









本系列由斯坦福大学CS231n课后作业提供
CS231N - Assignment2 - Q4 - ConvNet on CIFAR-10
问题描述:使用IPython Notebook(现版本为jupyter notebook,如果安装anaconda完整版会内置),在ConvolutionalNetworks.ipynb文件中,你将实现几个卷积神经网络中常用的新层。使用CIFAR-10数据,训练出一个深度较浅的卷积神经网络,最后尽你所能训练出一个最佳的神经网络。
任务
实现卷积神经网络卷积层的前向计算与反向传导
实现卷积神经网络池化层的前向计算与反向传导
卷积层与池化层的加速
卷积神经网络结构
常规神经网络的输入是一个向量,经一系列隐层的转换后,全连接输出。在分类问题中,它输出的值被看做是不同类别的评分值。
神经网络的输入可不可以是图片呢?
常规神经网络对于大尺寸图像效果不尽人意。图片的像素点过多处理起来极为复杂。因此在处理图片的过程中较为合理地降维成为一个模糊的研究方向。因此基于神经网络结构产生了一个新的神经网络层结构,我们称之为卷积神经网络。
下图是多层卷积神经网络的一种结构:
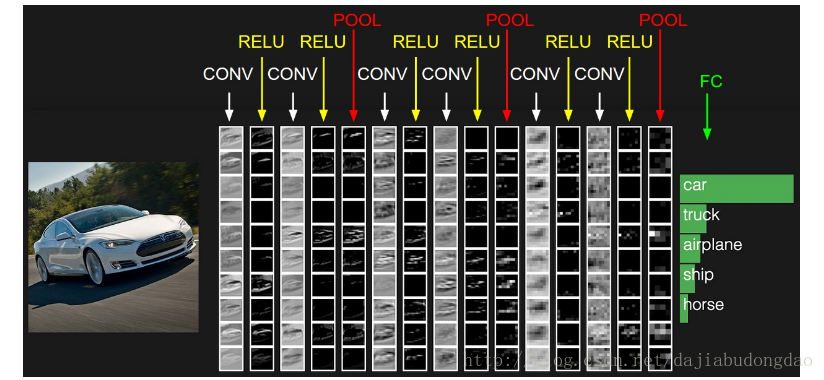
可以看出,网络结构开始为“卷积层(CONV),relu层(RELU),池化层(POOL)”C-R-P周期循环,最后由全连接层(FC)输出结果。
注:实际应用的过程中常常不限于C-R-P循环,也有可能是C-C-R-P等等
设激活函数
f
s
i
g
m
o
i
d
(
−
)
f_{sigmoid}(-)
fsigmoid(−),池化操作
p
o
o
l
(
−
)
pool(-)
pool(−),x为输入数据代表图像像素矩阵,w为权重代表过滤层(卷积核),b代表偏置。C-R-P周期则有下面的计算公式:
x
j
l
=
f
r
e
l
u
(
p
o
o
l
(
∑
i
∈
M
j
x
i
l
−
1
∗
w
i
j
l
+
b
j
l
)
)
x_j^l=f_{relu}(pool(\sum_{i\in M_j}x_i^{l-1}\ast w_{ij}^l+b_{j}^l))
xjl=frelu(pool(i∈Mj∑xil−1∗wijl+bjl))
卷积神经网络的理解比较困难,为了更好地了解,我们先讲解过程再讨论实际作用。
卷积层的朴素(无加速算法)实现与理解
(在实际应用过程中,一般使用加速过程处理的卷积层,这里表现的是原始卷积版本)
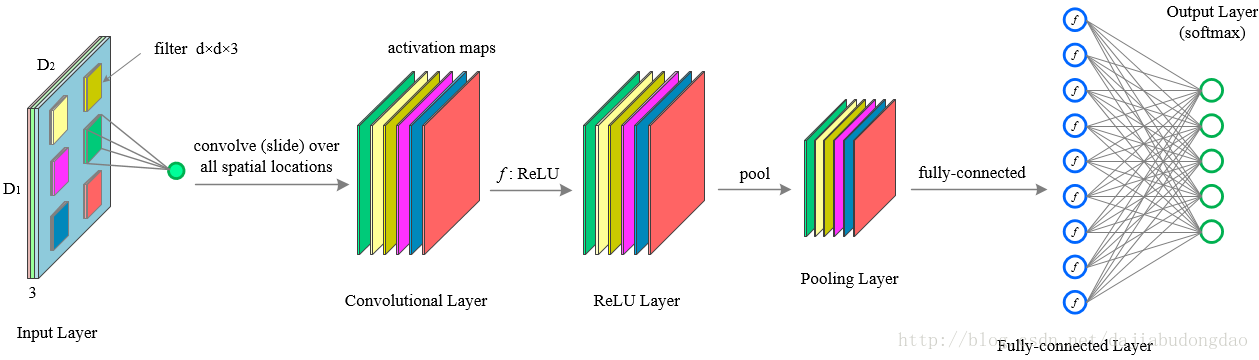
###卷积层元素
下图是卷积层的元素:输入图片与过滤参数。

输入图片(image):输入层(Input Layer)有3个深度(D1,D2,D3,通常代表图片的三个通道RGB)。我可以将每个深度独立出来,看成三幅图片。图片的大小为32*32。
过滤参数(filter):过滤器有很多称呼,如“卷积核”、“过滤层”或者“特征检测器”。不要被名词坑了。过滤器也有3个深度(D1,D2,D3),就是与输入图片的深度进行一一对应,方便乘积操作。过滤器窗口一般比输入图片窗口小。
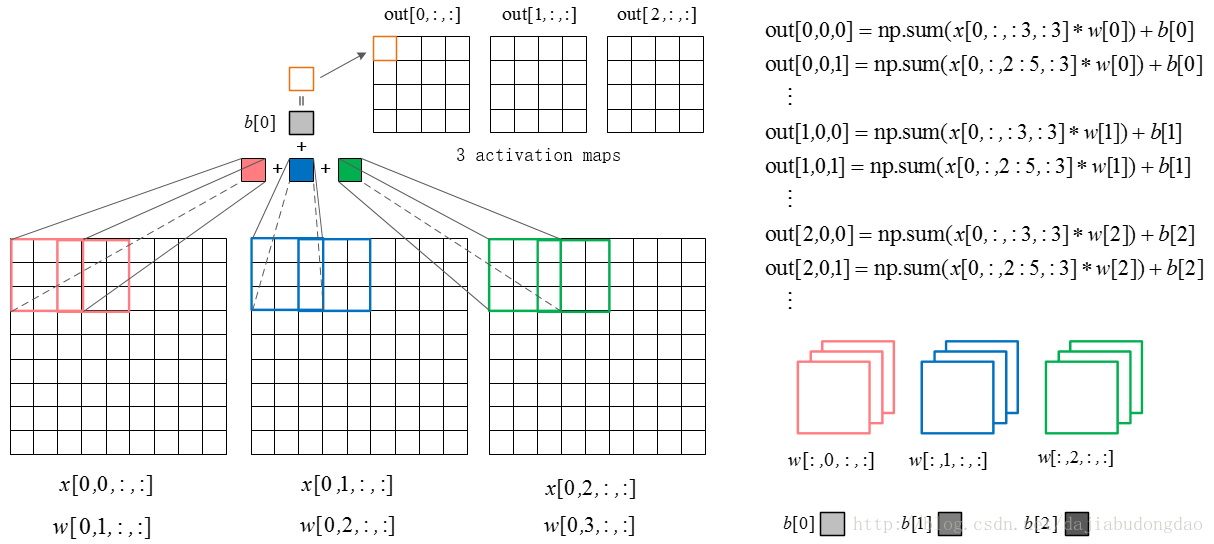
###卷积层的前向计算
下图是卷积层的具体实现方法。
x代表图片image矩阵,w代表过滤层矩阵。过滤器与image一样窗口大小的部分乘积求和,这就是卷积过程。下面的动图就是卷积过程。
上图中我们看到每次窗口移动2格。这2格就是每次卷积的移动步长。
我们看到原来的图片在周围填充了一圈0。填充0的宽度即为每次卷积的填充宽度
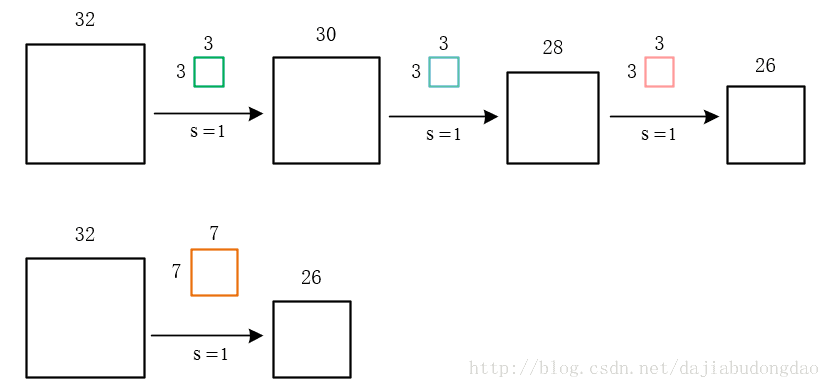
移动步长很好理解,但为什么要填充呢?假设我们不填充。如下图:
会发现每次卷积之后都会有维度降低。浅层卷积网络可能没有什么问题。但是深层卷积可能在网络没到最后的时候维度即降为0。
这显然不是我们所希望的。
当然,如果有意愿用卷积计算去降维也可以,不过我们更喜欢用池化层的池化操作降维。为甚?我们必须先了解卷积层的作用。
卷积层正向卷积过程代码实现
def conv_forward_naive(x, w, b, conv_param):
"""
A naive implementation of the forward pass for a convolutional layer.
The input consists of N data points, each with C channels, height H and
width W. We convolve each input with F different filters, where each filter
spans all C channels and has height HH and width HH.
Input:
- x: Input data of shape (N, C, H, W)
- w: Filter weights of shape (F, C, HH, WW)
- b: Biases, of shape (F,)
- conv_param: A dictionary with the following keys:
- 'stride': The number of pixels between adjacent receptive fields in the
horizontal and vertical directions.
- 'pad': The number of pixels that will be used to zero-pad the input.
Returns a tuple of:
- out: Output data, of shape (N, F, H', W') where H' and W' are given by
H' = 1 + (H + 2 * pad - HH) / stride
W' = 1 + (W + 2 * pad - WW) / stride
- cache: (x, w, b, conv_param)
"""
###########################################################################
# TODO: Implement the convolutional forward pass. #
# Hint: you can use the function np.pad for padding. # ###########################################################################
N, C, H, W = x.shape
F, C, HH, WW = w.shape
stride = conv_param['stride']
pad = conv_param['pad']
##计算卷积后新矩阵的大小并分配全零值占位
new_H = 1 + int((H + 2 * pad - HH) / stride)
new_W = 1 + int((W + 2 * pad - WW) / stride)
out = np.zeros([N, F, new_H, new_W])
##卷积开始
for n in range(N):
for f in range(F):
##临时分配(new_H, new_W)大小的全便宜香卷积矩阵,(即提前加上偏移项b[f])
conv_newH_newW = np.ones([new_H, new_W])*b[f]
for c in range(C):
##填充原始矩阵,填充大小为pad,填充值为0
pedded_x = np.lib.pad(x[n, c], pad_width=pad, mode='constant', constant_values=0)
for i in range(new_H):
for j in range(new_W):
conv_newH_newW[i, j] += np.sum( pedded_x[i*stride:i*stride+HH, j*stride:j*stride+WW] * w[f,c,:,:] )
out[n,f] = conv_newH_newW
###########################################################################
# END OF YOUR CODE #
###########################################################################
cache = (x, w, b, conv_param)
return out, cache
###卷积层的个人理解
对卷积层的作用,很多人的说法莫衷一是。我这里谈谈自己的理解。
####1. 实现某像素点多通道以及周围信息的整合
说白了就是将一个像素与其周围的点建立联系。我们用将一点及其周边“卷”起来求和计算。那么每一层卷积必然是将一个像素点与周围建立联系的过程。
这么说起来“Convolution”翻译为“卷和”更恰当,其实卷积的“积”是积分的意思
####2. 我们先讲一个丧心病狂的故事
如果你每天玩游戏不陪女朋友,那么女朋友每天都要扇你一巴。打你一巴掌后,脸的一部分就肿了。你的脸就是图片,女朋友的巴掌就是卷积核层。每打一巴掌,相当于“卷积核”作用脸部一个地方“做卷积”。脸肿了相当于脸部“卷积后”输出的结果。
如果有一天,女友忍无可忍,连续扇你嘴巴,那么问题就出现了。上一次扇你鼓起来的包还没消肿,第二个巴掌就来了。女友不断扇你,卷积不地作用在你脸上,效果不断叠加了,这样这些效果就可以求和了。
女友再狠一点,频率越来越高,以至于你都辨别不清时间间隔了。那么,求和就变成积分了。这就是“卷积”一词的由来。
女友打你在不同的位置,自然会有不同的身体反应。根据打你后卷积后身体的反应卷积结果可以判断出打到什么位置了。
| 身体反应(卷积结果) | 可能推论 |
|---|---|
| 肿了 | 打到脸了 |
| 红了 | 打到肚子了 |
| 没反应 | 打到骨头了 |
| 女友手疼 | 打到骨刺了 |
这么一解释卷积层的解释果然很明显。。。。嗯,对。。。。我自己都信了。。。。
3. 图像处理中模板的概念
在传统图像处理中,模板即一个矩阵方块。在这里你可以认为是卷积核,计算为方法为卷积运算。如下面的一个模板
1
9
[
1
1
1
1
1
1
1
1
1
]
\frac{1}{9} \begin{bmatrix} 1&1&1\\ 1&1&1\\ 1&1&1 \end{bmatrix}
91⎣⎡111111111⎦⎤
一幅图片经过它的卷积运算,可以得到这样的结果。
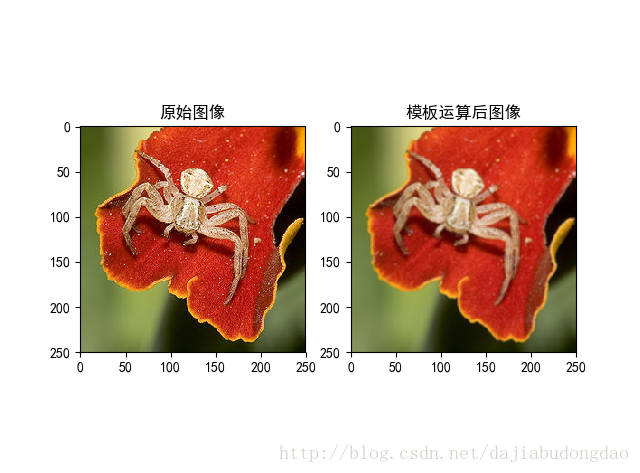
上面的那种模板就是“低通滤波模板”的一种。
通过改变方阵的数值与大小,可以生成很多新鲜的模板。如“高通滤波模板”,“边缘检测模板”,“匹配滤波边缘检测模板”等等。。
那么问题来了:我们该在什么时候,用什么数值的模板?对传统的模板选择,凭借的是算法工程师的经验。但现在,我们不怕了!~~~~~~深度学习帮我们训练模板的参数。图片在卷积神经网络的一次前向过程,相当于对图像做一次特定的处理。
###卷积层反向求导
前面我们介绍了卷积层的前向计算。大致了解了卷积的作用,但是神经网络的参数是怎么来的?参数的获取是一个迭代的训练的过程,每次反向传播是纠正参数,减小误差。(具体细节请看别人关于神经网络“前向计算,反向传播”的讲解。)
上文提到了C-R-P周期计算公式。
x
j
l
=
f
r
e
l
u
(
p
o
o
l
(
∑
i
∈
M
j
x
i
l
−
1
∗
w
i
j
l
+
b
j
l
)
)
x_j^l=f_{relu}(pool(\sum_{i\in M_j}x_i^{l-1}\ast w_{ij}^l+b_{j}^l))
xjl=frelu(pool(i∈Mj∑xil−1∗wijl+bjl))
f
r
e
l
u
(
−
)
f_{relu}(-)
frelu(−)为relu激活函数,池化操作用
p
o
o
l
(
−
)
pool(-)
pool(−)表示,x为输入数据代表图像像素矩阵,w为权重代表过滤器(卷积核),b代表偏置。
编写卷积层反向传播时,暂时不用考虑池化层,与激活函数。我们可以用g()代指卷积层后所有的操作。所以这一层的反向对x求导可以简化为如下操作。
g
(
x
∗
w
+
b
)
=
g
(
o
u
t
)
o
u
t
=
x
∗
w
+
b
∂
g
∂
x
=
∂
g
∂
o
u
t
∗
∂
o
u
t
∂
x
g(x*w+b)=g(out)\\ out=x*w+b \\ \frac{\partial g}{\partial x}=\frac{\partial g}{\partial out}*\frac{\partial out}{\partial x}
g(x∗w+b)=g(out)out=x∗w+b∂x∂g=∂out∂g∗∂x∂out
在斯坦福CS231n课程作业中,把无实际用处的g忽略。记
d
x
=
∂
g
∂
x
,
d
o
u
t
=
∂
g
∂
o
u
t
dx=\frac{\partial g}{\partial x},dout=\frac{\partial g}{\partial out}
dx=∂x∂g,dout=∂out∂g。
对于中国大陆学生来说这是一个深渊巨坑的记法。在高等数学教材里。dout,dx有专门的含义。但这里我们要遵循老师的记法。
下图为卷积层反向求导的过程图片。
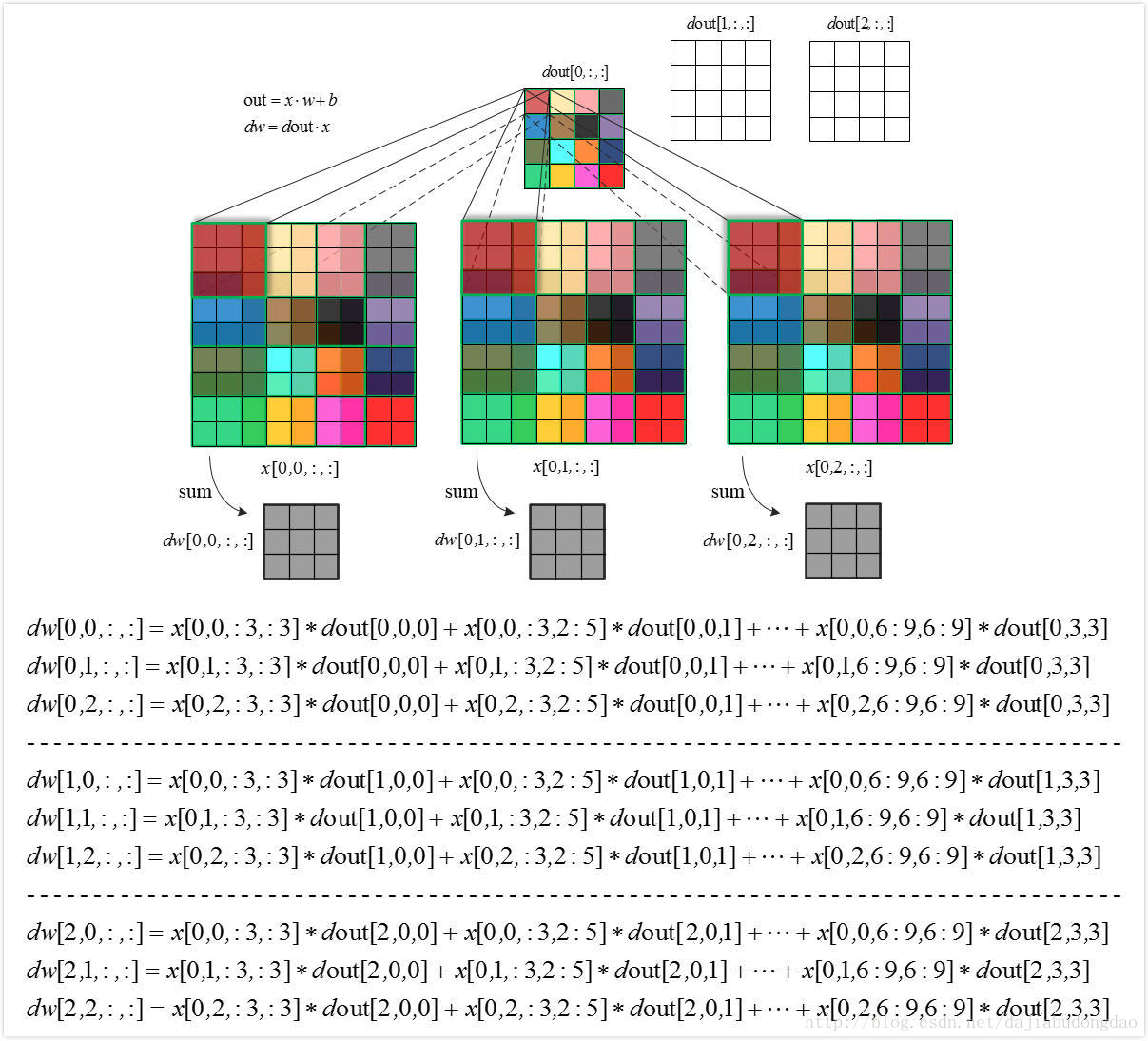
卷积层反向求导过程代码实现
def conv_backward_naive(dout, cache):
"""
A naive implementation of the backward pass for a convolutional layer.
Inputs:
- dout: Upstream derivatives.
- cache: A tuple of (x, w, b, conv_param) as in conv_forward_naive
Returns a tuple of:
- dx: Gradient with respect to x
- dw: Gradient with respect to w
- db: Gradient with respect to b
"""
###########################################################################
# TODO: Implement the convolutional backward pass. #
###########################################################################
# 数据准备
x, w, b, conv_param = cache
pad = conv_param['pad']
stride = conv_param['stride']
F, C, HH, WW = w.shape
N, C, H, W = x.shape
N, F, new_H, new_W = dout.shape
# 下面,我们模拟卷积,首先填充x。
padded_x = np.lib.pad(x,
((0, 0), (0, 0), (pad, pad), (pad, pad)),
mode='constant',
constant_values=0)
padded_dx = np.zeros_like(padded_x) # 填充了的dx,后期去填充即可得到dx
dw = np.zeros_like(w)
db = np.zeros_like(b)
for n in range(N): # 第n个图像
for f in range(F): # 第f个过滤器
for i in range(new_H):
for j in range(new_W):
db[f] += dout[n, f, i, j] #求导为1,无争议
dw[f] += padded_x[n, :, i*stride : HH + i*stride, j*stride : WW + j*stride] * dout[n, f, i, j]
padded_dx[n, :, i*stride : HH + i*stride, j*stride : WW + j*stride] += w[f] * dout[n, f, i, j]
# 反填充
dx = padded_dx[:, :, pad:pad + H, pad:pad + W]
###########################################################################
# END OF YOUR CODE # ###########################################################################
return dx, dw, db
池化层的朴素(无加速算法)实现与理解
池化层的前向计算
在“卷积层需要填充”这一部分我们就说过:卷积层负责像素间建立联系,池化层负责降维。从某种层度上来说,池化操作也算是一种不需要填充操作的特殊的卷积操作。
池化操作也需要过滤器(也有翻译为池化核),每次过滤层移动的距离叫做步长。
不过在池化操作中,过滤器与原图可以不做卷积运算,仅仅是降维功能。下图就表示过滤器选择窗口最大项的**“最大池化操作”**。
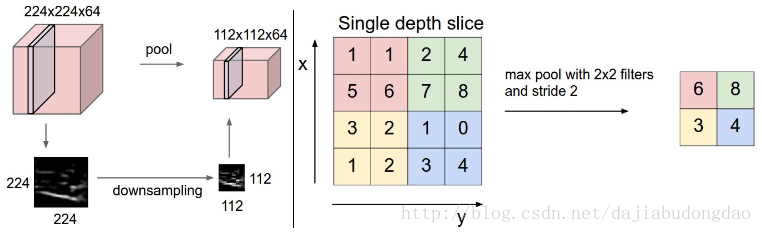
最大池化操作的前向计算
基于卷积的经验,很快地写出最大池化操作的前向计算与反向求导的代码。
def max_pool_forward_naive(x, pool_param):
"""
A naive implementation of the forward pass for a max pooling layer.
Inputs:
- x: Input data, of shape (N, C, H, W)
- pool_param: dictionary with the following keys:
- 'pool_height': The height of each pooling region
- 'pool_width': The width of each pooling region
- 'stride': The distance between adjacent pooling regions
Returns a tuple of:
- out: Output data
- cache: (x, pool_param)
"""
###########################################################################
# TODO: Implement the max pooling forward pass #
###########################################################################
# 准备数据
N, C, H, W = x.shape
pool_height = pool_param['pool_height']
pool_width = pool_param['pool_width']
pool_stride = pool_param['stride']
new_H = 1 + int((H - pool_height) / pool_stride)
new_W = 1 + int((W - pool_width) / pool_stride)
out = np.zeros([N, C, new_H, new_W])
for n in range(N):
for c in range(C):
for i in range(new_H):
for j in range(new_W):
out[n,c,i,j] = np.max(x[n, c, i*pool_stride : i*pool_stride+pool_height, j*pool_stride : j*pool_stride+pool_width])
###########################################################################
# END OF YOUR CODE #
###########################################################################
cache = (x, pool_param)
return out, cache
最大池化的反向求导
def max_pool_backward_naive(dout, cache):
"""
A naive implementation of the backward pass for a max pooling layer.
Inputs:
- dout: Upstream derivatives
- cache: A tuple of (x, pool_param) as in the forward pass.
Returns:
- dx: Gradient with respect to x
"""
###########################################################################
# TODO: Implement the max pooling backward pass #
###########################################################################
# 数据准备
x, pool_param = cache
N, C, H, W = x.shape
pool_height = pool_param['pool_height']
pool_width = pool_param['pool_width']
pool_stride = pool_param['stride']
new_H = 1 + int((H - pool_height) / pool_stride)
new_W = 1 + int((W - pool_width) / pool_stride)
dx = np.zeros_like(x)
for n in range(N):
for c in range(C):
for i in range(new_H):
for j in range(new_W):
window = x[n, c, i * pool_stride: i * pool_stride + pool_height,j * pool_stride: j * pool_stride + pool_width]
dx[n, c, i * pool_stride: i * pool_stride + pool_height, j * pool_stride: j * pool_stride + pool_width] = (window == np.max(window))*dout[n,c,i,j]
###########################################################################
# END OF YOUR CODE #
###########################################################################
return dx
三明治卷积层(Convolutional “sandwich” layers)
“三明治”卷积层是我得到资料是斯坦福大学CS231n的专门讲法,其实就是将多个操作组合成一个常用模式。前文我一直说的C-R-P组合,可以看做一种三明治卷积层。卷积神经网络在实际应用上,也往往跳过底层实现,直接面向组合操作。
在文件cs231n/layer_utils.py 里keras的源码里。都会找到这样的“三明治”卷积层。它们的简化了复杂深度学习神经网络的实现。















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









