







一、平台总线设备驱动模型
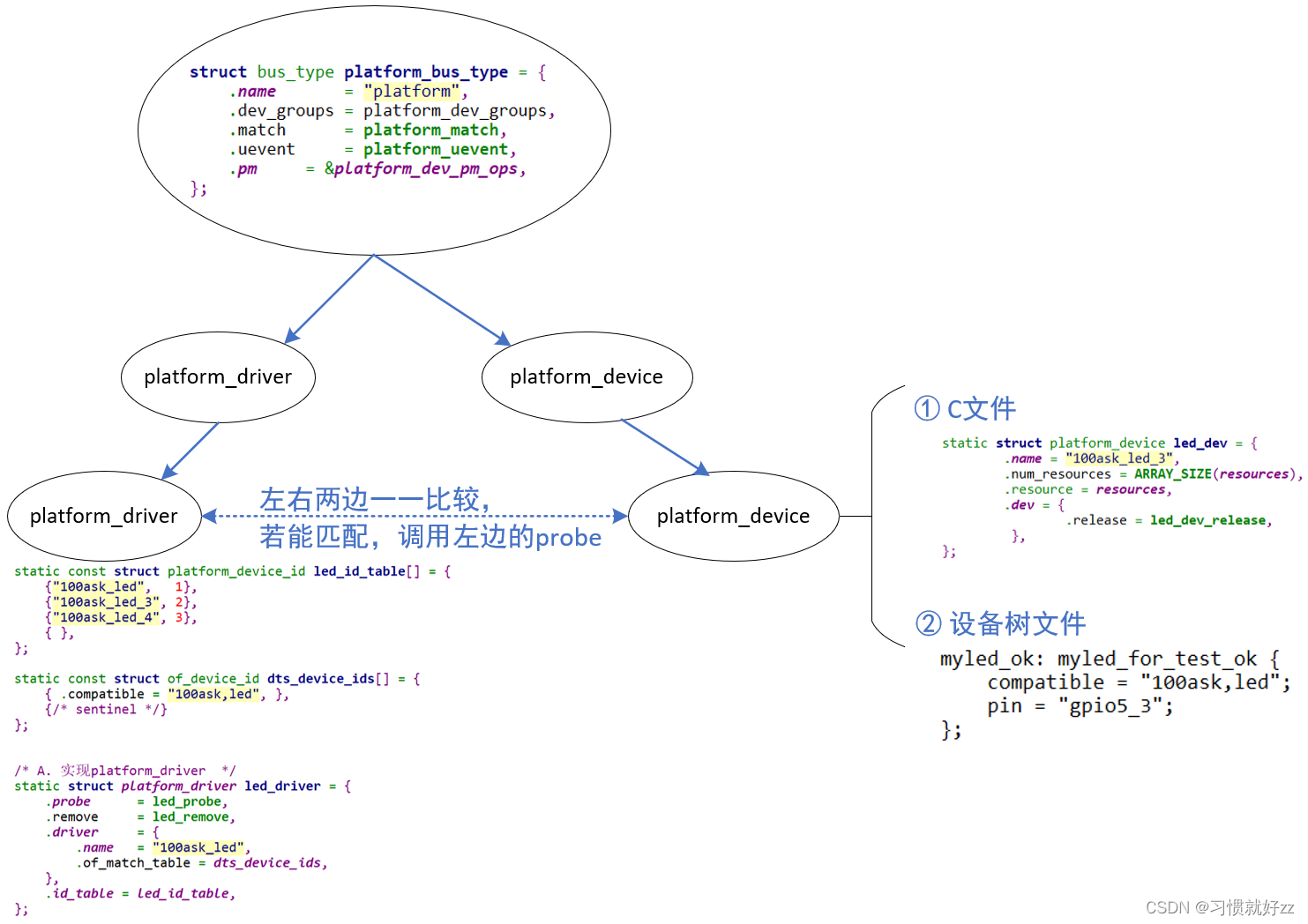
Linux驱动程序开始基于“平台总线设备驱动”模型,把驱动程序分为2边:
- 左边注册一个platform_driver结构体,里面是比较固定、通用的代码
- 右边注册一个platform_device结构体,里面是硬件资源
- 可以通过c文件注册platform_device
- 也可以通过设备树创建节点,内核解析设备树时注册platform_device
二、数据结构
SPI子系统设计2类硬件:SPI控制器、SPI设备
SPI控制器有驱动程序,提供SPI的传输能力
SPI设备也有自己的驱动程序,提供SPI设备的访问能力:
- 知道怎么访问这个设备,知道这个设备的数据什么含义
- 调用SPI控制器的函数来收发数据
2.1 SPI控制器数据结构
相关的源码include\linux\spi\spi.h
struct spi_controller {
struct device dev;
struct list_head list;
/* other than negative (== assign one dynamically), bus_num is fully
* board-specific. usually that simplifies to being SOC-specific.
* example: one SOC has three SPI controllers, numbered 0..2,
* and one board's schematics might show it using SPI-2. software
* would normally use bus_num=2 for that controller.
*/
s16 bus_num; //如果是负数,则是动态分配,整数指定用哪个spi控制器/驱动(从0开始)
/* chipselects will be integral to many controllers; some others
* might use board-specific GPIOs.
*/
u16 num_chipselect; //片选信号的个数,也就是从设备的数量,从设备个数0~num_chipselect,可以有没有连接的从设备
/* some SPI controllers pose alignment requirements on DMAable
* buffers; let protocol drivers know about these requirements.
*/
u16 dma_alignment;
/* spi_device.mode flags understood by this controller driver */
u16 mode_bits; //控制器启动的模式位,被控制器驱动解析
/* bitmask of supported bits_per_word for transfers */
u32 bits_per_word_mask;
#define SPI_BPW_MASK(bits) BIT((bits) - 1)
#define SPI_BIT_MASK(bits) (((bits) == 32) ? ~0U : (BIT(bits) - 1))
#define SPI_BPW_RANGE_MASK(min, max) (SPI_BIT_MASK(max) - SPI_BIT_MASK(min - 1))
/* limits on transfer speed */
u32 min_speed_hz;
u32 max_speed_hz;
/* other constraints relevant to this driver */
u16 flags; //全双工、半双工等
#define SPI_CONTROLLER_HALF_DUPLEX BIT(0) /* can't do full duplex */
#define SPI_CONTROLLER_NO_RX BIT(1) /* can't do buffer read */
#define SPI_CONTROLLER_NO_TX BIT(2) /* can't do buffer write */
#define SPI_CONTROLLER_MUST_RX BIT(3) /* requires rx */
#define SPI_CONTROLLER_MUST_TX BIT(4) /* requires tx */
#define SPI_MASTER_GPIO_SS BIT(5) /* GPIO CS must select slave */
/* flag indicating this is an SPI slave controller */
bool slave;
/*
* on some hardware transfer / message size may be constrained
* the limit may depend on device transfer settings
*/
size_t (*max_transfer_size)(struct spi_device *spi);
size_t (*max_message_size)(struct spi_device *spi);
/* I/O mutex */
struct mutex io_mutex;
/* lock and mutex for SPI bus locking */
spinlock_t bus_lock_spinlock;
struct mutex bus_lock_mutex;
/* flag indicating that the SPI bus is locked for exclusive use */
bool bus_lock_flag;
/* Setup mode and clock, etc (spi driver may call many times).
*
* IMPORTANT: this may be called when transfers to another
* device are active. DO NOT UPDATE SHARED REGISTERS in ways
* which could break those transfers.
*/
int (*setup)(struct spi_device *spi); //时钟和spi模式的设置函数
/* bidirectional bulk transfers
*
* + The transfer() method may not sleep; its main role is
* just to add the message to the queue.
* + For now there's no remove-from-queue operation, or
* any other request management
* + To a given spi_device, message queueing is pure fifo
*
* + The controller's main job is to process its message queue,
* selecting a chip (for masters), then transferring data
* + If there are multiple spi_device children, the i/o queue
* arbitration algorithm is unspecified (round robin, fifo,
* priority, reservations, preemption, etc)
*
* + Chipselect stays active during the entire message
* (unless modified by spi_transfer.cs_change != 0).
* + The message transfers use clock and SPI mode parameters
* previously established by setup() for this device
*/
int (*transfer)(struct spi_device *spi,
struct spi_message *mesg);
/* called on release() to free memory provided by spi_controller */
void (*cleanup)(struct spi_device *spi);
/*
* Used to enable core support for DMA handling, if can_dma()
* exists and returns true then the transfer will be mapped
* prior to transfer_one() being called. The driver should
* not modify or store xfer and dma_tx and dma_rx must be set
* while the device is prepared.
*/
bool (*can_dma)(struct spi_controller *ctlr,
struct spi_device *spi,
struct spi_transfer *xfer);
/*
* These hooks are for drivers that want to use the generic
* controller transfer queueing mechanism. If these are used, the
* transfer() function above must NOT be specified by the driver.
* Over time we expect SPI drivers to be phased over to this API.
*/
bool queued;
struct kthread_worker kworker;
struct task_struct *kworker_task;
struct kthread_work pump_messages;
spinlock_t queue_lock;
struct list_head queue;
struct spi_message *cur_msg; //正在处理的spi_message
bool idling;
bool busy;
bool running;
bool rt;
bool auto_runtime_pm;
bool cur_msg_prepared;
bool cur_msg_mapped;
struct completion xfer_completion;
size_t max_dma_len;
int (*prepare_transfer_hardware)(struct spi_controller *ctlr);
int (*transfer_one_message)(struct spi_controller *ctlr,
struct spi_message *mesg);
int (*slave_abort)(struct spi_controller *ctlr);
/*
* These hooks are for drivers that use a generic implementation
* of transfer_one_message() provied by the core.
*/
void (*set_cs)(struct spi_device *spi, bool enable);
int (*transfer_one)(struct spi_controller *ctlr, struct spi_device *spi,
struct spi_transfer *transfer); //传输的硬件层的实现
void (*handle_err)(struct spi_controller *ctlr,
struct spi_message *message);
/* Optimized handlers for SPI memory-like operations. */
const struct spi_controller_mem_ops *mem_ops;
/* gpio chip select */
int *cs_gpios;
/* statistics */
struct spi_statistics statistics;
/* DMA channels for use with core dmaengine helpers */
struct dma_chan *dma_tx;
struct dma_chan *dma_rx;
/* dummy data for full duplex devices */
void *dummy_rx;
void *dummy_tx;
int (*fw_translate_cs)(struct spi_controller *ctlr, unsigned cs);
};
Linux中使用结构体描述SPI控制器,其中最重要的是transfer函数,它用来手法数据的函数。
2.2 SPI设备的数据结构
相关的源码include\linux\spi\spi.h
struct spi_device {
struct device dev;
struct spi_controller *controller;
struct spi_controller *master; /* compatibility layer */
u32 max_speed_hz;
u8 chip_select;
u8 bits_per_word;
u16 mode;
#define SPI_CPHA 0x01 /* clock phase */
#define SPI_CPOL 0x02 /* clock polarity */
#define SPI_MODE_0 (0|0) /* (original MicroWire) */
#define SPI_MODE_1 (0|SPI_CPHA)
#define SPI_MODE_2 (SPI_CPOL|0)
#define SPI_MODE_3 (SPI_CPOL|SPI_CPHA)
#define SPI_CS_HIGH 0x04 /* chipselect active high? */
#define SPI_LSB_FIRST 0x08 /* per-word bits-on-wire */
#define SPI_3WIRE 0x10 /* SI/SO signals shared */
#define SPI_LOOP 0x20 /* loopback mode */
#define SPI_NO_CS 0x40 /* 1 dev/bus, no chipselect */
#define SPI_READY 0x80 /* slave pulls low to pause */
#define SPI_TX_DUAL 0x100 /* transmit with 2 wires */
#define SPI_TX_QUAD 0x200 /* transmit with 4 wires */
#define SPI_RX_DUAL 0x400 /* receive with 2 wires */
#define SPI_RX_QUAD 0x800 /* receive with 4 wires */
int irq;
void *controller_state;
void *controller_data;
char modalias[SPI_NAME_SIZE];
int cs_gpio; /* chip select gpio */
/* the statistics */
struct spi_statistics statistics;
/*
* likely need more hooks for more protocol options affecting how
* the controller talks to each chip, like:
* - memory packing (12 bit samples into low bits, others zeroed)
* - priority
* - drop chipselect after each word
* - chipselect delays
* - ...
*/
};
三、SPI框架
 SPI控制器是platform框架下的,通过对比"spi-gpio"关键字,匹配到spi_master设备。
SPI控制器是platform框架下的,通过对比"spi-gpio"关键字,匹配到spi_master设备。
然后在probe函数中,解析设备树的子节点。生成spi_device
3.1 SPI控制器驱动程序
SPI控制器可以基于平台总线设备驱动模型来实现:
- 在设备树里描述SPI控制器的硬件信息,在设备树子节点里描述挂在下面的SPI设备信息
- 在platform_dirver中提供一个probe函数
- 它会注册一个spi_master
- 解析设备树子节点,创建spi_device结构体
3.2 SPI设备驱动程序
类似于平台总线驱动模型,Linux有一个SPI总线设备驱动模型
- 左边是spi_driver,使用C文件实现,里面有id_table表示能支持哪些SPI设备,有probe函数
- 右边是spi_device,用来描述SPI设备,比如它的片选引脚、频率
- 可以来自设备树:比如由SPI控制器驱动程序解析设备树后创建、注册spi_device
- 可以来自C文件:比如使用spi_register_board_info创建、注册spi_device

















 1745
1745











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











