









嵌入式通信协议学习——IIC篇
前言
我们下面就是来仔细的聊一聊IIC通信协议。回顾一下通信协议存在的目的,就是为了让两个物理甚至是逻辑不同的电路模块进行信息交换,为了让信息的交换存在可能,我们自然会选择让双方都遵守一个君子协定,这个君子协定就是“通信协议”。我们
简单说一说什么是IIC
我们下面就来聊聊什么是IIC,IIC的全称是:Inter-Integrated Circuit。它是一种由飞利浦公司在1980年代初开发的串行通信协议(通信由主设备提供时钟信号(SCL)进行同步,确保数据在正确的时序下传输),旨在简化微控制器与外围设备之间的连接。它采用两线制设计,仅需一根串行数据线(SDA)和一根串行时钟线(SCL),即可实现多设备之间的通信。这种设计不仅减少了引脚数量,还降低了系统的复杂性和成本。这个说法是相对于线的使用上相对豪横的SPI的,SPI会在后续的文章中笔者详细的进行介绍,但是不是现在。
IIC依赖于本次通信时谁是主动方(主动的发送数据)和谁是被动方(被动的接受数据)划分出来了IIC主机和IIC从机。有趣的是,IIC是支持多主机多从机的,这是我们下面中,IIC的具体的通信细节中我们还会再聊的内容。
IIC通信绘景与细节特征
这个小节中,我们才会认真的理解IIC到底是如何工作的。在我们勾勒具体的细节之前,最好是有一个大纲。
下图就把IIC的绘景说清楚了(图的来源:[A Basic Guide to I2C]
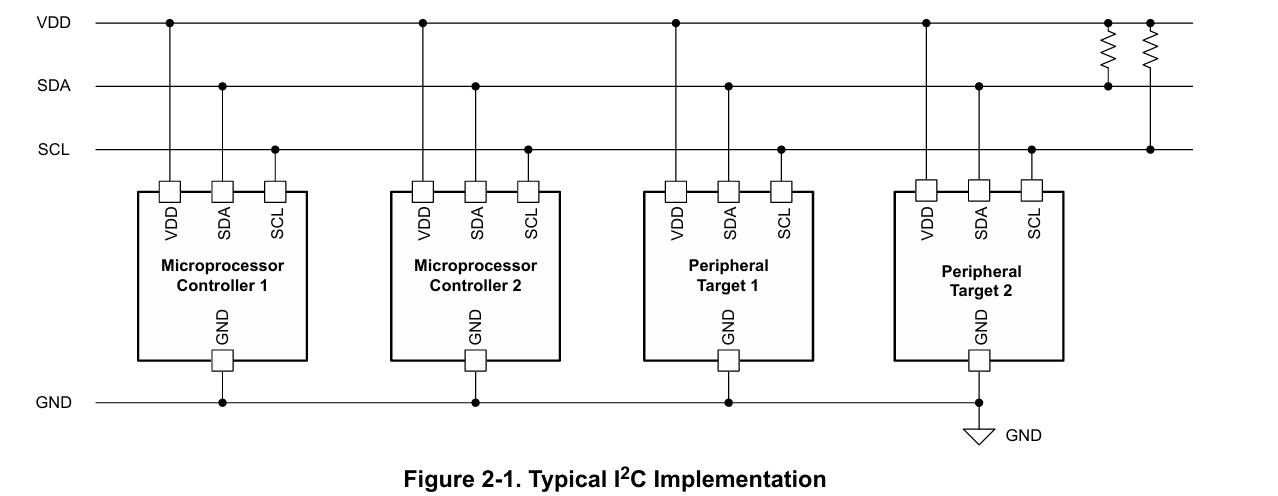
可以看到,我们的所有设备都存在相同的GND和VCC,确保这一蔟设备中对0和1的定义都是一致的,有趣的是如下的特性:
- 这个图笃定了我在摘要中谈到的,I²C 使用两根线进行通信:串行数据线(SDA)和串行时钟线(SCL)。对于这两根线都是双向开漏连接,需要上拉电阻(外部供电上拉),以确保线路在空闲时为高电平,这种设计允许多个设备同时连接到总线,避免了信号冲突。
- IIC对于多个主设备和从设备的支持体现是通过唯一的设备地址,或者说,我们能找到一个IIC设备,不与其他设备进行混淆,全靠IIC设备地址,主设备通过发送目标设备的地址来发起通信。IIC 使用 7 位或 10 位地址空间,理论上支持最多 128 个或 1024 个设备,但实际应用中,地址冲突和总线电容限制了设备数量。
- IIC 是一种半双工协议,意味着数据可以在两个方向上传输,但不能同时进行。是的,写代码的朋友都知道,当我们对一个IIC设备进行通信的时候,我们往往不能够对同一个设备进行同时的读写
- IIC 支持多种传输速率,包括标准模式(100 kbps)、快速模式(400 kbps)、高速模式(3.4 Mbps)和超高速模式(5 Mbps)。
IIC通信流程说明
我们下面就来说明一下IIC的一个通信流程。
通信开始前,总线处于空闲状态,SDA和SCL均为高电平。主设备通过生成起始条件启动通信:在SCL为高电平时,SDA从高电平跳变为低电平。起始条件后,主设备发送地址帧。地址帧包含7位从设备地址和1位读写控制位(共8位)。读写位为0时表示主设备向从设备写入数据,为1时表示读取数据。例如,若从设备地址为0x50且主设备要写入数据,地址帧为0xA0(0x50左移1位后补0)。
每传输完一个字节(8位),接收方需在第9个时钟周期发送应答信号。若接收方成功接收数据,会将SDA线拉低(ACK);若接收失败或要求终止传输,SDA保持高电平(NACK)。若从设备未对地址帧返回ACK,主设备可发送停止条件终止通信。
地址帧确认后,数据传输根据读写方向进行。写入模式下,主设备依次发送数据字节,每发送一字节后等待从设备的ACK;读取模式下,从设备发送数据字节,主设备每接收一字节后返回ACK(继续接收)或NACK(终止接收)。通信结束时,主设备发送停止条件:在SCL为高电平时,SDA从低电平跳变为高电平。
以主设备向地址0x50的从设备写入数据0xAA为例:主设备首先发送起始条件,接着发送地址帧0xA0;从设备返回ACK后,主设备发送数据0xAA,从设备再次返回ACK;最后主设备发送停止条件结束通信。若需连续操作(如先写寄存器地址再读数据),主设备可在不发送停止条件时插入重复起始条件,直接开启新操作。
当多个主设备同时操作时,SCL线通过“线与”逻辑合并时钟信号,以最慢时钟为准;若多主设备同时发送数据,SDA线上先释放高电平的一方退出仲裁,避免冲突。协议支持不同速度模式,包括标准模式(100kbps)、快速模式(400kbps)和高速模式(3.4Mbps)。对于10位地址扩展,主设备需先发送特殊前缀(0b11110XX),再发送完整地址的两个字节。
HAL库的API说明
1. 主机模式通信
-
HAL_I2C_Master_Transmit()
用于主设备向从设备发送数据。函数原型:
HAL_StatusTypeDef HAL_I2C_Master_Transmit(I2C_HandleTypeDef *hi2c,
uint16_t DevAddress,
uint8_t *pData,
uint16_t Size,
uint32_t Timeout);
参数说明:
hi2c:指向 I2C 句柄的指针。DevAddress:目标设备地址(7 位地址左移 1 位)。pData:指向要发送的数据缓冲区的指针。Size:要发送的数据长度。Timeout:超时时间(毫秒)。
示例:
uint8_t data[] = {0x01, 0x02};
HAL_I2C_Master_Transmit(&hi2c1, (0x40 << 1), data, 2, HAL_MAX_DELAY);
-
HAL_I2C_Master_Receive()
用于主设备从从设备接收数据。函数原型:
HAL_StatusTypeDef HAL_I2C_Master_Receive(I2C_HandleTypeDef *hi2c,
uint16_t DevAddress,
uint8_t *pData,
uint16_t Size,
uint32_t Timeout);
参数说明:
hi2c:指向 I2C 句柄的指针。DevAddress:目标设备地址(7 位地址左移 1 位)。pData:指向接收数据缓冲区的指针。Size:要接收的数据长度。Timeout:超时时间(毫秒)。
示例:
uint8_t buffer[10];
HAL_I2C_Master_Receive(&hi2c1, (0x40 << 1), buffer, 10, HAL_MAX_DELAY);
2. 内存读写操作
-
HAL_I2C_Mem_Write()
用于向从设备的特定内存地址写入数据。函数原型:
HAL_StatusTypeDef HAL_I2C_Mem_Write(I2C_HandleTypeDef *hi2c,
uint16_t DevAddress,
uint16_t MemAddress,
uint16_t MemAddSize,
uint8_t *pData,
uint16_t Size,
uint32_t Timeout);
参数说明:
hi2c:指向 I2C 句柄的指针。DevAddress:目标设备地址(7 位地址左移 1 位)。MemAddress:目标内存地址。MemAddSize:内存地址大小(I2C_MEMADD_SIZE_8BIT或I2C_MEMADD_SIZE_16BIT)。pData:指向要写入的数据缓冲区的指针。Size:要写入的数据长度。Timeout:超时时间(毫秒)。
示例:
uint8_t data = 0x55;
HAL_I2C_Mem_Write(&hi2c1, (0x50 << 1), 0x10, I2C_MEMADD_SIZE_8BIT, &data, 1, HAL_MAX_DELAY);
-
HAL_I2C_Mem_Read()
用于从从设备的特定内存地址读取数据。函数原型:
HAL_StatusTypeDef HAL_I2C_Mem_Read(I2C_HandleTypeDef *hi2c,
uint16_t DevAddress,
uint16_t MemAddress,
uint16_t MemAddSize,
uint8_t *pData,
uint16_t Size,
uint32_t Timeout);
参数说明:
hi2c:指向 I2C 句柄的指针。DevAddress:目标设备地址(7 位地址左移 1 位)。MemAddress:目标内存地址。MemAddSize:内存地址大小(I2C_MEMADD_SIZE_8BIT或I2C_MEMADD_SIZE_16BIT)。pData:指向接收数据缓冲区的指针。Size:要读取的数据长度。Timeout:超时时间(毫秒)。
示例:
uint8_t buffer;
HAL_I2C_Mem_Read(&hi2c1, (0x50 << 1), 0x10, I2C_MEMADD_SIZE_8BIT, &buffer, 1, HAL_MAX_DELAY);
3. 非阻塞模式(中断和 DMA)
为了提高效率,HAL 库还提供了非阻塞的中断和 DMA 模式的 API,例如:
- 中断模式:
HAL_I2C_Master_Transmit_IT()HAL_I2C_Master_Receive_IT()HAL_I2C_Mem_Write_IT()HAL_I2C_Mem_Read_IT()
- DMA 模式:
HAL_I2C_Master_Transmit_DMA()HAL_I2C_Master_Receive_DMA()HAL_I2C_Mem_Write_DMA()HAL_I2C_Mem_Read_DMA()
这些函数的参数与其阻塞模式的对应函数类似,但在调用后不会阻塞主程序,而是通过中断或 DMA 完成数据传输。使用这些函数时,需要实现相应的回调函数,如 HAL_I2C_MasterTxCpltCallback()、HAL_I2C_MasterRxCpltCallback() 等,以处理传输完成后的操作。(disca.upv.es)
Reference
- I2C Communication Protocol | GeeksforGeeks
- I2C-bus specification and user manual - NXP Semiconductors
on Protocol | GeeksforGeeks](https://www.geeksforgeeks.org/i2c-communication-protocol/) - I2C-bus specification and user manual - NXP Semiconductors
- A Basic Guide to I2C - Texas Instruments


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









