






- ---- 彻底理解C语言运行机制
1.虚拟内存(Virtual Memory)
1.1 为什么要有虚拟内存
- 内存(memory)资源永远都是稀缺的,当越来越多的进程需要越来越来内存时,某些进程会因为得不到内存而无法运行;
- 内存容易被破坏,一个进程可能误踩其他进程的内存空间;
- 虚拟内存提供了哪些能力?
- 高效使用内存:VM将内存看成是存储在磁盘上的地址空间的高速缓存,内存中保存热的数据,根据需要在磁盘和内存之间传送数据;
- 简化内存管理:VM为每个进程提供了一致的地址空间,从而简化了链接、加载、内存共享等过程;
- 内存保护:保护每个进程的地址空间不被其他进程破坏。
举例:
有的同学接触过单片机,而单片机是没有操作系统的,所以每次写完代码,都需要借助工具把程序烧录进去,这样程序才能跑起来。但是要想在内存中同时运行两个程序是不可能的,这是因为单片机引用了绝对物理地址。

如果我们面向linux操作系统开发,linux会把进程所使用的地址【隔离】开来,让操作系统为每个进程分配独立的一套【虚拟地址】,人人都有,大家自己玩自己的地址就行,互不干涉。但是有个前提每个进程都不能访问物理地址,至于虚拟地址最终怎么落到物理内存里,对进程来说是透明的,操作系统已经把这些都安排的明明白白了。

操作系统会提供一种机制,将不同进程的虚拟地址和不同内存的物理地址映射起来。
1.2 内存管理
1.2.1 内存分段
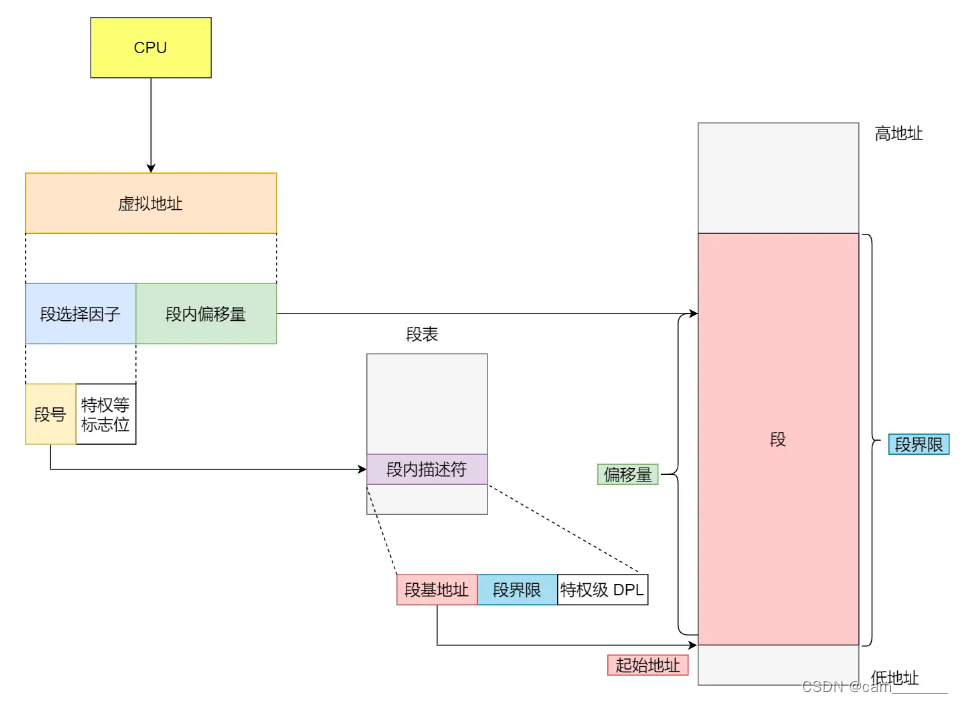
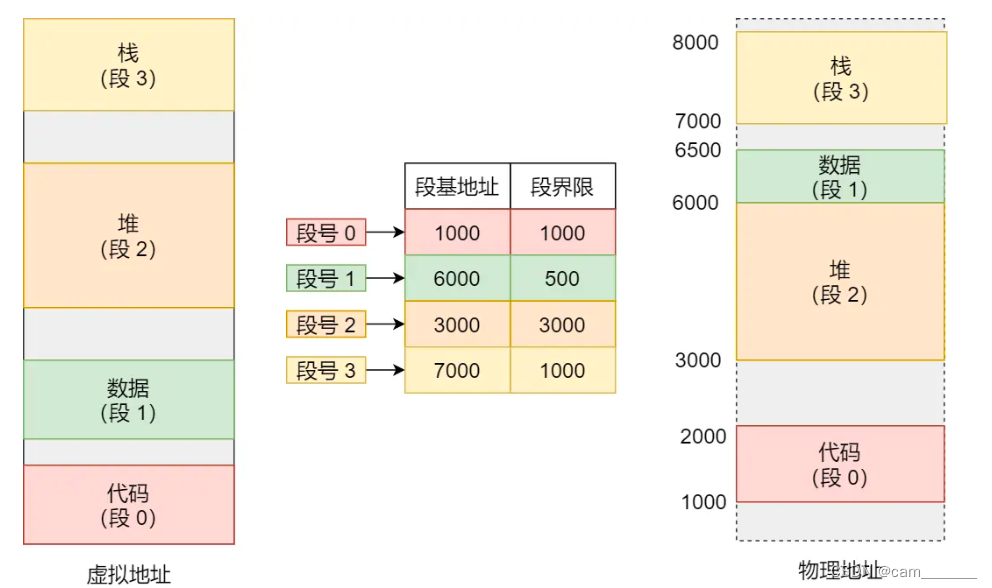
- 虚拟地址是通过段表与物理地址进行映射的,分段机制会把程序的虚拟地址分成 4 个段,每个段在段表中有一个项,在这一项找到段的基地址,再加上偏移量,于是就能找到物理内存中的地址。
缺点:
- 内存碎片问题
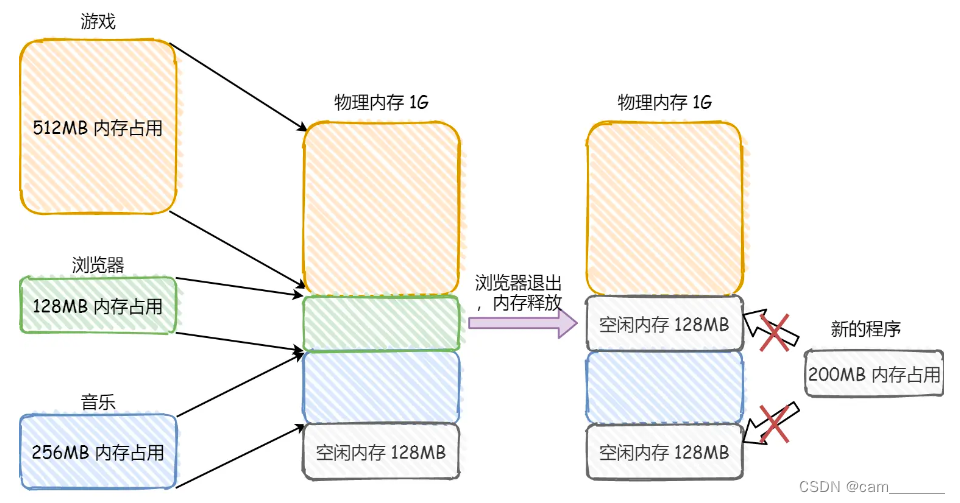
- 解决方式:内存交换
可以把音乐程序占用的那 256MB 内存写到硬盘上,然后再从硬盘上读回来到内存里。不过再读回的时候,我们不能装载回原来的位置,而是紧紧跟着那已经被占用了的 512MB 内存后面。这样就能空缺出连续的 256MB 空间,于是新的 200MB 程序就可以装载进来。
在 Linux 系统里,也就是我们常看到的 Swap 空间,这块空间是从硬盘划分出来的,用于内存与硬盘的空间交换
- 内存交换的效率低问题
硬盘的访问速度要比内存慢太多了,每一次内存交换,我们都需要把一大段连续的内存数据写到硬盘上。如果内存交换的时候,交换的是一个占内存空间很大的程序,这样整个机器都会显得卡顿。
1.2.2 内存分页
- 分页是把整个虚拟和物理内存空间切成一段段固定尺寸的大小。这样一个连续并且尺寸固定的内存空间,我们叫页(Page)。在 Linux 下,每一页的大小为 4KB
- 这么做的好处是页与页之间是紧密排列的,所以不会有内存碎片。
- 内存分页机制分配内存的最小单位是一页,即使程序不足一页大小,最少也得分配一个页
- 如果内存空间不够,操作系统会把其他正在运行的进程中的「最近没被使用」的内存页面给释放掉,也就是暂时写在硬盘上,称为换出(Swap Out)。一旦需要的时候,再加载进来,称为换入(Swap In)。
- 分页的方式使得我们在加载程序的时候,不再需要一次性都把程序加载到物理内存中。我们完全可以在进行虚拟内存和物理内存的页之间的映射之后,并不真的把页加载到物理内存里,而是只有在程序运行中,需要用到对应虚拟内存页里面的指令和数据时,再加载到物理内存里面去。(这也是8g内存的电脑能玩100多g游戏的原因)
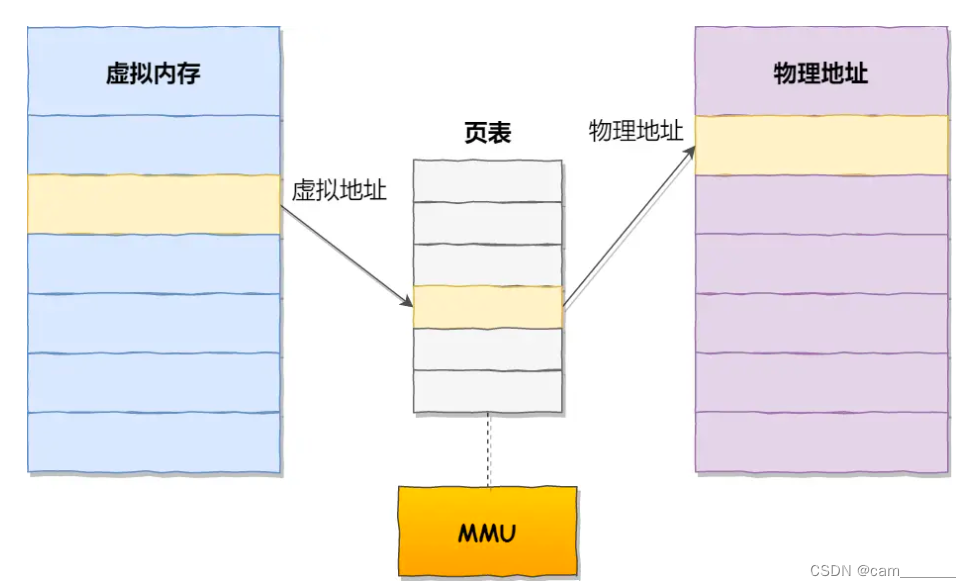
- 分页机制下,虚拟地址和物理地址是如何映射的?
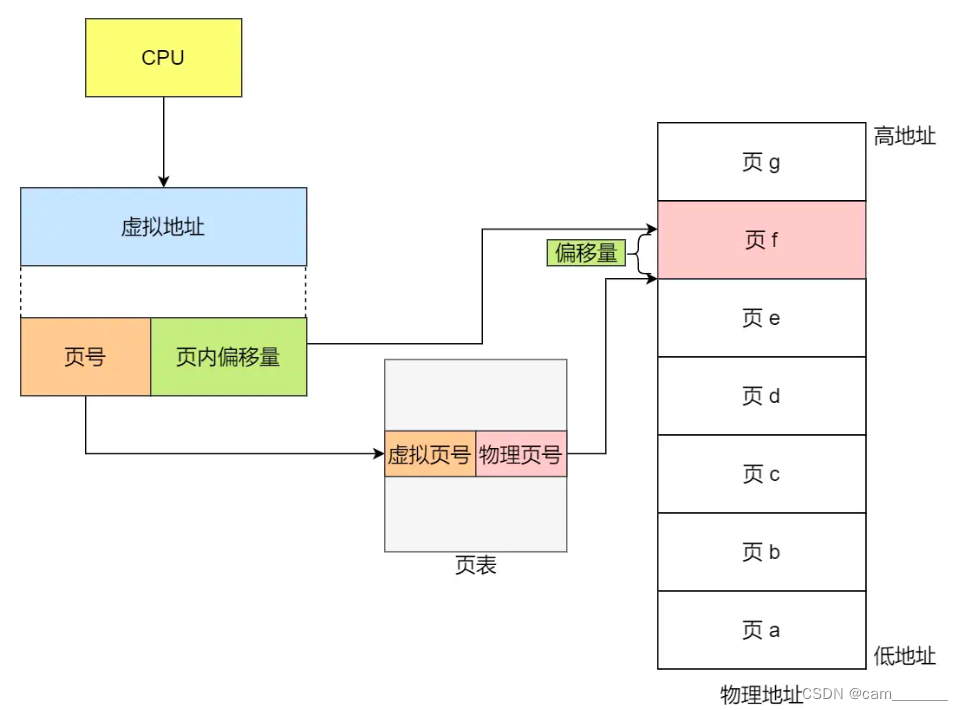
- 在分页机制下,虚拟地址分为两部分,页号和页内偏移。页号作为页表的索引,页表包含物理页每页所在物理内存的基地址,这个基地址与页内偏移的组合就形成了物理内存地址
缺点:
- 空间上的缺陷:因为操作系统是可以同时运行非常多的进程的,那这不就意味着页表会非常的庞大,在 32 位的环境下,虚拟地址空间共有 4GB,假设一个页的大小是 4KB(2^12),那么就需要大约 100 万 (2^20) 个页,每个「页表项」需要 4 个字节大小来存储,那么整个 4GB 空间的映射就需要有 4MB 的内存来存储页表。
- 这 4MB 大小的页表,看起来也不是很大。但是要知道每个进程都是有自己的虚拟地址空间的,也就说都有自己的页表。 那么,100 个进程的话,就需要 400MB 的内存来存储页表,这是非常大的内存了,更别说 64 位的环境了。
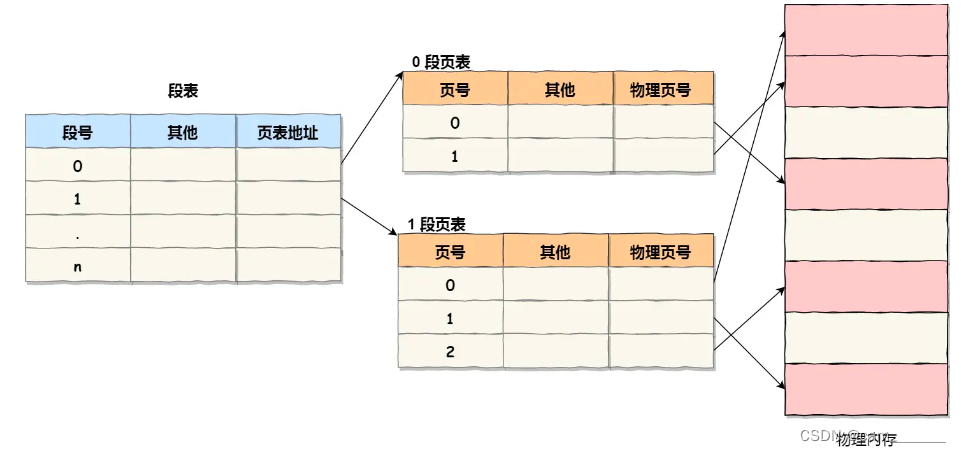
1.2.3 段页式
- 段页式是内存分段和内存分页的组合方式。
- 段页式内存管理实现的方式:
- 先将程序划分为多个有逻辑意义的段,也就是前面提到的分段机制;
- 接着再把每个段划分为多个页,也就是对分段划分出来的连续空间,再划分固定大小的页;
2.Linux-C进程内存布局(重点)
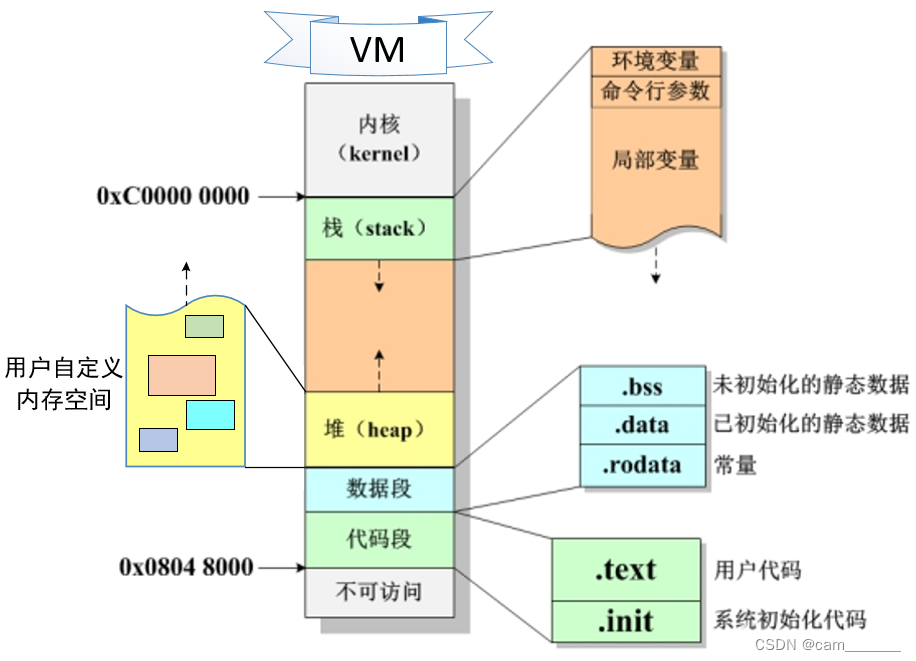
- 任何一个程序,正常运行都需要内存资源,用来存放诸如变量、常量、函数代码等等。这些不同的内容,所存储的内存区域是不同的,且不同的区域有不同的特性。因此我们需要研究内存布局,逐个了解不同内存区域的特性。
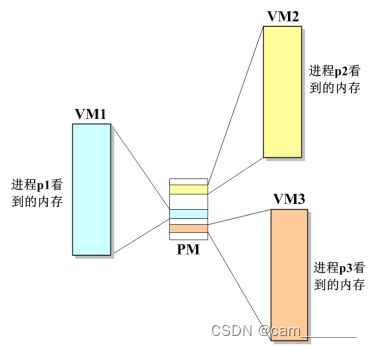
- 每个C语言进程都拥有一片结构相同的虚拟内存,例如三个完全不相干的进程p1、p2、p3,它们很显然会占据不同区段的物理内存,但经过系统的变换和映射,它们的虚拟内存的布局是完全一样的。
- PM:Physical Memory,物理内存。
- VM:Virtual Memory,虚拟内存。
- 将其中一个C语言进程的虚拟内存放大来看,会发现其内部包下区域:
- 栈(stack)
- 堆(heap)
- 数据段
- 代码段
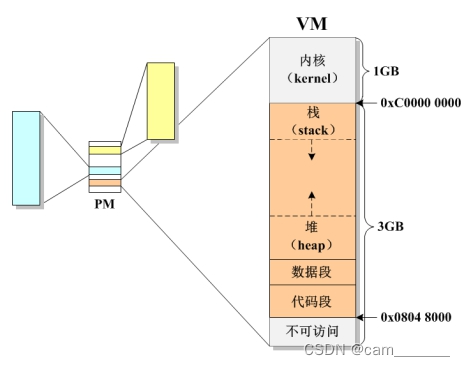
- 虚拟内存中,内核区段对于应用程序而言是禁闭的,它们用于存放操作系统的关键性代码,另外由于 Linux 系统的历史性原因,在虚拟内存的最底端 0x0 ~ 0x08048000 之间也有一段禁闭的区段,该区段也是不可访问的。
2.1 栈内存
- 栈,又称堆栈,是现代计算机程序极为重要的组成部分,几乎所有的函数调用都依赖于栈进行实现。栈维护了一个函数调用过程中所需要的信息,被称为栈帧。栈帧中一般维护了以下几类重要的数据:
- 函数返回地址:记录了函数执行完成后,退出函数调用时需要执行的下一条指令
- 函数参数:在调用子函数时,程序将函数参数依序保存在栈上
- 局部变量:函数调用过程中使用的非静态局部变量均默认保存在栈上,函数退出后,这些变量也会被释放而不可使用
- 保存的寄存器(环境变量等):保存了函数调用前后需要保持不变的寄存器
- 在程序运行过程中,每次执行函数调用,都会建立一个栈帧,连续的过程调用会让栈不断朝着“栈顶”的方向进行扩展;在函数调用完成后,栈帧会被自动释放,栈也会随之缩减。在大多数体系结构上,栈的扩展方向都是由高地址向低地址进行扩展。
- 栈内存有什么特点?
- 空间有限,尤其在嵌入式环境下。因此不可以用来存储尺寸太大的变量。
- 每当一个函数被调用,栈就会向下增长一段,用以存储该函数的局部变量。
- 每当一个函数退出,栈就会向上缩减一段,将该函数的局部变量所占内存归还给系统。
- 栈内存的分配和释放,都是由系统规定的,我们无法干预。
例:
#include <stdio.h>
void swap(int pa, int pb)
{
// 通过指针,交换实参a和b
int tmp;
tmp = pa;
pa = pb;
pb = tmp;
printf("%s\n", __FUNCTION__); // swap
printf("a: %d\n", pa); // a: 2
printf("b: %d\n", pb); // b: 1
}
// “__FUNCTION__”报告未修饰过的(也就是未裁剪过的)、正在被访问的函数名
// 会在函数大括号开始之后就立即初始化
int main()
{
int a = 1;
int b = 2;
// 交换a和b的值
swap(a, b);
printf("%s\n", __FUNCTION__); // main
printf("a: %d\n", a); // a: 1
printf("b: %d\n", b); // b: 2
return 0;
}更改为地址传递后:
#include <stdio.h>
void swap(int *pa, int *pb)
{
// 通过指针,交换实参a和b
int tmp;
tmp = *pa;
*pa = *pb;
*pb = tmp;
printf("%s\n", __FUNCTION__);
printf("a: %d\n", *pa); // a: 2
printf("b: %d\n", *pb); // b: 1
}
int main()
{
int a = 1;
int b = 2;
// 交换a和b的值
swap(&a, &b);
printf("%s\n", __FUNCTION__);
printf("a: %d\n", a); // a: 2
printf("b: %d\n", b); // b: 1
return 0;
}例:
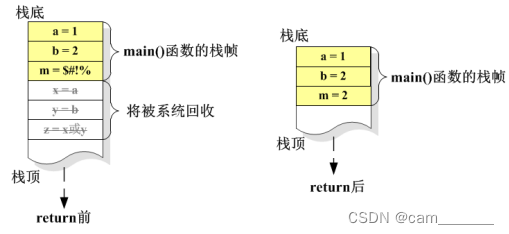
int max(int x, int y) // 变量 x 和 y 存储在max()函数的栈中
{
int z; // 变量 z 存储在max()函数的栈中
z = x>y ? x : y;
return z; // 函数退出后,栈中的x、y 和 z 被系统回收
}
int main(void)
{
int a = 1; // 变量 a 存储在main()函数的栈中
int b = 2; // 变量 b 存储在main()函数的栈中
int m; // 变量 m 存储在main()函数的栈中,未赋值因此其值为随机值
m = max(a, b);
}
2.2 数据段和代码段
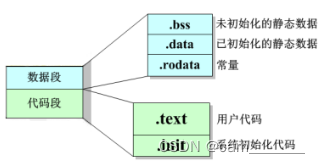
- 数据段细分成如下几个区域:
- .bss 段(Block Started by Symbol):未初始化的全局变量和静态局部变量保存在bss段,它们将被系统自动初始化为0。
- .data段(data segment):数据段。保存已经初始化的全局变量和静态局部变量。
- .rodata段(read only data):只读数据段。存放的是只读数据,一般是程序里面的只读变量(const修饰的变量)、字符串变量、常量数据(printf 的格式化字符也算)。
- 代码段细分成如下几个区域:
- .text段:存放用户代码
- .init段:存放系统初始化代码
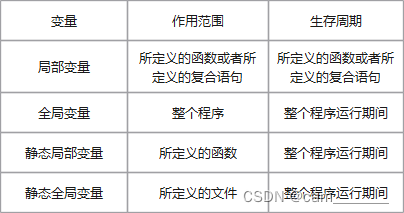
2.2.1 局部变量
- 在函数内部定义的变量是局部变量,其有效范围是局限于函数内部的,形参也是局部变量。
- 正是因为局部变量的有效使用范围的局限,可以最大程度的确保各函数之间的独立性,避免函数之间相互干扰。
#include <stdio.h>
int main(void)
{
int a = 1; /*主函数的局部变量,有效范围整个主函数*/
{ /*复合语句开始*/
int b = 2; /*复合语句内的局部变量,有效范围在两个大括号之内*/
} /*复合语句结束*/
printf("%d\n", a); /*出了复合语句变量b就无法使用了*/
return 0;
}2.2.2 全局变量
- 定义在函数外的变量,不属于任何函数。其作用范围是从定义开始到程序结束,对作用范围内所有的函数都起作用。
- 全部变量的定义格式与局部变量完全一致,只是定义的位置不在函数内,它可以定义在函数的头部,也可以定义在两个函数的中间或程序尾部,只要在函数外部即可。
- 当某函数的局部变量与全局变量同名时,那么全局变量在该函数中不起作用,局部变量起作用。若不存在同名变量的函数,那么全局变量仍然起作用。
#include <stdio.h>
int a = 2, b = 3;
void fun()
{
int a = 6, b = 2;
{
int a = 9, b = 0; /*在这个复合语句中,这两个变量生效,覆盖掉与它同名的全局变量和局部变量*/
printf("a = %d, b = %d\n", a, b); /*此时:a = 9, b = 0*/
}
printf("a = %d, b = %d\n", a, b); /*这里a和b生效的是该函数开头处定义的a和b,它们覆盖掉全局变量,此时:a = 6, b = 2*/
}
int main()
{
fun();
printf("a = %d, b = %d\n", a, b); /*这里的a和b就是全局的a和b,因为没有与之同名的变量此时:a = 2, b = 3*/
return 0;
}
2.2.3 静态变量
局部静态变量
- 在局部变量之前加上关键字static,局部变量就被定义成为一个局部静态变量。
- 内存中的位置:静态存储区(使得局部变量由原来存储在栈内存,变成存储在静态存储区。)
- 初始化:未经初始化的局部静态变量会被程序自动初始化为0
- 作用域:作用域仍为局部作用域,当定义它的函数或者语句块结束的时候,作用域随之结束。
- 生存周期:当static用来修饰局部变量的时候,它就改变了局部变量的存储位置,从原来的栈中存放改为静态存储区。但是局部静态变量在离开作用域之后,并没有被销毁,而是仍然驻留在内存当中,直到程序结束
#include <stdio.h>
void f(void)
{
static int b = 200; // 静态局部变量,退出整个程序之前不会释放
printf("%d\n", b);
b++; // b的值加1
}
int main(void)
{
f();
f(); // b只会初始化一次,重复调用函数 f(),会使静态局部变量 b 的值不断增大
return 0;
}全局静态变量
- 在全局变量之前加上关键字static,全局变量就被定义成为一个全局静态变量。
- 内存中的位置:静态存储区
- 初始化:未经初始化的全局静态变量会被程序自动初始化为0
- 作用域:全局静态变量在声明他的文件之外是不可见的。准确地讲从定义之处开始到文件结尾。
- 定义全局静态变量的好处:
- 不会被其他文件所访问,修改
- 其他文件中可以使用相同名字的变量,不会发生冲突。
//a.c
#include <stdio.h>
extern int a;
extern void fun1();
int main()
{
printf("%d\n",a);
fun1();
}//b.c
#include <stdio.h>
// static int a=100;
int a=100;
void fun1()
{
int b=200;
printf("%d\n",b);
}编译命令:
cam@ubuntu:~/code$ gcc -c a.c
cam@ubuntu:~/code$ gcc -c b.c
cam@ubuntu:~/code$ gcc a.o b.o -o main
cam@ubuntu:~/code$ ./main总结:
- 为什么需要静态数据?
- 全局变量在默认的情况下,对所有文件可见,为某些需要在各个不同文件和函数间访问的数据提供操作上的方便。
- 当我们希望一个函数退出后依然能保留局部变量的值,以便于下次调用时还能用时,静态局部变量可帮助实现这样的功能。
-
- 注意:
- 若定义时未初始化,则系统会将所有的静态数据自动初始化为0
- 静态数据初始化语句,只会执行一遍。
- 静态数据从程序开始运行时便已存在,直到程序退出时才释放。
举例:
int a; // 未初始化的全局变量,放置在.bss 中
int b = 100; // 已初始化的全局变量,放置在.data 中
int main(void)
{
static int c; // 未初始化的静态局部变量,放置在.bss 中
static int d = 200; // 已初始化的静态局部变量,放置在.data 中
int e; // 局部变量,放置在栈中
// 以上代码中的常量100、200放置在.rodata 中
}
2.3变量存储类型
- auto:函数中的局部变量,动态地分配存储空间,数据存储在动态存储区中,在调用该函数时系统会给它们分配存储空间,在函数调用结束时就自动释放这些存储空间。
- register:为了提高效率,C语言允许将局部变量的值放在CPU中的寄存器中,这种变量叫“寄存器变量”,只有局部自动变量和形式参数可以作为寄存器变量。
- extern:外部变量(即全局变量)是在函数的外部定义的,它的作用域为从变量定义处开始,到本程序文件的末尾。如果外部变量不在文件的开头定义,其有效的作用范围只限于定义处到文件终了。
- static:静态局部变量属于静态存储类别,在静态存储区内分配存储单元,在程序整个运行期间都不释放。全局静态变量在声明他的文件之外是不可见的。
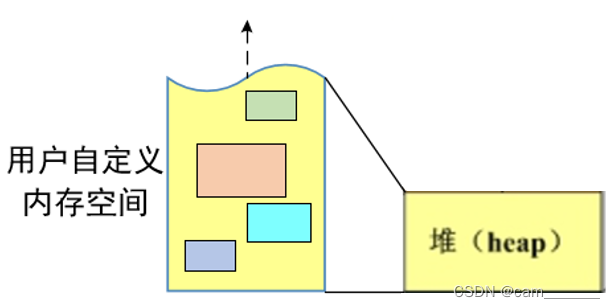
2.4 堆内存(动态内存)
- 堆内存(heap)又被称为动态内存、自由内存,简称堆。堆是唯一可被开发者自定义的区段,开发者可以根据需要申请内存的大小、决定使用的时间长短等。但又由于这是一块系统“飞地”,所有的细节均由开发者自己把握,系统不对此做任何干预,给予开发者绝对的“自由”,但也正因如此,对开发者的内存管理提出了很高的要求。对堆内存的合理使用,几乎是软件开发中的一个永恒的话题。
- 堆内存基本特征:
- 相比栈内存,堆的总大小仅受限于物理内存,在物理内存允许的范围内,系统对堆内存的申请不做限制。
- 相比栈内存,堆内存从下往上增长。
- 堆内存是匿名的,只能由指针来访问。
- 自定义分配的堆内存,除非开发者主动释放,否则永不释放,直到程序退出。
- 相关API:
- 申请堆内存:malloc() / calloc()
- 清零堆内存:bzero()
- 释放堆内存:free()
| 功能 | 申请堆内存 | |
| 所需头文件 | #include | |
| 函数原型 | void *malloc(size_t size); void *calloc(size_t count, size_t size); | |
| 参数 | size | 所申请的一块堆内存的大小,单位是字节 |
| count | 所申请的堆内存的块数,所有的内存块是连续分布的、无间隔的 | |
| 返回值 | 成功 | 返回所申请的内存空间的指针 |
| 失败 | NULL | |
| 功能 | 清零指定内存 | |
| 所需头文件 | #include | |
| 函数原型 | void bzero(void *s, size_t n); | |
| 参数 | s | 指向要清零的内存的指针 |
| n | 要清零的内存大小,单位是字节 | |
| 返回值 | 无 | |
| 功能 | 释放堆内存 | |
| 所需头文件 | #include | |
| 函数原型 | void free(void *ptr); | |
| 参数 | ptr | 堆内存指针 |
| 返回值 | 无 | |
int *p = malloc(sizeof(int)); // 申请1块大小为 sizeof(int) 的堆内存
bzero(p, sizeof(int)); // 将刚申请的堆内存清零
*p = 100; // 将整型数据 100 放入堆内存中
free(p); // 释放堆内存
p = NULL; // 置为空,以免形成野指针影响程序运行
// 申请3块连续的大小为 sizeof(double) 的堆内存
double *k = calloc(3, sizeof(double));
// calloc会在返回起始地址之前,把在堆区申请的动态内存空间的每个字节都初始化为0
k[0] = 0.618;
k[1] = 2.718;
k[2] = 3.142;
free(k); // 释放堆内存
k = NULL; // 置为空,以免形成野指针影响程序运行注意:
- malloc()申请的堆内存,默认情况下是随机值,一般需要用 bzero() 来清零。
- calloc()申请的堆内存,默认情况下是已经清零了的,不需要再清零。
- free()只能释放堆内存,不能释放别的区段的内存。
释放内存的含义:
- 释放内存意味着将内存的使用权归还给系统。
- 释放内存并不会改变指针的指向。
- 释放内存并不会对内存做任何修改,更不会将内存清零。
















 1780
1780











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











