







1.文章综述
目标跟踪是计算机视觉领域的基础问题。目标跟踪过程中会遇到如目标遮挡,光线变化,镜头移动等问题。目前也没有一种跟踪算法能够完美解决所有这些问题,而这篇文章关注目标跟踪过程中目标的外形发生明显变化时的情况。目标外形发生变化可能是由于物体变形,突然运动,出画或者严重的遮挡。本文方法基于两个两点。首先,当连续两帧之间有微小变化时,对目标和它的上下文信息(context)而非仅对目标自身建模是很重要的,因为这样可以利用目标外观在时间上的关联信息。其次,增强长期跟踪器的检测模块是很关键的,不仅可以估计外形的改变而且可以在目标遇到遮挡或者出画情况出现时重新检测目标。
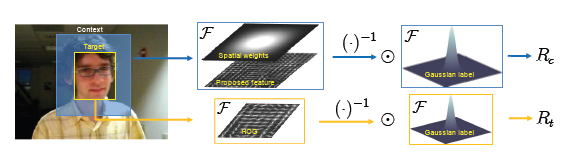
文中把跟踪任务分解为位移和尺度变换,在时间上下文上的相关滤波器有效提升了位移变换的有效性和准确性。并且它能够从置信度最高的帧学习相关滤波器。相关滤波器一般在M*N大小的patch上训练滤波器w来对目标外观建模。记patch为X, Xm,n循环平移(由生成向量生成循环矩阵,参见KCF跟踪算法)产生的所有样本都有一个高斯标签y(m,n)。
2.相关滤波器基础

3.跟踪模块
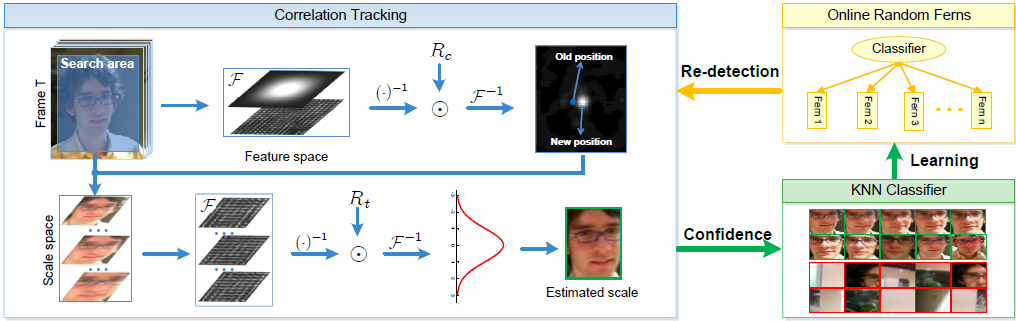
与之前工作不同的是,本文从一帧中训练了两个不同的基于相关滤波器的回归模型,一个是时间上下文模型Rc,用来判别出背景和目标,另外一个判别式的回归模型Rt从最可靠的跟踪目标中学习,用y的最大值确定跟踪结果的置信度。为了维持模型的稳定,文中定义了一个阈值Ta,当 max(y)> Ta时,用上面最后两个公式更新Rt,需要注意的是,特征空间中Rt的建模没有余弦窗的加权(Rc有余弦窗的加权)。在跟踪过程中,本文在估计的位移变换的位置附近构建了尺度金字塔来做尺度估计,此处引用的是跟踪算法DSST相对应部分,但与DSST不同的是,文中将所有的 patches resize为P*Q大小的,并且用hog特征的尺度金字塔。ys是目标回归模型Rt在提取的sP*sQ大小的图像块Js上的相关响应图。最优的尺度s就是让响应值ys最大的s。
4.检测模块

 代表第k个
fern
, σ
(k,n)
是随机惩罚函数。对每个F
k
,它的条件概率可以写成
代表第k个
fern
, σ
(k,n)
是随机惩罚函数。对每个F
k
,它的条件概率可以写成 ,
Nk,ci
是Ci类训练样本的数目,Nk是训练样本的总数目,从贝叶斯角度看,最佳类Ci,可以通过解如下方程获得:
,
Nk,ci
是Ci类训练样本的数目,Nk是训练样本的总数目,从贝叶斯角度看,最佳类Ci,可以通过解如下方程获得:
5.总结
1. 定义了两个基于相关滤波的回归模型,加上尺度回归模型,就是三个CF。
2. 定义了两个阈值,一个控制跟踪模块更新时间,一个用来抑制或激活检测模块。
3. 相关滤波+长期跟踪。

















 4386
4386

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









