






在上一篇文章卫星通信终端中用到的GNSS系统,兼谈卫通天线的寻星(一)中,我们介绍了GNSS系统的定位功能在卫星通信终端中的应用------主要用于天线寻星和波束切换。而且,基于分析和计算,我们得出结论:最普通的GNSS接收机的定位精度就足以满足卫星通信终端的天线寻星和波束切换要求。
这篇文章我们将介绍GNSS的测姿测向功能和授时功能在卫星通信终端中的应用。
测姿测向功能
我们在上一篇文章中提到,卫星通信天线需要依据卫星位置、地面卫通天线的位置和姿态,计算出天线的寻星角度,从而将天线波束指向卫星。天线寻星时需要知晓天线的姿态,那么该通过何种手段获取这个姿态呢?
这里需要区分静中通天线和动中通天线。
静中通天线的姿态测量
顾名思义,静中通天线是指天线所在的平台处于静止状态,常见的类型有:
-
地面固定站:天线底座固定在地面。

卫通固定站
-
车载固定站:天线底座固定在车上。

车载卫通站
-
便携站:使用时天线展开,天线底座固定在地面;不用时天线可收藏,便于搬移。
卫通便携站
备注:以上图片均来自于网络。
对于静中通天线而言,由于平台静止,一旦初始对准后,除非受到外部干扰或需要重新配置,否则天线方向不会改变,会一直对准卫星。综合考量成本、精度等因素,静中通天线采用电子罗盘和倾角仪来测量姿态。其中,电子罗盘用于测量方位角(Azimuth),倾角仪用于测量俯仰角(Elevation)。
电子罗盘和倾角仪的成本远低于GNSS双天线测向设备,更低于GNSS + MEMS组合导航设备。
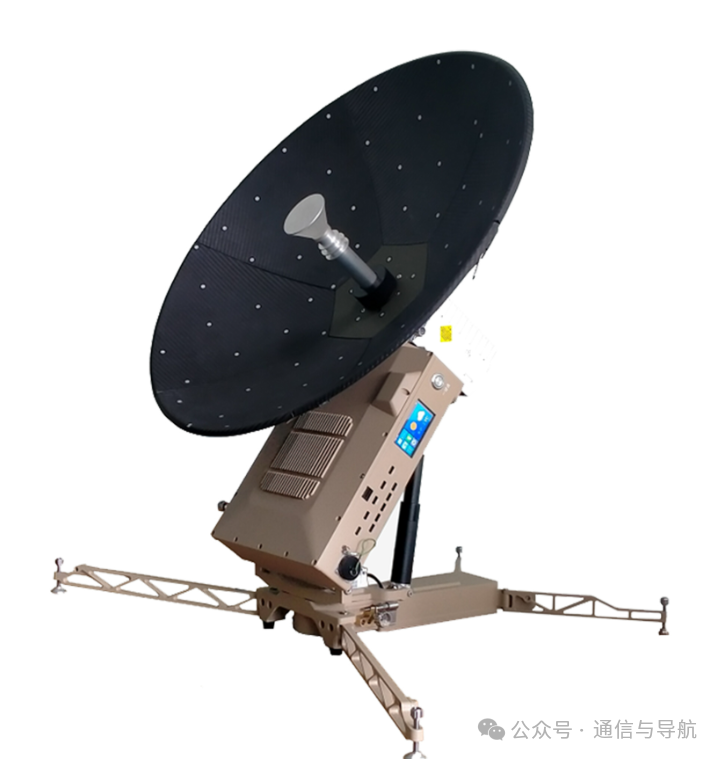
动中通天线的姿态测量
与静中通天线不同,动中通天线安装在不断移动的载体上,如机载、车载和船载。由于载体姿态不断变化,必须采用专用的姿态测量设备测量载体的姿态(方位角、俯仰角和横滚角),然后在寻星时进行姿态补偿。若在载体运动时不进行载体姿态补偿,卫通天线将无法跟踪卫星。
常用的动中通天线姿态测量设备有:
-
双天线GNSS接收机
双天线GNSS接收机,大家应该比较熟悉。在载体上安装2个GNSS天线,两个天线间隔一定距离。两个GNSS天线分别与测向型GNSS接收机连接,利用载波相位差分定位原理,测向型GNSS接收机能够输出航向角(Yaw,和真北的夹角)、俯仰角(和水平面的夹角)信息。系统的组成示意图如下:
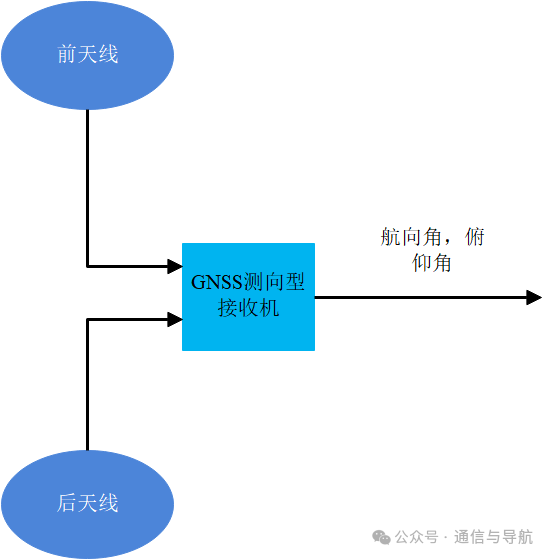
双天线GNSS测向
然而,在动中通天线上安装2个GNSS天线十分不便。
这里有两个考虑因素:
测向型GNSS接收机要达到角度测量精度,要求两个GNSS天线的间隔不能太小。双天线GNSS测向的精度与两个天线的间距(行业内专用名词是"基线长度")相关。假设基线长度是R,那么双天线GNSS测向接收机输出的航向角和俯仰角的精度如下:
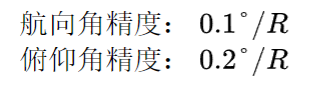
上面式子中R的单位是米。也就是说,当基线长度为1m时,航向角精度是0.1°;若基线长度降至0.5m,则航向角精度降为0.2°。
很多动中通天线尺寸有限,天线口径有0.3m、0.45m、0.6m、0.8m等。当基线长度小于0.6m时,测向精度不高。如果天线口径是0.3m、0.45m之类的,还需要延长底座结构来安装另一个GNSS天线,非常不便。
所以,目前市面上使用双天线GNSS测向型接收机来测量动中通天线姿态的情况不多。
-
GNSS + MEMS组合导航和GNSS + 光纤组合导航
目前,动中通天线载体姿态测量常用的是GNSS + MEMS组合导航和GNSS + 光纤组合导航。MEMS和光纤的主要差异在于内置陀螺的精度不同,基本原理相同,只需要一个GNSS天线即可。
GNSS+MEMS组合导航
MEMS的选型可以参考这篇文章机载动中通天线设计中如何选型MEMS惯导器件?。
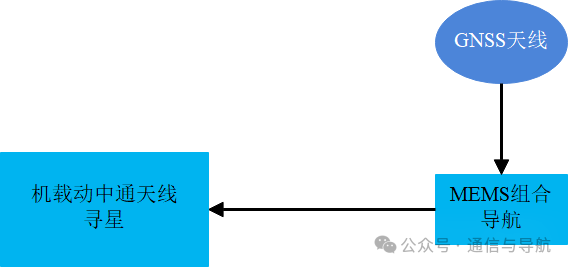
出于成本因素考虑,目前动中通天线大多采用GNSS + MEMS组合导航方式,很少使用GNSS + 光纤组合导航。即使在机载卫通这种应用中,机载动中通天线自身也是采用GNSS + MEMS组合导航提供姿态信息,同时引入飞机上光纤惯导测量的姿态信息。在飞机上光纤惯导信息有效的时候,优先使用机载光纤惯导的信息,自带的GNSS + MEMS组合导航作为辅助、备份。
具体连接关系如下图:
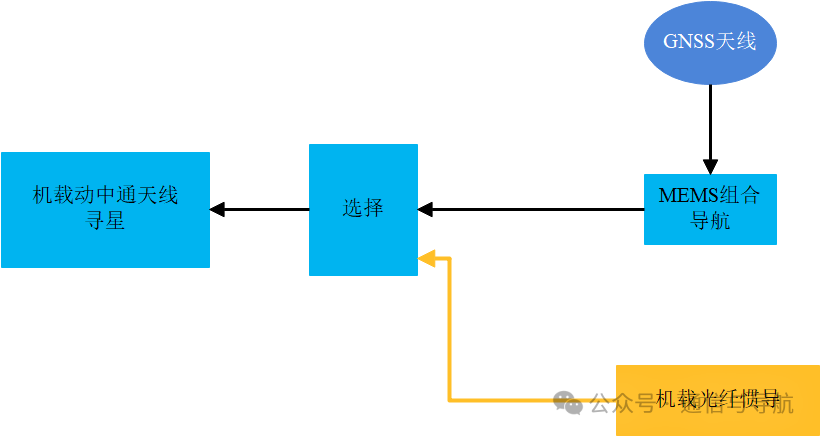
机载动中通天线选择惯导
授时功能
在低轨卫星的寻星过程中,需要用到GNSS的授时功能。
地球同步轨道卫星的位置固定不变,天线寻星时直接转动天线对准卫星所在方向即可。但低轨卫星以较低高度快速绕地球运行,且其位置随时间快速变化。只能依据卫星的星历数据获取轨道参数,通过SGP4/SDP4模型预测卫星的位置,然后结合几何关系计算出卫星相对于观测站天线的指向角度。
这里提到根据卫星轨道参数预测卫星的位置。预测卫星位置必须与某个时刻对应,即预测在某个年月日时分秒毫秒时刻卫星的位置。卫星通信终端必须知晓当前确切时间,而这个确切时间只能从GNSS授时获取。
由于低轨卫星轨道高度低,对于某个地面卫星通信终端来说,能和卫星通信的时间(行业内术语"过顶时间")非常短。像中国的千帆卫星,轨道高度大约800km - 1000km,过顶时间只有10几分钟。
我们假设整个卫星系统的时间是Ts,而卫星通信终端的本地时间是Tst。如果Ts和Tst不同步,卫星位置的预测肯定会产生误差,给天线寻星带来困难。
另外,某些低轨卫星通信采用的是TDD模式,卫星通信终端发射和接收不同时。为保证整个卫星通信系统的正常运行,必须严格保证卫通终端和主站之间的收发协同。如果Ts和Tst存在误差,也会导致卫通终端和主站之间收发不同步。
至于Ts和Tst需要的同步精度是多少?某些低轨卫星终端的发射时间控制精度要求<1us,包括Ts和Tst的不同步、信号处理延时、硬件响应延迟等。
因此,在卫星通信终端中,需要加入GNSS授时设备。目前常规的GNSS接收机输出的PPS授时精度大约是30ns - 50ns,能够满足卫星通信系统的需求。
码字不易,大家觉得文章不错,就安排一下一键三连吧:点赞、分享、推荐。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









