






QD77MS4 RD77MS4 运动控制模块凸轮曲线样例程序QD77MS4 RD77MS4 运动控制模块凸轮曲线样例程序
有以下功能,可实现任意位置同步
0.手动JOG,轴定位
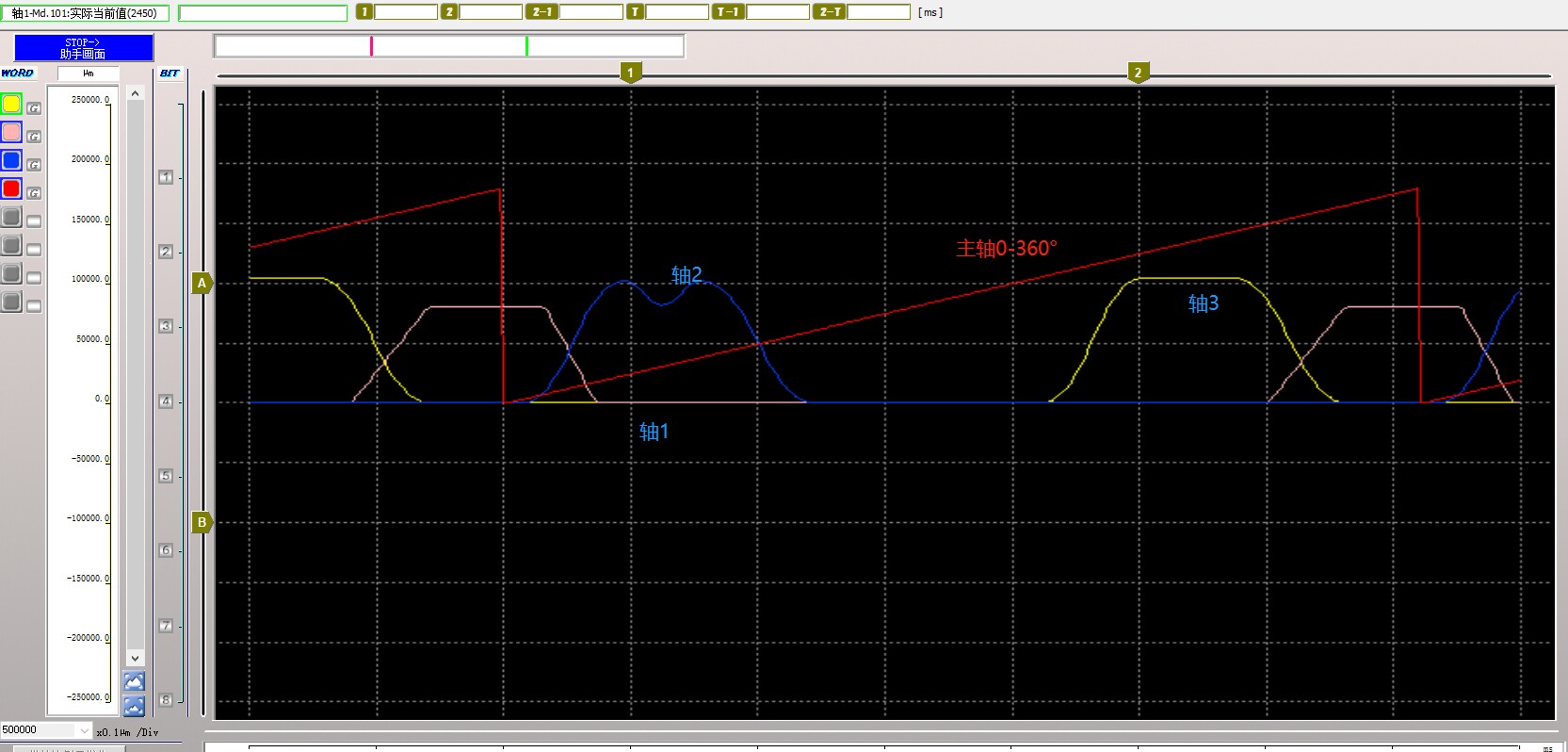
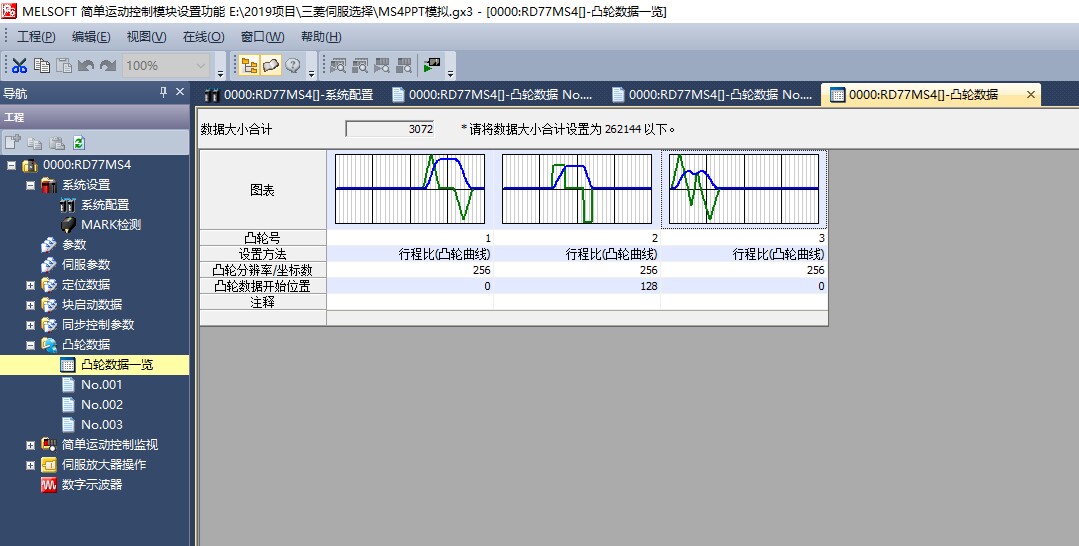
1.凸轮同步
2.凸轮位置查找
3.凸轮位置复原
ID:3110614125918798
明明如风少年

QD77MS4和RD77MS4是一种运动控制模块,它们可以帮助实现凸轮曲线样例程序。这些模块具备以下功能,能够实现任意位置的同步、手动JOG和轴定位、凸轮同步、凸轮位置查找以及凸轮位置复原。
首先,我们来了解一下手动JOG和轴定位。手动JOG是指通过对控制器的操控,手动地控制轴的运动。这种方式可以快速地改变轴的位置,从而实现对设备的调试和定位。轴定位是指将轴放置到指定的位置。在使用QD77MS4和RD77MS4模块时,用户可以通过手动JOG和轴定位来精确控制轴的位置,满足各种需求。
其次,凸轮同步是QD77MS4和RD77MS4模块的一项重要功能。凸轮同步可以实现多轴之间的同步运动。通过凸轮的运动轨迹,可以精确地控制多个轴的位置,从而实现多个设备之间的同步工作。这对于一些要求高精度运动的应用场景非常重要。QD77MS4和RD77MS4模块通过凸轮同步功能,能够使设备之间的运动更加协调和精确。
凸轮位置查找是QD77MS4和RD77MS4模块的另一项实用功能。在某些情况下,我们需要在凸轮上查找到特定位置的凸轮点。通过凸轮位置查找功能,可以在凸轮上标记出指定位置的点,从而方便后续的操作和控制。这个功能的应用范围非常广泛,可以满足各种需求。
最后,凸轮位置复原是QD77MS4和RD77MS4模块的一项便捷功能。在一些特定的场景中,我们可能需要将凸轮位置还原到某个特定的位置。通过凸轮位置复原功能,可以快速地将凸轮恢复到指定的位置,从而实现设备的复位操作。这个功能可以提高设备的效率和稳定性,对于一些要求运动复位的应用来说非常有用。
综上所述,QD77MS4和RD77MS4运动控制模块是一种非常实用的设备,通过它们可以实现凸轮曲线样例程序以及相关的功能。手动JOG和轴定位功能可以实现对轴的精确定位和调试。同时,凸轮同步功能可以使多轴之间的运动更加协调和精确。凸轮位置查找和凸轮位置复原功能可以帮助用户在特定的场景中快速地找到凸轮的指定位置以及将凸轮恢复到特定的位置。这些功能的应用范围广泛,可以满足各种需求,并提高设备的效率和稳定性。QD77MS4和RD77MS4模块的使用不仅简单方便,而且可以为用户的工作带来很大的便利。
相关代码 程序地址:http://nodep.cn/614125918798.html















 998
998











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









