







from:
http://blog.csdn.net/mirkerson/article/details/8232422
http://blog.chinaunix.net/uid-25906157-id-1754499.html
http://blog.csdn.net/bg2bkk/article/details/8946562
1.mmap系统调用
void *mmap(void *addr, size_t len, int prot, int flags, int fd, off_t offset);
功能:负责把文件内容映射到进程的虚拟地址空间,通过对这段内存的读取和修改来实现对文件的读取和修改,而不需要再调用read和write;
参数:addr:映射的起始地址,设为NULL由系统指定;
len:映射到内存的文件长度;
prot:期望的内存保护标志,不能与文件的打开模式冲突。PROT_EXEC,PROT_READ,PROT_WRITE等;
flags:指定映射对象的类型,映射选项和映射页是否可以共享。MAP_SHARED,MAP_PRIVATE等;
fd:由open返回的文件描述符,代表要映射的文件;
offset:开始映射的文件的偏移。
返回值:成功执行时,mmap()返回被映射区的指针。失败时,mmap()返回MAP_FAILED。
mmap映射图:

2.解除映射:
int munmap(void *start, size_t length);
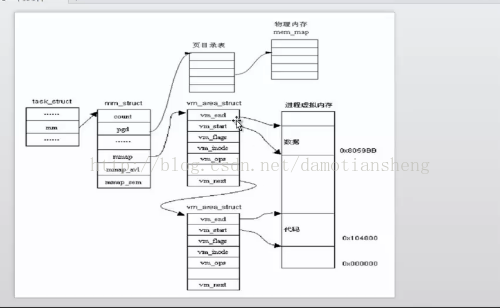
3.虚拟内存区域:
虚拟内存区域是进程的虚拟地址空间中的一个同质区间,即具有同样特性的连续地址范围。一个进程的内存映象由下面几个部分组成:程序代码、数据、BSS和栈区域,以及内存映射的区域。
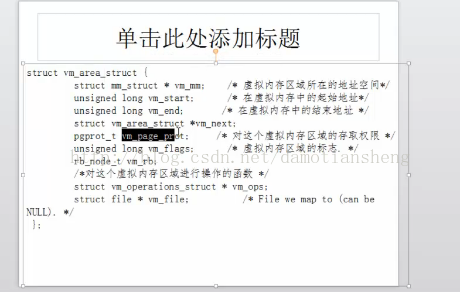
linux内核使用vm_area_struct结构来描述虚拟内存区。其主要成员:
unsigned long vm_start; /* Our start address within vm_mm. */ unsigned long vm_end; /* The first byte after our end address within vm_mm. */ unsigned long vm_flags; /* Flags, see mm.h. 该区域的标记。如VM_IO(该VMA标记为内存映射的IO区域,会阻止系统将该区域包含在进程的存放转存中)和VM_RESERVED(标志内存区域不能被换出)。*/
4.mmap设备操作:
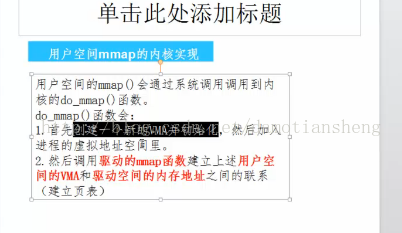
映射一个设备是指把用户空间的一段地址(虚拟地址区间)关联到设备内存上,当程序读写这段用户空间的地址时,它实际上是在访问设备。
mmap方法是file_operations结构的成员,在mmap系统调用的发出时被调用。在此之前,内核已经完成了很多工作。
mmap设备方法所需要做的就是建立虚拟地址到物理地址的页表(虚拟地址和设备的物理地址的关联通过页表)。
static int mmap(struct file *file, struct vm_area_struct *vma);
mmap如何完成页表的建立?(两种方法)
(1)使用remap_pfn_range一次建立所有页表。

int remap_pfn_range(struct vm_area_struct *vma, unsigned long addr, unsigned long pfn, unsigned long size, pgprot_t prot); /** * remap_pfn_range - remap kernel memory to userspace * @vma: user vma to map to:内核找到的虚拟地址区间 * @addr: target user address to start at:要关联的虚拟地址 * @pfn: physical address of kernel memory:要关联的设备的物理地址,也即要映射的物理地址所在的物理帧号,可将物理地址>>PAGE_SHIFT * @size: size of map area * @prot: page protection flags for this mapping * * Note: this is only safe if the mm semaphore is held when called. */
(2)使用nopage VMA方法每次建立一个页表;
5.源码分析:
(1)memdev.h
#ifndef _MEMDEV_H_
#define _MEMDEV_H_
#ifndef MEMDEV_MAJOR
#define MEMDEV_MAJOR 452
/*预设的mem的主设备号*/
#endif
#ifndef MEMDEV_NR_DEVS
#define MEMDEV_NR_DEVS 2 /*设备数*/
#endif
#ifndef MEMDEV_SIZE
#define MEMDEV_SIZE 4096//分配内存的大小
#endif
/*mem设备描述结构体*/
struct mem_dev
{
char *data; //分配到的内存的起始地址
unsigned long size; //内存的大小
};
#endif /* _MEMDEV_H_ */(2)memdev.c
#include <linux/module.h>
#include <linux/types.h>
#include <linux/fs.h>
#include <linux/errno.h>
#include <linux/mm.h>
#include <linux/sched.h>
#include <linux/init.h>
#include <linux/cdev.h>
#include <asm/io.h>
//#include <asm/system.h>
#include <linux/slab.h>
#include <asm/uaccess.h>
#include "memdev.h"
static int mem_major = MEMDEV_MAJOR;
module_param(mem_major, int, S_IRUGO);
struct mem_dev *mem_devp; /*设备结构体指针*/
struct cdev cdev;
/*文件打开函数*/
int mem_open(struct inode *inode, struct file *filp)
{
struct mem_dev *dev;
/*获取次设备号*/
int num = MINOR(inode->i_rdev);// inode->i_rdev包含实际的设备编号
if (num >= MEMDEV_NR_DEVS)
return -ENODEV;
dev = &mem_devp[num];
/*将设备描述结构指针赋值给文件私有数据指针*/
filp->private_data = dev;//使用这个成员来指向分配的数据
return 0;
}
/*文件释放函数*/
int mem_release(struct inode *inode, struct file *filp)
{
return 0;
}
/*读函数*/
static ssize_t mem_read(struct file *filp, char __user *buf, size_t size, loff_t *ppos)//buf缓存区,size读取文件大小,ppos当前读写位置
{
unsigned long p = *ppos;//p为当前读写位置
unsigned int count = size;//一次读取的大小
int ret = 0;
struct mem_dev *dev = filp->private_data; /*获得设备结构体指针*/
/*判断读位置是否有效*/
if (p >= MEMDEV_SIZE)//是否超出读取获围
return 0;
if (count > MEMDEV_SIZE - p)
count = MEMDEV_SIZE - p;//count大于可读取的范围,则缩小读取范围。
/*读数据到用户空间*/
if (copy_to_user(buf, (void*)(dev->data + p), count))//返回buf,读取位置,读取数量
{
ret = - EFAULT;
}
else
{
*ppos += count;//将文件当前位置向后移
ret = count;//返回实际读取字节数
printk(KERN_INFO "read %d bytes(s) from %ld\n", count, p);
}
return ret;//返回实际读取字节数,判断读取是否成功
}
/*写函数*/
static ssize_t mem_write(struct file *filp, const char __user *buf, size_t size, loff_t *ppos)//write和read类似,直接参考read
{
unsigned long p = *ppos;
unsigned int count = size;
int ret = 0;
struct mem_dev *dev = filp->private_data; /*获得设备结构体指针*/
/*分析和获取有效的写长度*/
if (p >= MEMDEV_SIZE)
return 0;
if (count > MEMDEV_SIZE - p)
count = MEMDEV_SIZE - p;
/*从用户空间写入数据*/
if (copy_from_user(dev->data + p, buf, count))
ret = - EFAULT;
else
{
*ppos += count;
ret = count;
printk(KERN_INFO "written %d bytes(s) from %ld\n", count, p);
}
return ret;
}
/* seek文件定位函数 */
static loff_t mem_llseek(struct file *filp, loff_t offset, int whence)//作改变文件中的当前读/写位置, 并且新位置作为(正的)返回值在测试程序中要重新定位文件位置,whence这里被设置为 SEEK_SET
{
loff_t newpos;
switch(whence) {
case 0: /* SEEK_SET */
newpos = offset;//从文件头开始定位
break;
case 1: /* SEEK_CUR */
newpos = filp->f_pos + offset;//从文件中间定位
break;
case 2: /* SEEK_END */
newpos = MEMDEV_SIZE -1 + offset;//从文件尾开始定位,由于是从0开始,所以要减1
break;
default: /* can't happen */
return -EINVAL;
}
if ((newpos<0) || (newpos>MEMDEV_SIZE))
return -EINVAL;
filp->f_pos = newpos;//返回当前文件位置
return newpos;
}
static int memdev_mmap(struct file*filp, struct vm_area_struct *vma)
{
struct mem_dev *dev = filp->private_data; /*获得设备结构体指针*/
vma->vm_flags |= VM_IO;
vma->vm_flags |= (VM_DONTEXPAND | VM_DONTDUMP);
if (remap_pfn_range(vma,vma->vm_start,virt_to_phys(dev->data)>>PAGE_SHIFT, vma->vm_end - vma->vm_start, vma->vm_page_prot))
return -EAGAIN;
return 0;
}
/*文件操作结构体*/
static const struct file_operations mem_fops =
{
.owner = THIS_MODULE,
.llseek = mem_llseek,
.read = mem_read,
.write = mem_write,
.open = mem_open,
.release = mem_release,
.mmap = memdev_mmap,
};
/*设备驱动模块加载函数*/
static int memdev_init(void) //初始化模块
{
int result;
int i;
dev_t devno = MKDEV(mem_major, 0);//MKDEV是将主设备号和次设备号转换为dev_t类型数据,参数mem_major在头文件中预设为254
/* 静态申请设备号*/
if (mem_major)//memdev.h 中定义了为254。所以本例为静态分配主设备号254
result = register_chrdev_region(devno, 2, "memdev");//devno为主设备号,共申请两个连续的设备,设备名为"memdev"
else /* 动态分配设备号 */
{
result = alloc_chrdev_region(&devno, 0, 2, "memdev");//&devno作为一个输出参数,次设备号从0开始分配,申请2个设备,设备名为"memdev"
mem_major = MAJOR(devno);//获取动态分配到的主设备号。
}
if (result < 0)//result返回0时为申请成功,反加负值为申请失败。
return result;
/*初始化cdev结构*/
cdev_init(&cdev, &mem_fops);//初始化cdev结构,将结构体cdev和mem_fops绑定起来
cdev.owner = THIS_MODULE;//驱动引用计数,作用是这个驱动正在使用的时候,你再次用inmod命令时,出现警告提示
cdev.ops = &mem_fops;
/* 注册字符设备 */
cdev_add(&cdev, MKDEV(mem_major, 0), MEMDEV_NR_DEVS);//MEMDEV_NR_DEVS=2,分配2个设备
/* 为设备描述结构分配内存*/
mem_devp = kmalloc(MEMDEV_NR_DEVS * sizeof(struct mem_dev), GFP_KERNEL);//kmalloc函数返回的是虚拟地址(线性地址).
if (!mem_devp) /*申请失败*/
{
result = - ENOMEM;
goto fail_malloc;
}
memset(mem_devp, 0, sizeof(struct mem_dev));//新申请的内存做初始化工作
/*为设备分配内存*/
for (i=0; i < MEMDEV_NR_DEVS; i++)
{
mem_devp[i].size = MEMDEV_SIZE;//#define MEMDEV_SIZE 4096
mem_devp[i].data = kmalloc(MEMDEV_SIZE, GFP_KERNEL);//分配内存给两个设备
memset(mem_devp[i].data, 0, MEMDEV_SIZE);//初始化新分配到的内存
}
return 0;
fail_malloc:
unregister_chrdev_region(devno, 1);//如果申请失败,注销设备
return result;
}
/*模块卸载函数*/
static void memdev_exit(void)
{
cdev_del(&cdev); /*注销设备*/
kfree(mem_devp); /*释放设备结构体内存*/
unregister_chrdev_region(MKDEV(mem_major, 0), 2); /*释放设备号*/
}
MODULE_AUTHOR("David Xie");
MODULE_LICENSE("GPL");
module_init(memdev_init);
module_exit(memdev_exit);
(3)test.c:
#include <stdio.h>
#include<sys/types.h>
#include<sys/stat.h>
#include<fcntl.h>
#include<unistd.h>
#include<sys/mman.h>
int main()
{
int fd;
char *start;
//char buf[100];
char *buf;
/*打开文件*/
fd = open("/dev/memdev0",O_RDWR);
buf = (char *)malloc(100);
memset(buf, 0, 100);
start=mmap(NULL,100,PROT_READ|PROT_WRITE,MAP_SHARED,fd,0);
/* 读出数据 */
strcpy(buf,start);
sleep (1);
printf("buf 1 = %s\n",buf);
/* 写入数据 */
strcpy(start,"Buf Is Not Null!");
memset(buf, 0, 100);
strcpy(buf,start);
sleep (1);
printf("buf 2 = %s\n",buf);
munmap(start,100); /*解除映射*/
free(buf);
close(fd);
return 0;
}测试步骤:
(1)编译安装内核模块:insmod memdev.ko;
(2)查看设备名、主设备号:cat /proc/devices
(3)手工创建设备节点:mknod /dev/memdev0 c 452 0; mknod /dev/memdev0 c 452 1
查看设备文件是否存在:ls -l /dev/* | grep memdev*
(4)编译下载运行应用程序:sudo ./test 最好用超级用户权限运行,否则有时会出现权限问题,有时不出现权限的提示;
结果:buf 1 =
buf 2 = Buf Is Not Null!
总结:
1. mmap设备方法实现将用户空间的一段内存关联到设备内存上,对用户空间的读写就相当于对字符设备的读写;不是所有的设备都能进行mmap抽象,比如像串口和其他面向流的设备就不能做mmap抽象。
2. 设备号要确保唯一,不与当前系统中设备号冲突,否则会出现device busy的提示;
3. 用户空间调用mmap函数,要确保驱动中实现了对应的mmap函数;
用c函数测试( 此时要用sudo运行test,否则会提示 Open Memdev0 Error!)// test.c:
#include <stdio.h>
int main()
{
FILE *fp0 = NULL;
char Buf[4096];
/*初始化Buf*/
strcpy(Buf,"Mem is char dev!");
printf("BUF: %s\n",Buf);
/*打开设备文件*/
fp0 = fopen("/dev/memdev0","r+");
if (fp0 == NULL)
{
printf("Open Memdev0 Error!\n");
return -1;
}
/*写入设备*/
fwrite(Buf, sizeof(Buf), 1, fp0);
/*重新定位文件位置(思考没有该指令,会有何后果)*/
fseek(fp0,0,SEEK_SET);//调用mem_llseek()定位
/*清除Buf*/
strcpy(Buf,"Buf is NULL!");
printf("BUF: %s\n",Buf);
/*读出设备*/
fread(Buf, sizeof(Buf), 1, fp0);
/*检测结果*/
printf("BUF: %s\n",Buf);
return 0;
}用系统调用测试:
#include <sys/stat.h>
#include <fcntl.h>
#include <stdio.h>
#include <stdlib.h>
void main(void)
{
int fd;
int i;
char data[256];
int retval;
fd = open("/dev/memdev1",O_RDWR);
if(fd==-1)
{
perror("erroropen\n");
exit(-1);
}
printf("open/dev/memdev1 successfully\n");
//写数据
retval = write(fd,"test",4);
if(retval==-1)
{
perror("write error\n");
exit(-1);
}
printf("write successfully\n");
//读数据
lseek( fd, 0, SEEK_SET );
retval=read(fd,data,4);
if(retval==-1)
{
perror("read error\n");
exit(-1);
}
data[retval]=0;
printf("read successfully:%s\n",data);
//关闭设备
close(fd);
} 















 959
959

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









