






手上的没有可以用的树莓派 泰山派这样的卡片电脑,但是又想用opencv+ip摄像头来识别信号再利用单片机控制,但是呢用串口将电脑上图像识别做出的判断信息发送给电脑的话,我的小车上就得拖着一根而且比较长的串口通信线,所以为了避免物理连接选择使用蓝牙串口来传输,但是手头上又HC-08 和HC-05,两者的协议不同又不能通信,而且需要usb转串口才能连接进电脑端,所以想用笔记本内置的蓝牙连接和发送
win11 : 设置> 蓝牙和其他设备 > 显示更多设备 >
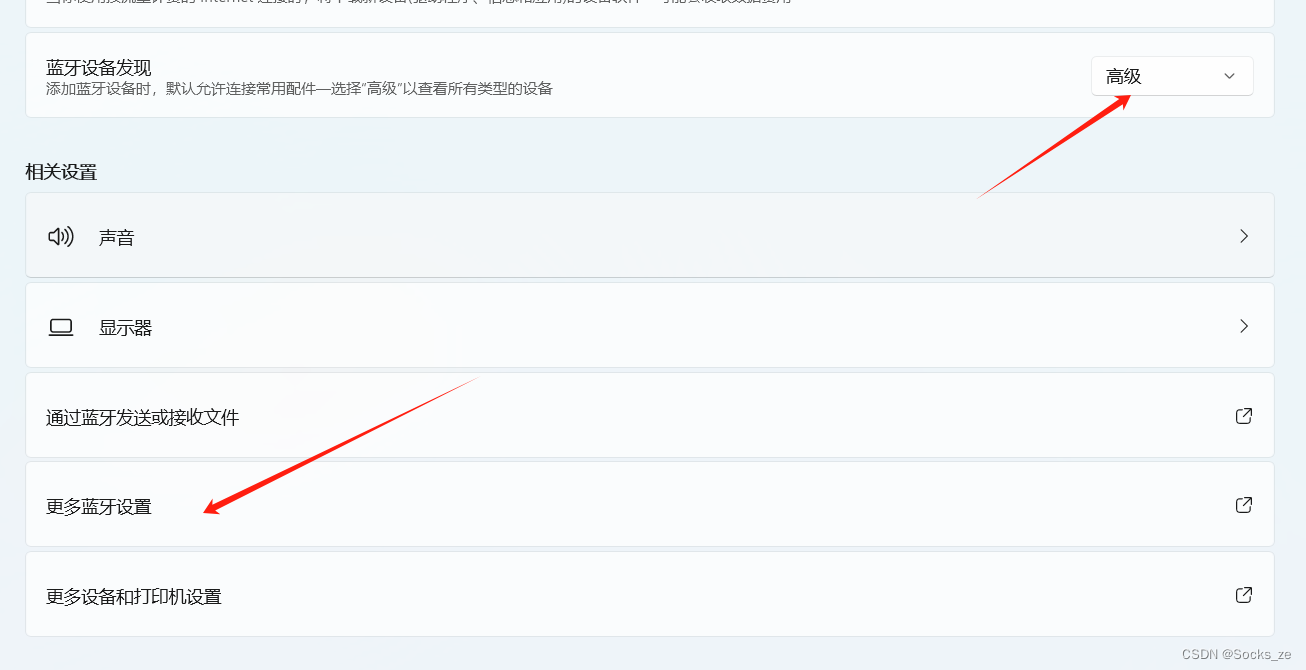
这里首先是把蓝牙设备发现给改成高级,不然可能会识别不到我们的蓝牙模块
然后更多蓝牙设置: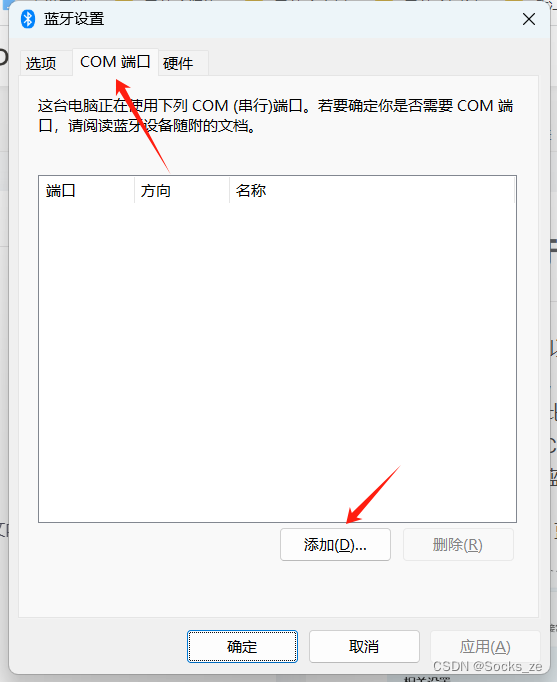
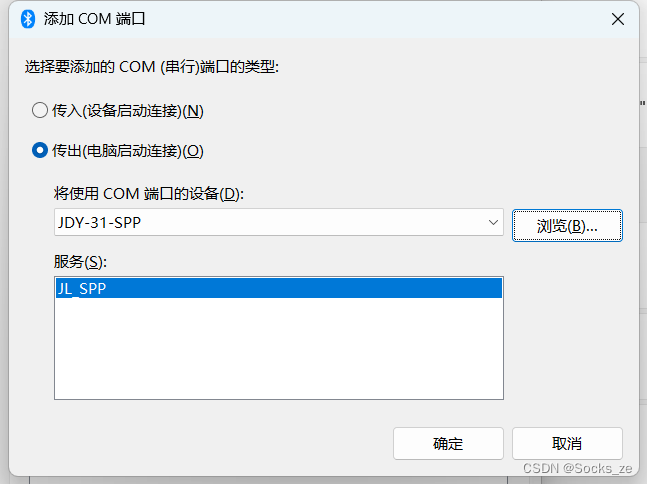
然后添加一个输出com,浏览然后选择要连接的蓝牙设备

import serial
# 打开串口
ser = serial.Serial('COM6', 9600) # 根据实际串口号和波特率进行更改
# 发送数据
data_to_send = b'10' # 将要发送的数据,需转换为 bytes 类型
ser.write(data_to_send)
# 关闭串口
ser.close()
基础上可以调用ip摄像头去识别
import cv2
import numpy as np
import serial
#修改建议:改为多线程
# 打开串口
ser = serial.Serial('COM3', 9600) # 根据实际串口号和波特率进行更改
# 初始化摄像头
url = "rtsp://admin:admin@10.105.191.133:8554/live"
while(True):
# 读取一帧视频
cap = cv2.VideoCapture(url)
ret, frame = cap.read()
cap.set(3, 320) # 设置摄像头输出宽
cap.set(4, 240) # 设置摄像头输出高
# 将当前帧转换为HSV颜色空间
hsv = cv2.cvtColor(frame, cv2.COLOR_BGR2HSV)
# 设置要检测的橙色乒乓球的颜色范围
lower_orange = np.array([15, 150, 50])
upper_orange = np.array([30, 220, 255])
# 根据颜色范围创建掩模
mask = cv2.inRange(hsv, lower_orange, upper_orange)
# 寻找乒乓球的轮廓
contours, _ = cv2.findContours(mask, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
# 如果找到乒乓球的轮廓
if len(contours) > 0:
# 找到乒乓球的最大轮廓
max_contour = max(contours, key=cv2.contourArea)
# 计算乒乓球的中心坐标
M = cv2.moments(max_contour)
if M["m00"] != 0:
center_x = int(M["m10"] / M["m00"])
center_y = int(M["m01"] / M["m00"])
print("x=",center_x,"y=", center_y)
if (center_x >140)and(center_x<180)and(center_y>100)and(center_y<140):
data_to_send = b'1' # 将要发送的数据,需转换为 bytes 类型
ser.write(data_to_send)
else:
data_to_send = b'10' # 将要发送的数据,需转换为 bytes 类型
ser.write(data_to_send)
# 在乒乓球中心画一个圆
cv2.circle(frame, (center_x, center_y), 5, (0, 0, 255), -1)
# 绘制乒乓球外接圆
(x, y), radius = cv2.minEnclosingCircle(max_contour)
center = (int(x), int(y))
radius = int(radius)
cv2.circle(frame, center, radius, (0, 255, 0), 2)
# 显示视频帧
cv2.imshow('frame', frame)
# 按下'q'键退出循环
if cv2.waitKey(1) & 0xFF == ord('q'):
break
# 释放摄像头并关闭所有窗口
cap.release()
cv2.destroyAllWindows()
# 关闭串口
ser.close()上面是检测乒乓球是否在中心如果在中心就点亮led或者熄灭led 但是视频由于在单线程比较卡顿,后期可以改成多线程


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









