







在工业控制领域,PID 控制凭借结构简单、稳定性好、工作可靠等优点被广泛应用。然而,传统固定参数的 PID 控制在面对复杂多变的工况时,控制效果往往难以达到最优。基于 LabVIEW 实现 PID 控制根据情况选择参数(即参数自适应调整),能够显著提升系统性能。下面从工作原理、实现方式和实际应用等方面深入介绍这一知识点。
一、工作原理
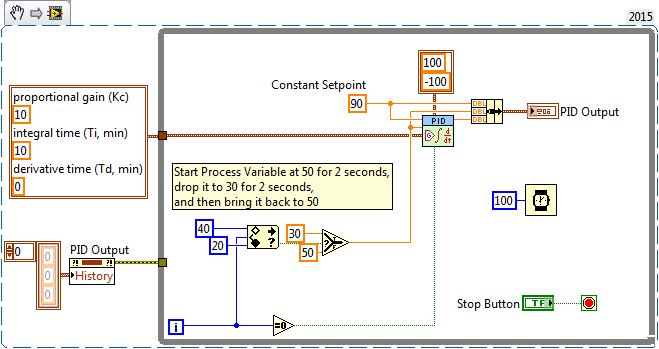
PID 控制根据设定值(Setpoint)与实际测量值(Process Variable)之间的偏差(Error)来计算控制量。基本公式为:\(u(t)=K_p \cdot e(t)+K_i \int_{0}^{t} e(\tau)d\tau + K_d \frac{de(t)}{dt}\)其中,\(u(t)\)是控制量,\(K_p\)为比例增益,\(K_i\)为积分增益(\(K_i = \frac{K_p}{T_i}\),\(T_i\)是积分时间),\(K_d\)为微分增益(\(K_d = K_p \cdot T_d\),\(T_d\)是微分时间),\(e(t)\)是当前时刻的偏差。
在实际应用中,被控对象的特性可能随时间、环境等因素变化。例如,在温度控制系统中,加热元件的效率可能会因老化而改变,环境散热条件也可能不同。此时,固定的 PID 参数无法满足控制需求。基于情况选择参数的核心思想是,根据系统当前的运行状态(如偏差大小、偏差变化率等),动态调整\(K_p\)、\(K_i\)、\(K_d\)的值,使系统始终保持良好的控制性能。
二、基于 LabVIEW 的实现方式
(一)利用模糊逻辑调整 PID 参数
-
模糊化:在 LabVIEW 中,首先将系统的偏差(Error)和偏差变化率(Change in Error)作为模糊逻辑的输入变量。将这些精确的数值按照一定的隶属度函数映射到模糊集合中,例如 “负大”“负小”“零”“正小”“正大” 等。LabVIEW 的 “模糊逻辑” 工具包提供了丰富的函数用于创建和操作隶属度函数。
-
模糊规则制定:根据经验和对被控对象的理解,制定模糊规则。例如,如果偏差为 “正大” 且偏差变化率为 “正小”,则适当增大\(K_p\)以加快响应速度,同时减小\(K_i\)避免积分饱和,\(K_d\)可根据具体情况微调。这些规则以 “IF - THEN” 的形式存储在模糊规则库中。
-
模糊推理与解模糊:通过模糊推理机制,根据输入的模糊变量和模糊规则,得出模糊的输出结果,即调整后的 PID 参数的模糊值。然后,利用解模糊方法(如重心法)将模糊输出转换为精确的数值,用于更新 PID 控制器的参数。
(二)基于模型参考自适应控制(MRAC)调整 PID 参数
-
参考模型构建:在 LabVIEW 中搭建一个理想的参考模型,该模型代表期望的系统输出响应。例如,对于一个电机速度控制系统,参考模型可以设定为在特定时间内达到目标速度且无超调的理想响应模型。
-
参数调整算法:将实际系统的输出与参考模型的输出进行比较,计算两者之间的误差。根据这个误差,采用特定的自适应算法(如 Lyapunov 稳定性理论设计的算法)来调整 PID 参数,使得实际系统的输出尽可能接近参考模型的输出。在 LabVIEW 中,可以利用数学运算函数和反馈控制结构实现这些算法。
三、实际应用案例
(一)温度控制系统
-
硬件配置:硬件选用欧姆龙温度传感器采集温度信号,通过 NI - DAQ 数据采集卡将模拟信号转换为数字信号输入到 LabVIEW 中。控制加热设备采用固态继电器,由 LabVIEW 输出的控制信号通过继电器驱动加热丝工作。
-
软件实现:在 LabVIEW 程序中,利用模糊逻辑调整 PID 参数。当温度偏差较大时,增大比例增益\(K_p\),快速提升加热功率;随着温度接近设定值,减小\(K_p\),增大积分增益\(K_i\)消除静态误差。如果温度变化过快(偏差变化率大),适当增大微分增益\(K_d\)抑制超调。通过这种方式,系统能够在不同的环境温度和加热需求下,快速、稳定地将温度控制在设定值附近。
(二)电机速度控制系统
-
硬件配置:采用编码器测量电机转速,将转速信号反馈给 LabVIEW。通过西门子 SINAMICS 变频器控制电机的输入频率,从而调节电机转速。
-
软件实现:运用模型参考自适应控制调整 PID 参数。参考模型设定电机在启动阶段快速达到目标转速且平稳运行,在负载变化时能迅速恢复稳定。当电机实际转速与参考模型输出存在偏差时,LabVIEW 根据自适应算法调整 PID 参数,实时优化变频器的控制信号,确保电机在不同负载条件下都能保持稳定、精确的转速。
四、优势与挑战
(一)优势
-
提高控制精度:能够根据系统的实时状态自动调整 PID 参数,使系统在不同工况下都能保持较高的控制精度,减少稳态误差和超调量。
-
增强系统适应性:适应被控对象特性的变化和外部干扰,提高系统的鲁棒性。例如,在工业生产中,设备老化、原材料特性改变等因素都不会对控制效果产生过大影响。
-
优化控制性能:改善系统的动态响应性能,如加快响应速度、缩短调节时间,提高生产效率和产品质量。
(二)挑战
-
算法设计复杂:无论是模糊逻辑还是模型参考自适应控制等方法,算法设计都需要深厚的理论知识和丰富的实践经验。例如,模糊规则的制定需要对被控对象有深入的理解,否则可能导致控制效果不佳。
-
系统调试难度大:由于参数自适应调整涉及多个变量和复杂的算法,系统调试过程较为复杂。需要花费大量时间和精力对算法参数进行优化,以确保系统稳定运行和良好的控制性能。
-
计算资源需求高:实时计算和调整 PID 参数需要一定的计算资源。在一些资源受限的系统中,可能需要优化算法或升级硬件以满足计算需求,增加了系统成本和复杂性。
基于 LabVIEW 实现 PID 控制根据情况选择参数,为工业控制提供了更智能、高效的解决方案。尽管面临一些难点,但随着技术的发展和工程师经验的积累,这种技术将在更多领域得到广泛应用和不断完善。


















 2859
2859

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









