







 本文深入探讨了旅行商问题(TSP),包括定义、整数模型(DFJ与MTZ)、行生成模型、近似算法及测试结果。详细解析了各种算法的原理、实现方式与适用范围,对比了不同算法的求解效率与精度。
本文深入探讨了旅行商问题(TSP),包括定义、整数模型(DFJ与MTZ)、行生成模型、近似算法及测试结果。详细解析了各种算法的原理、实现方式与适用范围,对比了不同算法的求解效率与精度。
0、定义
TSP(Traveling Salesman Problem),旅行商问题,又名旅行推销员问题、货郎担问题
假设一个旅行商要拜访n个城市,每个城市只能经过一次,且最后要回到起点,问如何走路程最短
1、整数模型
设cij为第i个点到第j个点的距离,xij表示是否从走到
1.1、DFJ整数模型
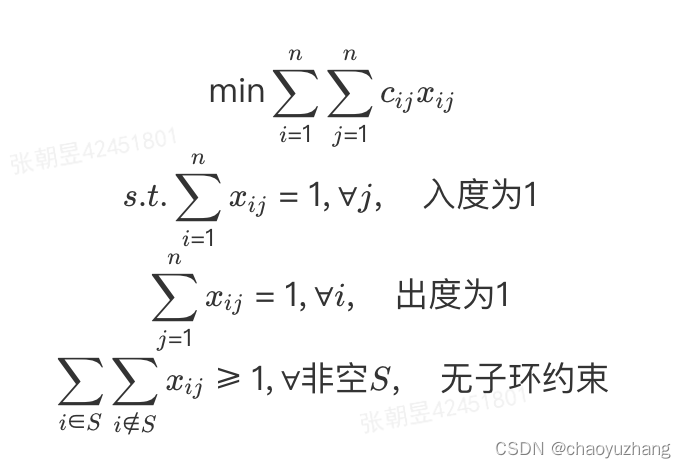
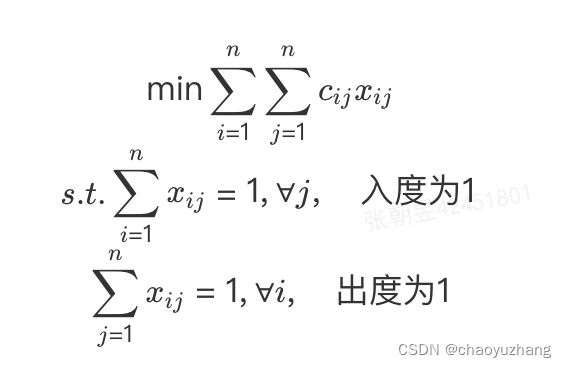
该模型较好理解,前面两个约束保证对每个点入度为1,出度也为1,第三个约束保证每个非空集合到其补集一定有边相连
def TSP_IP_DFJ(Dis, n, time_limit):
model = Model("TSP_IP_DFJ")
A = [[model.addVar(vtype="B", name="A[%s,%s]" % (i, j)) for j in range(n)] for i in range(n)]
# 以总成本最小为目标
model.setObjective(quicksum(Dis[i][j] * A[i][j] for i in range(n) for j in range(n)))
#一度约束
for i in range(n):
model.addCons(quicksum(A[i][j] for j in range(n) if i != j) == 1)
model.addCons(quicksum(A[j][i] for j in range(n) if i != j) == 1)
#无子环约束
SS = subset([i for i in range(n)])
for S in SS:
model.addCons(quicksum(A[i][j] for i in S for j in range(n) if j not in S) >= 1)
# 设置求解时间
model.setRealParam("limits/time", time_limit)
model.optimize()
print("\ngap:", model.getGap())
A1 = [[round(model.getVal(A[i][j])) for j in range(n)] for i in range(n)]
return A11.2、MTZ整数模型
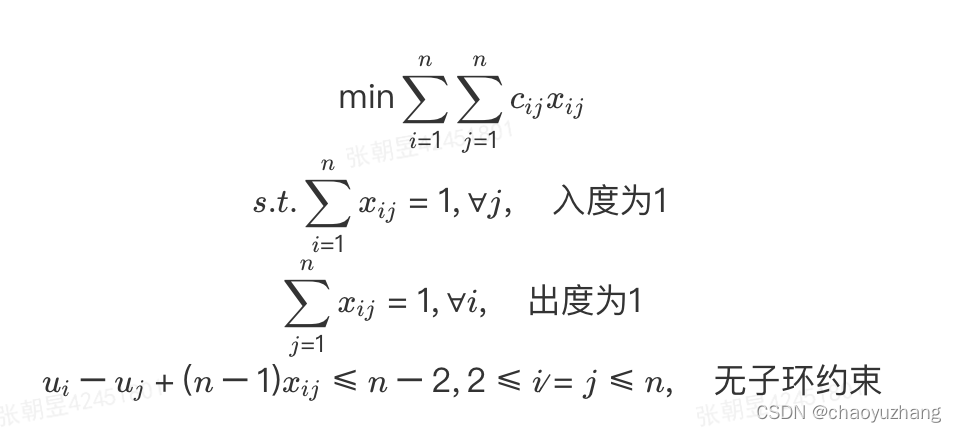
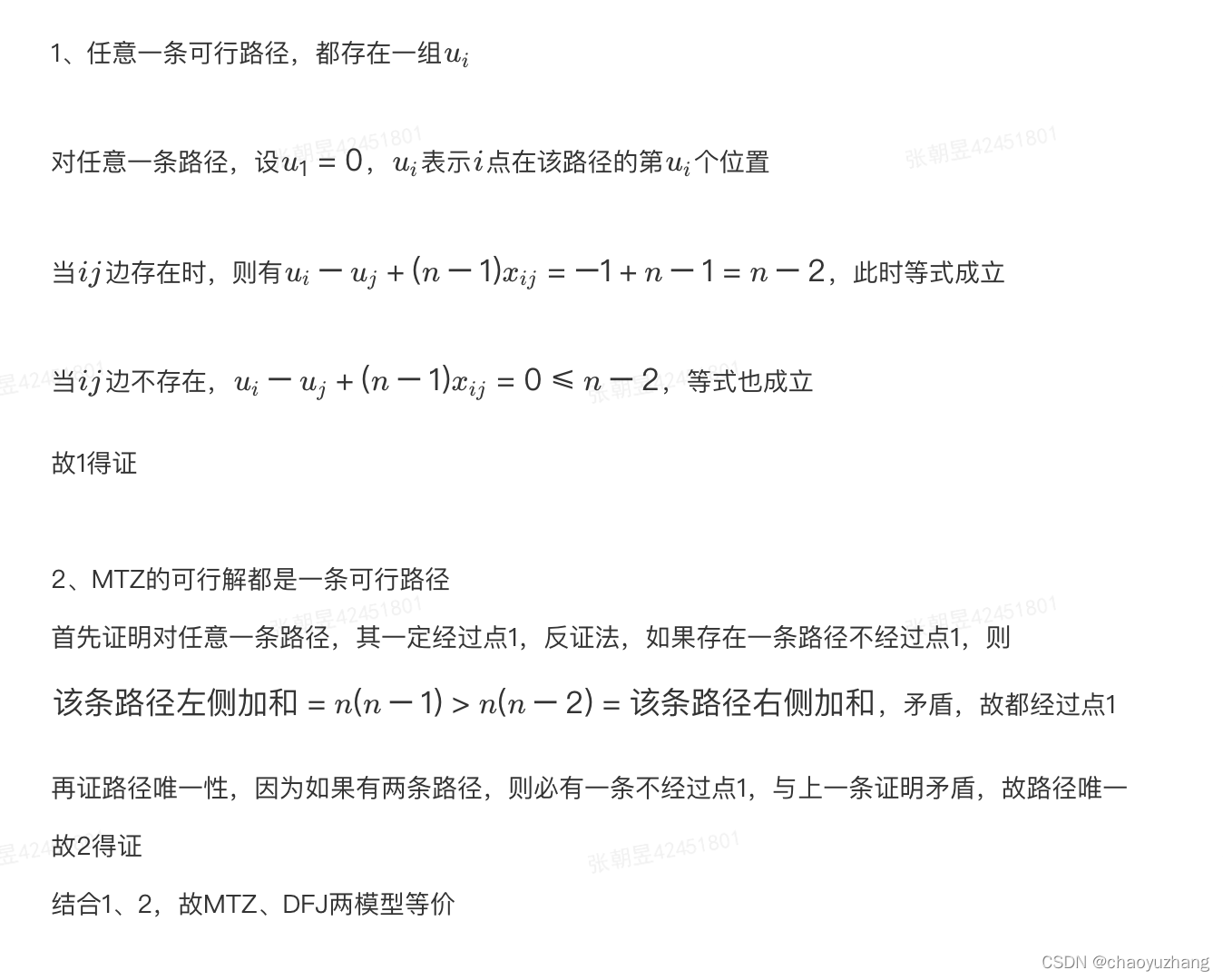
两个模型区别在于无子环约束形式的不同,下面证明两者等价
证明
MTZ模型的好处在于其约束相较于DFJ明显变少(2^n到n^2)
def TSP_IP_MTZ(Dis, n, time_limit):
model = Model("TSP_IP_MTZ")
A = [[model.addVar(vtype="B", name="A[%s,%s]" % (i, j)) for j in range(n)] for i in range(n)]
U = [model.addVar(name="U[%s]"%i) for i in range(n)]
# 以总成本最小为目标
model.setObjective(quicksum(Dis[i][j] * A[i][j] for i in range(n) for j in range(n)))
# 一度约束
for i in range(n):
model.addCons(quicksum(A[i][j] for j in range(n) if i != j) == 1)
model.addCons(quicksum(A[j][i] for j in range(n) if i != j) == 1)
#MTZ无子环约束
for i in range(1, n):
for j in range(1, n):
if i != j:
model.addCons(U[i]-U[j]+(n-1)*A[i][j] <= n-2)
# 设置求解时间
model.setRealParam("limits/time", time_limit)
model.optimize()
print("\ngap:", model.getGap())
A1 = [[round(model.getVal(A[i][j])) for j in range(n)] for i in range(n)]
return A11.3、行生成模型
这里先解上面其松弛模型,再判定解是否满足条件,再不断添加不满足的约束,添加约束的方案一般为约束已生成的子环不会发生,下面列举一些方法
让其与补集有边相连,或让其内部连边不够,代码块里通过type区分(精确解)
1.3.1、多次调用模式
-
def sub_TSP_row_generate(Dis, n, L_S, time_limit, type=2): model = Model("sub_TSP_row_generate") A = [[model.addVar(vtype="B", name="A[%s,%s]" % (i, j)) for j in range(n)] for i in range(n)] # 以总成本最小为目标 model.setObjective(quicksum(Dis[i][j] * A[i][j] for i in range(n) for j in range(n))) # 一度约束 for i in range(n): model.addCons(quicksum(A[i][j] for j in range(n) if i != j) == 1) model.addCons(quicksum(A[j][i] for j in range(n) if i != j) == 1) #两个方向限制不生成已有的子环 if type == 1: #该集合与补集有边相连 for S in L_S: model.addCons(quicksum(A[i][j] for i in S for j in range(n) if j not in S) >= 1) model.addCons(quicksum(A[j][i] for i in S for j in range(n) if j not in S) >= 1) else: #该集合内部边不够 for S in L_S: model.addCons(quicksum(A[i][j] for i in S for j in S if i != j) <= len(S)-1) # 设置求解时间 model.setRealParam("limits/time", time_limit) model.optimize() print("\ngap:", model.getGap()) A1 = [[round(model.getVal(A[i][j])) for j in range(n)] for i in range(n)] return A1 def TSP_IP_row_generate(Dis, n, time_limit): L_S = [] ring_sub = True while ring_sub: ring_sub = False A = sub_TSP_row_generate(Dis, n, L_S, time_limit) D = {i:j for i in range(n) for j in range(n) if A[i][j] == 1} S = {0} a = 0 while len(S) < n: b = D[a] if b in S: L_S.append(S) ring_sub = True break else: S.add(b) a = b if not ring_sub: return A
1.3.2、freeTransform模式
-
def LL_A_generate(A): LL_A = [[i] for i in range(len(A))] D = {i: i for i in range(len(A))} for i in range(len(A)): for j in range(len(A[i])): if A[i][j] == 1 and D[i] != D[j]: index_min = min(D[i], D[j]) index_max = max(D[i], D[j]) LL_A[index_min] = LL_A[index_min] + LL_A[index_max] del LL_A[index_max] for k in D: if D[k] > index_max: D[k] -= 1 for k in LL_A[index_min]: D[k] = index_min return LL_A def TSP_IP_exact(points, Dis, time_limit=1000, type=2): n = len(Dis) model = Model("TSP_IP_exact") model.hideOutput() A = [[model.addVar(ub=1, name="A[%s,%s]" % (i, j)) for j in range(n)] for i in range(n)] # 以总成本最小为目标 model.setObjective(quicksum(Dis[i][j] * A[i][j] for i in range(n) for j in range(n) if i != j), "minimize") for i in range(n): for j in range(n): if i == j: model.addCons(A[i][j] == 0) else: model.addCons(A[i][j] <= 1) model.addCons(A[i][j] >= 0) for i in range(n): model.addCons(quicksum(A[i][j] for j in range(n) if i != j) == 1) model.addCons(quicksum(A[j][i] for j in range(n) if i != j) == 1) # 设置求解时间 model.setRealParam("limits/time", time_limit) EPS = 1.e-6 loop = 0 isMIP = False while True: loop += 1 print("精确求解第", loop, "次迭代") model.optimize() if not isMIP: A1 = [[1 if model.getVal(A[i][j]) > EPS else 0 for j in range(n)] for i in range(n)] else: A1 = [[round(model.getVal(A[i][j])) for j in range(n)] for i in range(n)] LL_A = LL_A_generate(A1) if loop % 10 == 0: A2 = [[A1[i][j] if i < j else 0 for j in range(n)] for i in range(n)] A_plot(points, A2, x_min, y_min, x_max, y_max) if len(LL_A) == 1: if not isMIP: print("转为MIP") model.freeTransform() for i in range(len(A)): for j in range(len(A[i])): model.chgVarType(A[i][j], "B") isMIP = True continue else: break model.freeTransform() # 已测试过的不能在一起的点,避免再次得到 if type == 1: for S in LL_A: model.addCons(quicksum(A[i][j] for i in S for j in range(n) if j not in S) >= 1) else: for S in LL_A: model.addCons(quicksum(A[i][j] for i in S for j in S if i != j) <= len(S) - 1) return A1
1.3.3、freeTransform和networkx模式
-
def solve_tsp(V, c, type=1): def addcut(cut_edges): G = networkx.Graph() G.add_edges_from(cut_edges) Components = list(networkx.connected_components(G)) if len(Components) == 1: return False model.freeTransform() if type == 1: # 该集合与补集有边相连 for S in Components: model.addCons(quicksum(x[i, j] for i in S for j in V if j not in S) >= 1) print("cut: %s 与其补集相连" % (S)) else: # 该集合内部边不够 for S in Components: model.addCons(quicksum(x[i, j] for i in S for j in S if j != i) <= len(S) - 1) print("cut: len(%s) <= %s" % (S, len(S) - 1)) return True def addcut2(cut_edges): G = networkx.Graph() G.add_edges_from(cut_edges) Components = list(networkx.connected_components(G)) if len(Components) == 1: return False model.freeTransform() for S in Components: T = set(V) - set(S) print("S:", S) print("T:", T) model.addCons(quicksum(x[i, j] for i in S for j in T if j > i) + quicksum(x[i, j] for i in T for j in S if j > i) >= 2) print("cut: %s >= 2" % "+".join([("x[%s,%s]" % (i, j)) for i in S for j in T if j > i])) return True model = Model("tsp") x = {} for i in V: for j in V: x[i, j] = model.addVar(ub=1, name="x(%s,%s)" % (i, j)) for i in V: model.addCons(quicksum(x[i, j] for j in V if j != i) == 1, "OutDegree(%s)" % i) model.addCons(quicksum(x[j, i] for j in V if j != i) == 1, "InDegree(%s)" % i) model.setObjective(quicksum(c[i, j] * x[i, j] for i in V for j in V if j != i), "minimize") EPS = 1.e-6 isMIP = False while True: model.optimize() edges = [] for (i, j) in x: if model.getVal(x[i, j]) > EPS: edges.append((i, j)) if addcut(edges) == False: if isMIP: # integer variables, components connected: solution found break model.freeTransform() for (i, j) in x: # all components connected, switch to integer model model.chgVarType(x[i, j], "B") isMIP = True return model.getObjVal(), edges def TSP_IP_exact_official(points, Dis): nums = len(points) V = range(1, nums + 1) c = {(i, j): Dis[i - 1][j - 1] for i in range(1, nums + 1) for j in range(1, nums + 1)} obj, edges = solve_tsp(V, c) A = [[0 for j in range(nums)] for i in range(nums)] for edge in edges: A[edge[0] - 1][edge[1] - 1] = 1 return A
1.3.4、最短的边破除该子环(启发式,效果一般)
-
def sub_TSP_row_generate_heuristic(Dis, n, pairs_must, time_limit): model = Model("sub_TSP_row_generate_heuristic") A = [[model.addVar(vtype="B", name="A[%s,%s]" % (i, j)) for j in range(n)] for i in range(n)] # 以总成本最小为目标 model.setObjective(quicksum(Dis[i][j] * A[i][j] for i in range(n) for j in range(n))) # 一度约束 for i in range(n): model.addCons(quicksum(A[i][j] for j in range(n) if i != j) == 1) model.addCons(quicksum(A[j][i] for j in range(n) if i != j) == 1) #把要连的边连上 for pair in pairs_must: i, j = pair[0], pair[1] model.addCons(A[i][j]+A[j][i] == 1) # 设置求解时间 model.setRealParam("limits/time", time_limit) model.optimize() print("\ngap:", model.getGap()) A1 = [[round(model.getVal(A[i][j])) for j in range(n)] for i in range(n)] return A1 def TSP_IP_row_generate_heuristic(points, Dis, n, time_limit): pairs = pair_points_generate(Dis) pairs_must = set() ring_sub = True used = {i:0 for i in range(n)} while ring_sub: ring_sub = False A = sub_TSP_row_generate_heuristic(Dis, n, pairs_must, time_limit) D = {i:j for i in range(n) for j in range(n) if A[i][j] == 1} S = {0} a = 0 while len(S) < n: b = D[a] #若生成子环,则将最短破圈边加入 if b in S: ring_sub = True for pair in pairs: i, j = pair[0], pair[1] if ((i in S and j not in S) or (i not in S and j in S)) and used[i] <= 1 and used[j] <= 1: pairs_must.add((i, j)) used[i] += 1 used[j] += 1 break break else: S.add(b) a = b A = deal_overlap(points, A) A = Undirected_to_directed(A) return A
2、近似算法
2.1、插入法
该方法很直观,从一个点开始,不断的把最近的邻居加进来
#近邻插入
def TSP_nearest(points, Dis):
n = len(Dis)
S = [0 for i in range(len(Dis))]
T = [1 for i in range(len(Dis))]
# 加入第一个点
route = [0]
S[0] = 1
T[0] = 0
# 开始加点
while sum(T) > 0:
u = route[-1]
nexts = [i for i in range(n) if S[i] == 0]
v = nexts[0]
for j in range(1, len(nexts)):
if Dis[u][v] > Dis[u][nexts[j]]:
v = nexts[j]
route.append(v)
S[v] = 1
T[v] = 0
A = [[0 for j in range(n)] for i in range(n)]
for i in range(len(route) - 1):
A[route[i]][route[i + 1]] = 1
A[route[i + 1]][route[i]] = 1
A[route[0]][route[-1]] = 1
A[route[-1]][route[0]] = 1
A = deal_overlap(points, A)
return A2.2、凸包插入法
先把所有点的凸包算出来,然后把剩余点以损失最小的方式插入路径中
#先着凸包,再插入
def TSP_insert(points, Dis):
# 每个坐标对应的索引
D = {}
for p in points:
D[p[0]] = p[1:]
ps = list(D.values())
b = boundary_find(ps)
route = []
for p in b:
idex = list(D.keys())[list(D.values()).index(p)]
if idex not in route:
route.append(idex)
S = [i for i in range(len(points)) if i not in route]
while len(S) > 0:
costs = [[Dis[route[-1]][S[i]] + Dis[S[i]][route[0]] - Dis[route[-1]][route[0]]] + [
Dis[route[j]][S[i]] + Dis[S[i]][route[j + 1]] - Dis[route[j]][route[j + 1]] for j in range(len(route) - 1)]
for i in range(len(S))]
new, idex = 0, 0
for i in range(len(S)):
for j in range(len(route)):
if costs[i][j] < costs[new][idex]:
new, idex = i, j
route.insert(idex, S[new])
del S[new]
n = len(points)
A = [[0 for j in range(n)] for i in range(n)]
for i in range(len(route) - 1):
A[route[i]][route[i + 1]] = 1
A[route[i + 1]][route[i]] = 1
A[route[0]][route[-1]] = 1
A[route[-1]][route[0]] = 1
A = deal_overlap(points, A)
return A2.3、2-opt
随机初始化,不断的交换两个点的位置,更短则更新
#2-opt
def TSP_2_opt(points, Dis):
route = [i for i in range(len(points))]
n = len(points)
flag = 1
while flag == 1:
flag = 0
for i in range(n - 1):
for j in range(i + 1, n):
route1 = copy.deepcopy(route)
route1[i], route1[j] = route1[j], route1[i]
if sub_k_opt(route, Dis) > sub_k_opt(route1, Dis):
route = route1
flag = 1
break
if flag == 1:
break
A = [[0 for j in range(n)] for i in range(n)]
for i in range(len(route) - 1):
A[route[i]][route[i + 1]] = 1
A[route[i + 1]][route[i]] = 1
A[route[0]][route[-1]] = 1
A[route[-1]][route[0]] = 1
A = deal_overlap(points, A)
return A2.4、3-opt
在2-opt的基础上,多加入一个换的点
def TSP_3_opt(points, Dis):
route = [i for i in range(len(points))]
n = len(points)
flag = 1
while flag == 1:
flag = 0
for i in range(n - 2):
for j in range(i + 1, n - 1):
for k in range(j + 1, n):
route1, route2, route3, route4, route5 = copy.deepcopy(route), copy.deepcopy(route), copy.deepcopy(
route), copy.deepcopy(route), copy.deepcopy(route)
route1[i], route1[j], route1[k] = route1[i], route1[k], route1[j]
route2[i], route2[j], route2[k] = route2[j], route2[i], route2[k]
route3[i], route3[j], route3[k] = route3[j], route3[k], route3[i]
route4[i], route4[j], route4[k] = route4[k], route4[i], route4[j]
route5[i], route5[j], route5[k] = route5[k], route5[j], route5[i]
if sub_k_opt(route, Dis) > sub_k_opt(route1, Dis):
route = route1
flag = 1
if sub_k_opt(route, Dis) > sub_k_opt(route2, Dis):
route = route2
flag = 1
if sub_k_opt(route, Dis) > sub_k_opt(route3, Dis):
route = route3
flag = 1
if sub_k_opt(route, Dis) > sub_k_opt(route4, Dis):
route = route4
flag = 1
if sub_k_opt(route, Dis) > sub_k_opt(route5, Dis):
route = route5
flag = 1
if flag == 1:
break
if flag == 1:
break
if flag == 1:
break
A = [[0 for j in range(n)] for i in range(n)]
for i in range(len(route) - 1):
A[route[i]][route[i + 1]] = 1
A[route[i + 1]][route[i]] = 1
A[route[0]][route[-1]] = 1
A[route[-1]][route[0]] = 1
A = deal_overlap(points, A)
return A2.5、SA
引入模拟退火思想,一定程度接受质量不高的解
def TSP_SA(points, Dis):
route = [i for i in range(len(points))]
n = len(points)
T = 1000 * sub_k_opt(route, Dis)
T0 = 1
alpha = 0.99
flag = 0
limit = n * math.log(n)
loop = 0
while flag < limit or T <= T0:
loop += 1
if loop % 10 == 0:
print("模拟退火进行至:", loop)
i = int(rd.random() * (n - 1))
j = int(rd.random() * (n - i - 1)) + i + 1
route1 = copy.deepcopy(route)
route1[i], route1[j] = route1[j], route1[i]
if sub_k_opt(route, Dis) > sub_k_opt(route1, Dis):
route = route1
T = T * alpha
flag = 0
else:
dc = sub_k_opt(route1, Dis) - sub_k_opt(route, Dis)
if math.exp(-dc / T) > rd.random():
route = route1
T = T * alpha
flag = 0
else:
flag += 1
A = [[0 for j in range(n)] for i in range(n)]
for i in range(len(route) - 1):
A[route[i]][route[i + 1]] = 1
A[route[i + 1]][route[i]] = 1
A[route[0]][route[-1]] = 1
A[route[-1]][route[0]] = 1
A = deal_overlap(points, A)
return A3、测试结果
3.1、各方法适用范围
| 方法 | 类型 | 适用规模 |
|---|---|---|
| DFJ | 精确解 | 0-15 |
| MTZ | 精确解 | 0-80 |
| row_generate | 精确解 | 0-20 |
| row_generate_heuristic | 近似解 | 0-100 |
| exact | 精确解 | 0-150 |
| exact_official | 精确解 | 0-150 |
| nearest | 近似解 | 0- |
| insert | 近似解 | 0- |
| 2-opt | 近似解 | 0- |
| 3-opt | 近似解 | 0- |
| SA | 近似解 | 0- |
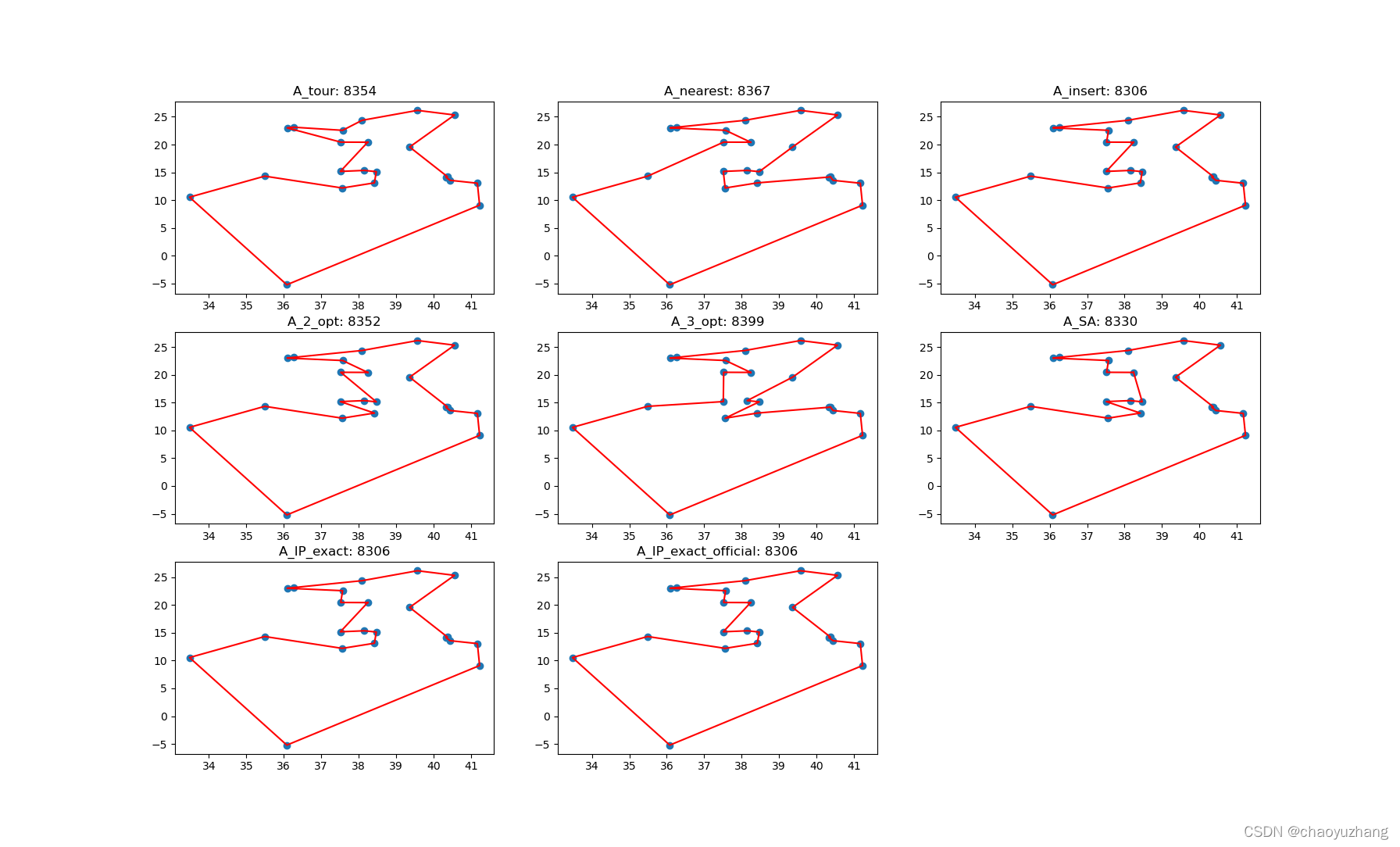
3.2、测试结果
这里采用公共数据集中有最优解的case测试,总体来说凸包插入法在求解效率(秒级别出结果)和求解精度(gap4.43%)上表现较好
| 测试集 | 最优解 | 近邻插入 | gap | 时间 | 凸包插入 | gap | 时间 |
|---|---|---|---|---|---|---|---|
| avg | 8.44% | 3.34 | 4.43% | 3.29 | |||
| gr96 | 54490.06 | 58973.96 | 8.23% | 0.35 | 57667.75 | 5.83% | 0.26 |
| rd100 | 7910.40 | 9100.26 | 15.04% | 0.27 | 8430.03 | 6.57% | 0.30 |
| pcb442 | 50783.55 | 58982.04 | 16.14% | 9.54 | 56156.01 | 10.58% | 10.91 |
| lin105 | 14383.00 | 18027.89 | 25.34% | 0.37 | 14632.23 | 1.73% | 0.33 |
| tsp225 | 3859.00 | 4275.93 | 10.80% | 2.02 | 4377.07 | 13.42% | 1.94 |
| gr666 | 321086.46 | 338140.02 | 5.31% | 53.76 | 345173.00 | 7.50% | 50.96 |
| ch130 | 6110.86 | 6791.31 | 11.14% | 0.56 | 6656.10 | 8.92% | 0.55 |
| bays29 | 2020.00 | 2030.00 | 0.50% | 0.02 | 2044.00 | 1.19% | 0.03 |
| berlin52 | 7544.37 | 8244.83 | 9.28% | 0.08 | 8069.84 | 6.97% | 0.09 |
| eil51 | 429.98 | 455.94 | 6.04% | 0.06 | 452.17 | 5.16% | 0.09 |
| ulysses16 | 8182.20 | 8176.38 | -0.07% | 0.01 | 8179.44 | -0.03% | 0.01 |
| kroD100 | 21294.29 | 23441.23 | 10.08% | 0.40 | 21676.43 | 1.79% | 0.25 |
| gr202 | 60350.21 | 56023.71 | -7.17% | 1.33 | 55704.01 | -7.70% | 1.51 |
| ch150 | 6532.28 | 7531.63 | 15.30% | 0.76 | 6952.56 | 6.43% | 0.73 |
| a280 | 2586.77 | 2920.05 | 12.88% | 2.89 | 2812.68 | 8.73% | 3.39 |
| pr76 | 108159.44 | 115930.23 | 7.18% | 0.13 | 113672.76 | 5.10% | 0.17 |
| ulysses22 | 8354.99 | 8496.75 | 1.70% | 0.02 | 8306.20 | -0.58% | 0.02 |
| kroC100 | 20750.76 | 23680.51 | 14.12% | 0.27 | 20871.38 | 0.58% | 0.28 |
| eil76 | 545.39 | 578.42 | 6.06% | 0.13 | 572.82 | 5.03% | 0.13 |
| eil101 | 642.31 | 672.74 | 4.74% | 0.34 | 671.68 | 4.57% | 0.28 |
| att48 | 10628.00 | 11148.00 | 4.89% | 0.06 | 10859.00 | 2.17% | 0.06 |
| st70 | 678.60 | 734.53 | 8.24% | 0.13 | 702.50 | 3.52% | 0.16 |
| bayg29 | 1610.00 | 1708.00 | 6.09% | 0.03 | 1610.00 | 0.00% | 0.03 |
对比图

















 3174
3174

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









