









学习目标:
提示:通过 node-schedule 定时任务做一些打卡提醒和一些热搜新闻推荐
例如:
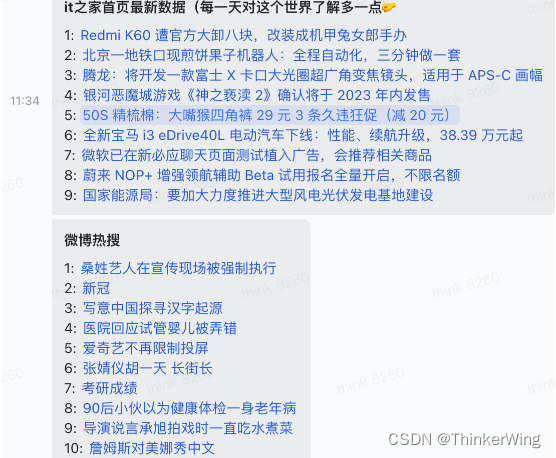
- 微博
- IT之家
- 上班提醒、吃饭提醒、下班提醒
介绍:
通过这个项目熟悉一下 飞书机器人 的大致使用,顺带练手一下定时任务,最简单的应用场景大概就是平常各类的打卡提醒了, 当然最主要的功能还是告警通知、会话互动… 慢慢拓展
仓库地址:https://github.com/ThinkerWing/flybook-bot
目录结构:
提示:通过tree > tree.text生成
├── config
│ ├── index.js // baseUrl 及一些账号的参数配置
│ └── local.js // 避免泄漏真实地址导致的恶意调用,没上传
├── images // 存放md引用的示例图片
│ ├── afternoon.png
│ ├── morning.jpg
│ └── night.png
├── index.js // 存放了一些示例
├── package-lock.json
├── package.json
├── readme.md
├── request
│ ├── index.js // 网络请求的简单封装
├── utils
│ ├── index.js // 发送消息的封装
│ └── timing.js // 定时任务的方法
│ └── itzj.js // it之家首页最新信息的推送
│ └── weibo.js // 更新微博热搜
└── worker
└── index.js // 定时运行定时任务
实现效果:

定时任务
早上天气预报
https://www.tianqiapi.com/index/doc?version=day
https://www.yiketianqi.com/free/day?appid=appid&appsecret=appsecret&unescape=1&cityid=101210101
中午干饭提醒
晚上下班提醒
* * * * * *
┬ ┬ ┬ ┬ ┬ ┬
│ │ │ │ │ |
│ │ │ │ │ └ 星期几,取值:0 - 7,其中 0 和 7 都表示是周日
│ │ │ │ └─── 月份,取值:1 - 12
│ │ │ └────── 日期,取值:1 - 31
│ │ └───────── 时,取值:0 - 23
│ └──────────── 分,取值:0 - 59
└─────────────── 秒,取值:0 - 59(可选)
上传图片
首先通过接口查询app_access_token
https://open.feishu.cn/open-apis/auth/v3/app_access_token/internal
然后注意要开通上传图片的权限最后调用上传图片的接口拿到image_key
https://open.feishu.cn/open-apis/im/v1/images















 730
730











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









