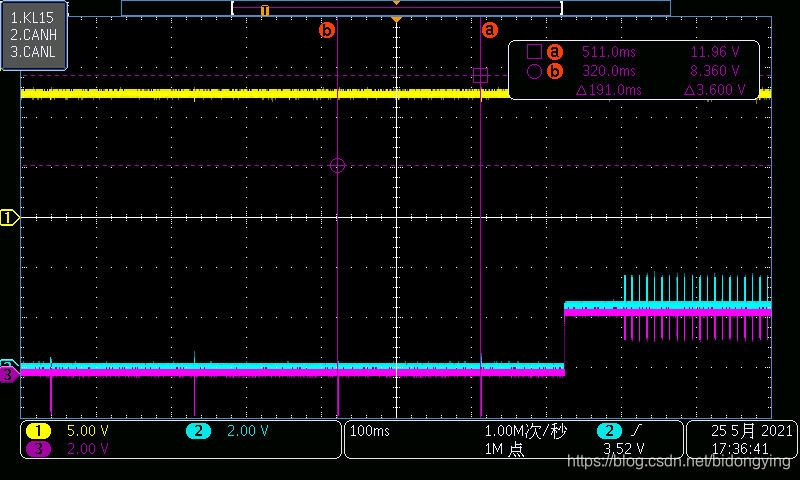
2-3,can busoff 故障恢复时间:示波器捕捉到的是慢恢复的周期范围内都是符合要求的。
2-3-1 CANH短地恢复时间

2-3-2 发送错误帧。发生busoff后按照快慢恢复周期进行尝试恢复。在物理层没有恢复之前,会周期性的发送错误帧周期性的尝试恢复。
2-3-3 CANH短电源恢复时间10ms内,总线没有故障,恢复物理层的短路在报文周期内,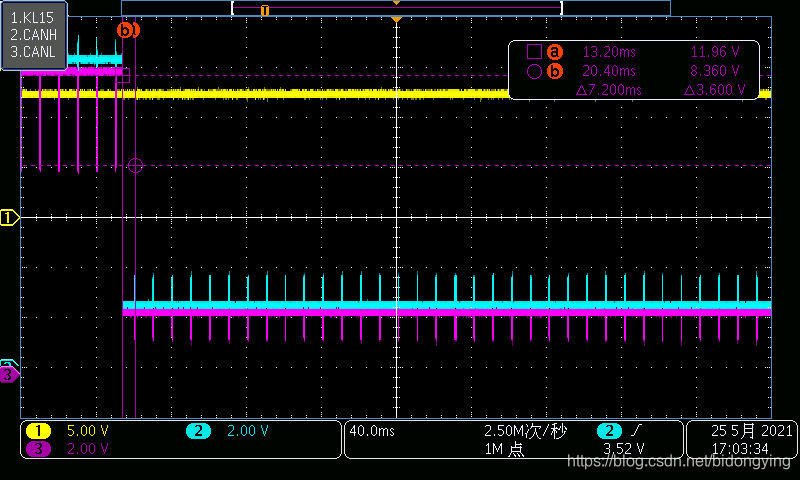
2-3-4 CANH短CANL-首次发送帧比较多
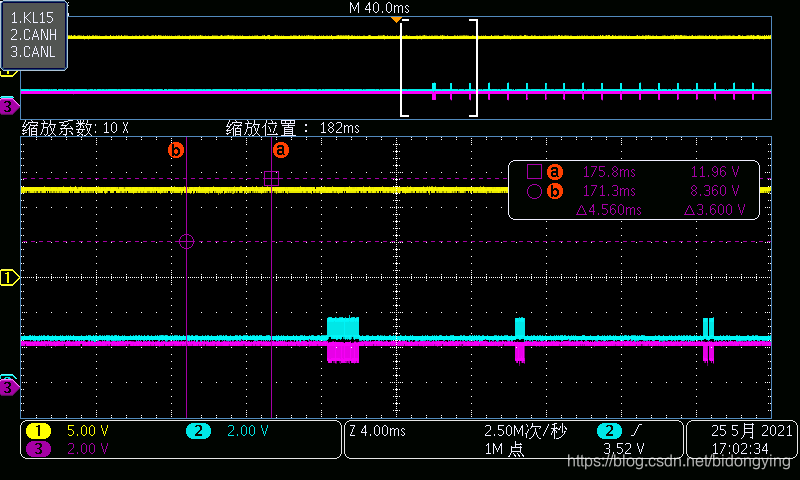
2-3-5 CANL短电源恢复时间66.4ms
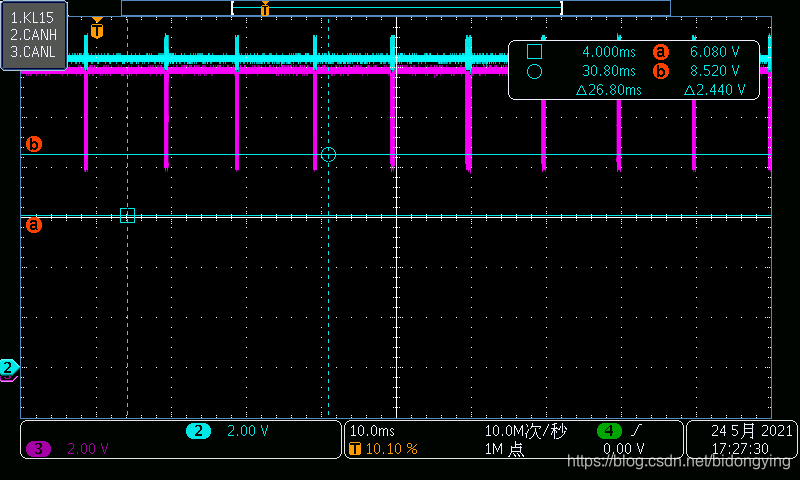
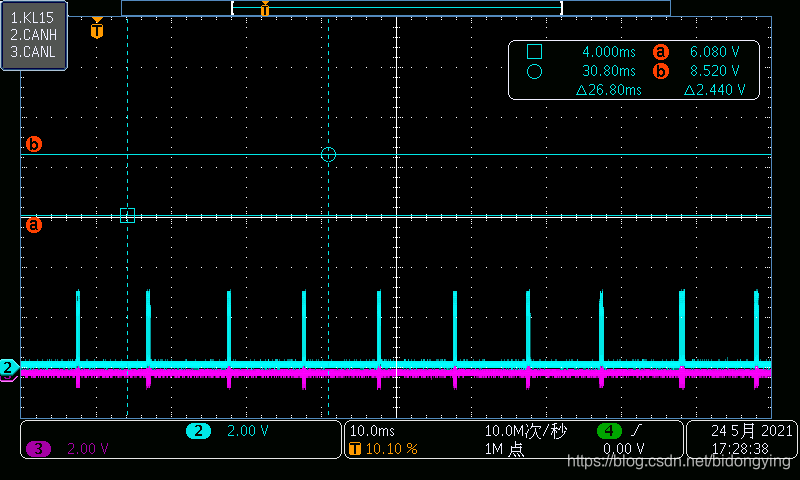
2-4 busoff 示波器捕捉示意图,理论是发送32个错误帧 32*8=256>255,实际示波器捕捉到了的是18个一周期为50us左右的发送一个错误簇
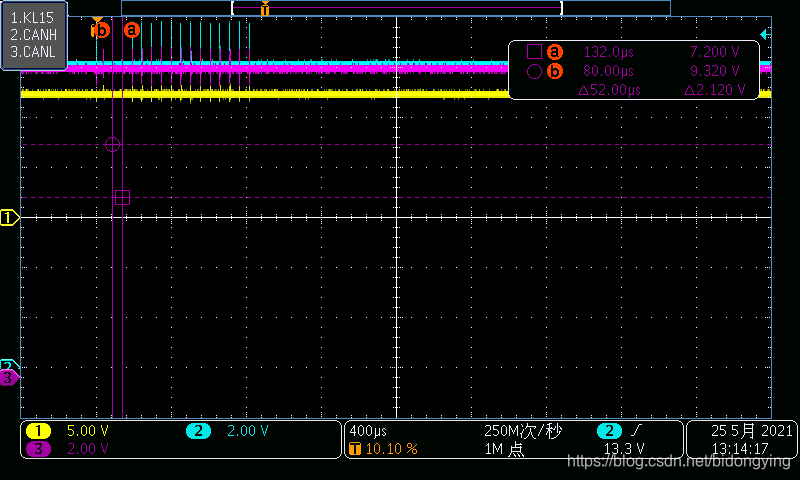
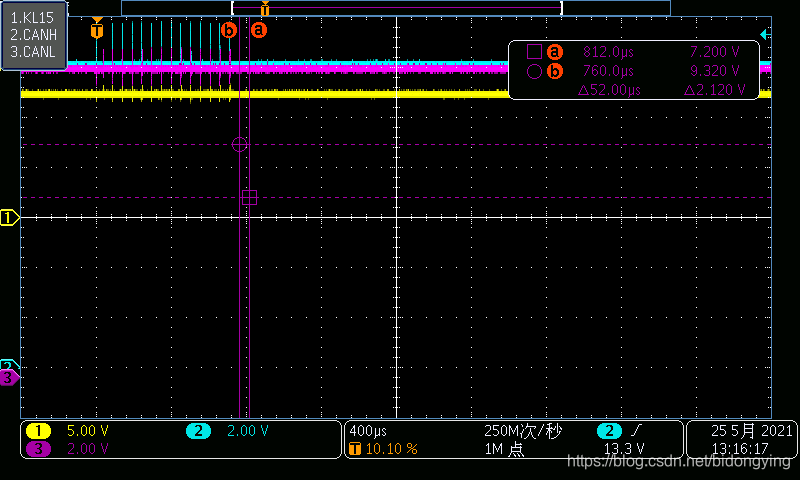
错误簇

参考
配置控制器局域网络(CAN)位时序,优化系统性能
瑞萨can入门书


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









