






作者 | 咖啡鱼 来源 | 智驾最前沿
点击下方卡片,关注“自动驾驶之心”公众号
>>点击进入→自动驾驶之心『行业第一线』技术交流群
本文只做学术分享,如有侵权,联系删文
近期,在上海举行的华为乾崑智能技术大会上,华为正式发布了乾崑智驾ADS4.0。

图 ADS4.0发布,图片来自搜狐
前一代华为ADS3.0则是于2024年4月24日正式发布,在当日举行的华为智能汽车解决方案发布会上,华为发布了新品牌“乾崑”,包括乾崑ADS3.0高阶智能驾驶等产品。时隔一年,华为的ADS进化了一代。华为ADS发展历程如下(没有发布1.0):
2020年:4月13日,德国莱茵TÜV集团向HUAWEIADS颁发了《ISO26262:2018功能安全管理体系认证证书》,这标志着华为ADS研发流程体系通过汽车功能安全最高等级ASILD认证。
2023年:4月16日发布ADS2.0。其算法架构基于BEV+GOD2.0+RCR2.0架构,减少了对高精地图的依赖,硬件上有所调整,降本的同时提升了整体功能的性能和体验。同年,华为智选车业务首款纯电轿跑车型Luceed亮相;问界M5智驾版、问界新M7等新款智选车型上市。
2024年:4月24日发布ADS3.0。架构设计为GOD感知网络+PDP决策网络+本能安全网络,将第一代的BEV方案与GOD融合形成GOD大网,采用端到端大模型,进一步提升智驾系统的性能。同年8月,ADS3.0迎来重磅升级,正式升级“车位到车位”和“VPD泊车代驾”两大功能。率先在享界S9上实现量产商用,实现了“上车智驾自己开,下车智驾自己停”的端到端体验。
2025年:4月22日发布ADS4.0。采用WEWA架构,按照不同需求划分为四个版本,传感器升级为高精度固态激光雷达+分布式毫米波雷达,只有ADSUltra旗舰版支持高速L3。问界M9将首批通过OTA升级华为ADS4.0,预计在第三季度完成升级。
需要说明,华为乾崑是智能汽车解决方案的品牌名称,ADS4.0是华为乾崑旗下的智能驾驶解决方案。华为乾崑另外一个重要组成部分是鸿蒙座舱HarmonySpace5。

ADS4.0版本的技术特色
据报道,ADS4.0底层算法开发的代码量超2000万行,由华为智驾“大脑”之称的光庭信息独家承接。虽然2000万行是估算的开发代码量,并非最终进入代码库成为发行版本的代码量,也可以看出ADS4.0功能之丰富,技术之复杂。
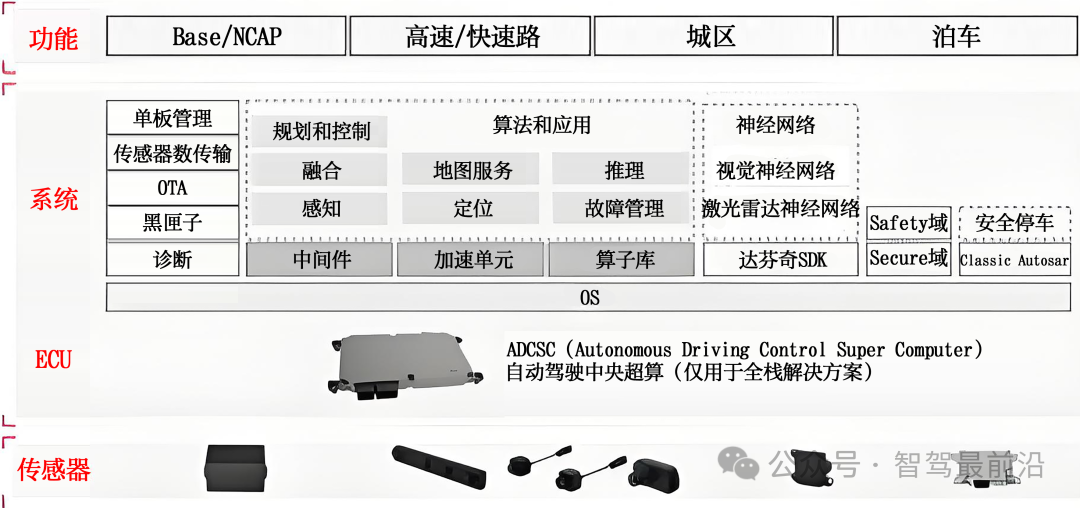
图 华为ADS全栈方案,4.0版本也符合这一框架,图片来自网络
1、架构方面
采用全新的WEWA架构,由云端的世界引擎(WorldEngine)和车端的世界行为模型(WorldActionModel)组成。云端的世界引擎利用扩散生成模型技术,可生成各种极端驾驶场景,如鬼探头、前车急刹等,以“AI训练AI”的方式解决行业普遍存在的长尾难题。车端的世界行为模型基于传感器数据进行训练,构建原生基模型,并引入MOE多专家能力系统。相比ADS上一代架构,ADS4.0的WEWA架构端到端时延降低了50%,反应更快,变道更丝滑,无效变道次数减少,通行效率提升20%,重(轻重的重)刹率降低30%。
2、运动控制方面
华为数字底盘引擎XMC迎来升级,采用全域融合架构,实现了车身、电机、悬架、转向、制动和热管理6合1全域融合(这个很类似宝马的heartofjoy,12合一智控)。结合车路状态预热网络和时空智能悬架技术,车辆可预判路面环境并优化控制策略,将智能驾驶的精准性和安全性推向新高度。
图 XMC数字底盘,图片来自网络
3、安全方面
从CAS3.0(CollisionAvoidanceSystem,即碰撞避免系统)升级为全维防碰撞系统CAS4.0,以“全时速、全方向、全目标、全天候、全场景”五维安全为目标。CAS4.0提供了前向AEB(生效范围为4-150km/h)、eAES(紧急避障辅助,生效范围为50-135km/h)、侧向防碰撞LOCP(生效范围为30-130km/h)和后向AEB(生效范围1-60km/h),还支持失能检测功能,并对哨兵模式进行了增强。加强AEB,明显是吸取最近小米事故的前车之鉴。
4、感知硬件方面
搭载了高精度固态激光雷达(尺寸为45×50×44mm,体积很小),最小感知精度可达3cm,能够应对下沉台阶、水管、石头等多种障碍物。此外,系统还配备了“全目标舱内激光视觉Limera”传感器,与舱内的前向摄像头集成,可实现精准小目标检测和100km/h下的舒适刹停。

图 固态激光雷达精确感知,图片来自网络
固态激光雷达是相对于传统机械旋转式激光雷达说的,有点类似固态硬盘和机械式旋转硬盘的区别,具有以下显著特点:
结构简单固态激光雷达摒弃了传统机械旋转式激光雷达的复杂机械结构,如旋转电机、扫描镜等,采用固态电子元件实现光束扫描和探测。这使得其内部结构更加紧凑、稳定,减少了因机械运动部件磨损、故障而导致的系统失效风险,提高了可靠性和耐用性,降低了维护成本。
体积小、重量轻由于无需庞大的机械结构,固态激光雷达可以设计得更加小巧轻便。4.0中华为的高精度固态激光雷达尺寸仅为45×50×44mm,便于集成安装在车辆、机器人等各种平台上,不会对载体的空间和性能产生过大影响,为设备的小型化和轻量化设计提供了可能。
高分辨率和高精度固态激光雷达通常采用多个激光发射和接收通道,能够实现高密度的点云扫描,提供更高的空间分辨率和精度。
比如,禾赛科技的AT128固态激光雷达,具有153万每秒的超高点频,在10%反射率下最远探测距离达200米,能够精确地感知周围环境的细节信息,对于识别小型障碍物、区分不同物体等任务具有出色的表现。
5、版本及商用计划方面
ADS4.0分为ADSSE基础版、ADSPro增强版、ADSMax超阶版和ADSUltra旗舰版多个版本,其中ADSUltra旗舰版正式支持高速L3商用。据华为智能汽车解决方案BUCEO靳玉志透露,该系统已通过6亿公里仿真验证,预计2025年6月前覆盖全国50万个停车场,支持车位到车位自动驾驶,其中10万个停车场可实现跨层泊车代驾(VPD)和代客充电功能。首批搭载ADS4.0的车型包括问界M9、M8、奇瑞智界R7、东风猛士M817等,预计2025年第三季度完成升级。

华为ADS4.0相对于3.0的新增和改进
1、新增功能
安全领域司机失能守护:可在驾驶员突发心梗等失能状况时,自动检测并安全靠边停车,保护驾乘安全并减少交通干扰。
增强版哨兵模式:与乾崑云瞰结合,支持手机实时查看四路环视影像并对隐私脱敏。
高速专用的Cut-in鸣笛提醒功能:在高速行驶场景中,当有车辆突然切入时,系统会发出鸣笛提醒,以提高驾驶安全性。
HUAWEIADS与XHUD融合的危险增强提示:在低能见度及盲区场景提供预警,帮助驾驶员更好地识别潜在危险。
ADS与车灯深度融合的动态光毯:可随速、随弯、随环境自动调整照明形态,提升行车安全。
智驾爆胎稳定控制辅助功能:在高速直行、弯道、湿滑路面等场景下,无论前轮或后轮爆胎,都可以保持车辆稳定。
泊车领域跨城车位到车位:支持全国主要高速收费站,实现跨城通勤“0”接管,让长途旅行停车更轻松便捷。
泊车代驾功能拓展:从单层升级到跨层,从地下停车场升级到地面园区,覆盖机场、商场、写字楼、小区等各类场景,还增加了代客充电功能。
另外,某些高配版本新增了高速L3解决方案:比如ADSUltra旗舰版搭载高速L3专属方案,驾驶员可将视线转移至非驾驶相关活动,但需保持一定警觉性,当收到接管请求时及时接管。
2、改进功能
架构方面:采用WEWA架构,云端的WorldEngine世界引擎利用扩散生成模型技术,生成长尾难例场景,车端的WorldActionModel世界行为模型具备多传感器全模态感知能力。相比前代架构,端到端时延降低50%,通行效率提升20%,重刹率下降30%。
安全方面:全维防碰撞系统CAS4.0相比CAS3.0,在“全时速”上覆盖从1km/h到150km/h;“全方向”上首发量产高精度固态激光雷达,提升车尾感知;“全目标”上首发量产舱内激光视觉传感器Limera,提升远距离小目标检测能力;“全天候”上首创分布式毫米波雷达,提升极端天气下的检测能力;路面自适应AEB功能升级,能精准感知路面附着系数。
运动控制方面:HUAWEIXMC数字底盘引擎升级,首创全域融合架构,实现车身、电机、悬架、转向、制动等部件的中央集中控制,控制处理能力提升10倍,协同器件数量增长5倍,通信链路时延压缩至1ms以内,端到端调度效率提升10倍。
据报道,亚太股份是华为ADS4.0线控底盘的主要供应商。亚太股份即浙江亚太机电股份有限公司,是一家在汽车制动系统领域颇具影响力的企业。

作为核心的华为WEWA架构
华为WEWA架构(WorldEngine+WorldActionModel)是华为乾崑智驾ADS4.0的核心技术框架,旨在实现从传统“人类学车”到“AI学车”的范式转变。

图 WorldEngine+WorldActionModel架构介绍,图片来自网络
1、教学角色分类
WorldEngine(WE)作为教练角色
云端“AI司机”,通过扩散生成模型(DiffusionModel)生成高可控的复杂驾驶场景(如极端难例)
利用生成式AI模拟真实世界未覆盖的场景,提升AI训练的覆盖率和泛化能力。
WorldActionModel(WA)作为学员角色
本地行为决策模型,基于WE生成的场景数据实时优化驾驶策略
结合强化学习(RL)和深度学习(DL),实现动态环境下的高精度决策与控制。

图 WEWA架构示意图。来自网络
2.关键技术
扩散生成模型:WE通过扩散过程逐步生成逼真驾驶场景,例如罕见交通事故或恶劣天气条件,解决传统数据采集的局限性。
闭环学习系统:WA在车辆端执行决策后,反馈实际表现至WE,形成“生成-训练-验证”闭环,持续优化模型。
数字底盘引擎:整合车辆动力学控制(如转向、制动),确保WA的决策能精准执行。
3.应用效果
L3级自动驾驶:WEWA支持高速场景下的有条件自动驾驶(如自动变道、避障),是中国首个公开的L3级解决方案。
效率提升:相比传统人工标注训练,WEWA的AI生成场景可缩短开发周期约40%,并降低数据成本。
4.与传统架构对比
对比维度 | 传统架构(规则驱动) | WEWA架构(AI驱动) |
场景覆盖 | 依赖人工采集,长尾场景不足 | AI生成无限场景,覆盖极端案例 |
迭代速度 | 需手动调整规则,周期长 | 自动闭环优化,实时更新模型 |
泛化能力 | 特定场景有效,跨域适应性差 | 通过生成数据增强跨场景鲁棒性 |

总结
应该说,我们可以从华为的ADS4.0上看到其他企业方案的类似之处。
比如AI生成极端场景和数据闭环,和Momenta的数据飞轮,至少在哲学上是一样的。
数字底盘引擎XMC则可以看到宝马智控系统的影子。智控不同于智驾,是集合多个控制类域控于一体,提升驾驶流畅度舒适度和安全性的软硬件结合系统,但不会代替驾驶员驾驶。
但把诸多先进因素熔于一炉,并且有强大执行力和深厚软件功底做背书,华为ADS4.0在实车市场上的表现值得期待。
自动驾驶之心
论文辅导来啦

知识星球交流社区
近4000人的交流社区,近300+自动驾驶公司与科研结构加入!涉及30+自动驾驶技术栈学习路线,从0到一带你入门自动驾驶感知(大模型、端到端自动驾驶、世界模型、仿真闭环、3D检测、车道线、BEV感知、Occupancy、多传感器融合、多传感器标定、目标跟踪)、自动驾驶定位建图(SLAM、高精地图、局部在线地图)、自动驾驶规划控制/轨迹预测等领域技术方案、大模型,更有行业动态和岗位发布!欢迎加入。

独家专业课程
端到端自动驾驶、大模型、VLA、仿真测试、自动驾驶C++、BEV感知、BEV模型部署、BEV目标跟踪、毫米波雷达视觉融合、多传感器标定、多传感器融合、多模态3D目标检测、车道线检测、轨迹预测、在线高精地图、世界模型、点云3D目标检测、目标跟踪、Occupancy、CUDA与TensorRT模型部署、大模型与自动驾驶、NeRF、语义分割、自动驾驶仿真、传感器部署、决策规划、轨迹预测等多个方向学习视频
学习官网:www.zdjszx.com

















 1223
1223

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









