









结构决定功能和协同处理:鲁棒有限制玻尔兹曼机(RoBM)
上一篇博文中提到,GRBM训练样本越多越好,样本多蕴含的分布更具有一般性,这对其他模型也适用。但是实际样本数据中往往有大量的噪声,这或多或少的影响了GRBM的性能,工业界一般都设有清洗数据的岗位,用人脑去除噪声数据。试想:人脑为什么具有如此强大的抗噪和容错能力?其实生命科学中有一句经典的总结:结构决定功能。不同的结构的网络具有不同的功能,下面要引入的鲁棒玻尔兹曼机(Robust boltzmann machine-RoBM)就是一个很好的例证。RoBM由GRBM和RBM组成,确切的说还有一个成分:选择门。对于这个模型我不想说它怎么训练的咯,因为GRBM和RBM的训练方法前面都说过了,我只想强调下“结构决定功能”怎么体现在概率图模型上。RoBM的模型如(图一)所示:
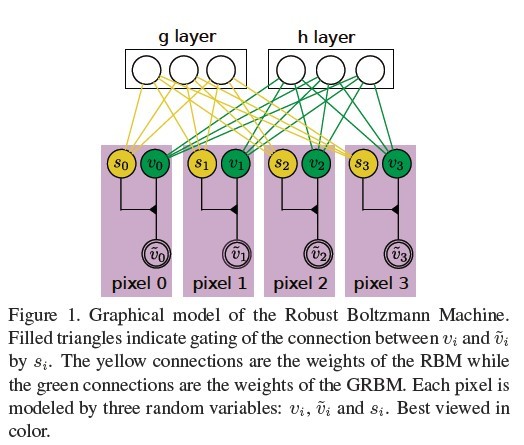
(图一)
在给定V-tilde(tilde就是V头上的波浪号哈,表示输入节点像素)时,S和V是独立的,同样G和H是独立的,对于GRBM和RBM的节点独立前面也已经讨论过。由于这些独立性再结合对于我们问题有利的假设(如高斯分布),能量函数定义就出来了,(对于能量函数的定义,也可以用概率图模型的clque(团)来解释,其实也是变量间的独立关系决定)。RoBM的能量函数如(公式一)所示:
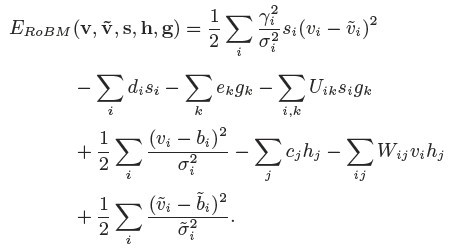
(公式一)
上面公式的第一行就是牵扯到变量S,V和V-tilde的选择门项,这项其实就决定选择门的功能,控制信号的输入,比如当S等于0时,随你V和V-tilde怎么变,这块能量不会太高;当S等于1时,gamma的平方控制着V和V-tilde的差异程度,如果二者差异太大,这块能量就会偏高。
第二行就是关于噪声S的RBM能量项(和RBM的能量公式是一样的),它控制着模型和噪声的关系,S是一个指示变量,表示该样本是否“应该”有噪声(“是否应该”这是个配置,有系统来完成)。
第三行当然就是干净数据V的GRBM能量项了(和GRBM的能量公式是一样的),他控制着模型和干净数据的关系。
第四行就是噪声的分布,假设噪声成高斯分布。
 ,另外这个模型的代码有点复杂,就不贴了,作者主页也挂出来了哈。
,另外这个模型的代码有点复杂,就不贴了,作者主页也挂出来了哈。
参考文献:
Robust Boltzmann Machines for Recognition and Denoising.Yi chuanTang,Ruslan,Geoffery Hinton
转载请注明出处:http://blog.csdn.net/cuoqu/article/details/8929748















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









