







对模型的平移和旋转等操作是我们在做三维软件开发时必然会解决的事情。但是由于基本变换默认是以世界坐标系的原点为变换中心,所以我们在进行平移旋转等操作时往往会发现其并非如我们想象的那样去执行。举个简单的例子:当对物体进行先x轴方向20个单位的平移操作,再将物体绕自身z轴旋转60度的操作时。我们希望的是左图所示结果,但往往我们得到的是右图的结果(Z轴未标出)。


问题出现的原因就在于我们想要的是以物体自身的中心为变换中心,而实际得到的却是以世界坐标的原点为变换中心的。为了解决这个问题,最好的办法就是先将物体的变换中心移到世界坐标的原点,再进行级联变换,然后再将物体移回原先的位置。
在osg中可以按照以下步骤进行:
1)osg场景中的物体通常是以Node节点的形式存在的,所以我们需将变换的物体转换成osg::MatrixTransform类型,再通过getMatrix()方法得到当前矩阵。
2)为了将物体中心同世界坐标原点重合,需获得物体中心。可以采用getBound()或getSphere()方法获取模型包围盒,再采用包围盒的center()方法获得包围盒中心即为物体中心。
3)按上述方法变换模型。
实现代码如下所示:
osg::MatrixTransform* picked= static_cast<osg::MatrixTransform*>(pNode); //转换成MatrixTransform
osg::Vec3d center= picked->getBound().center(); //获得包围盒中心
osg::Matrixd originPos= picked->getMatrix(); //获得当前矩阵
picked->setMatrix(originPos*osg::Matrixd::translate(-center) //先将物体中心平移到世界坐标的原点
*osg::Matrixd::scale(0.5,0.5, 0.5) //缩放
*osg::Matrixd::rotate(osg::DegreesToRadians(60.0),0,0,1)//旋转
*osg::Matrixd::translate(20,0,0)//平移
*osg::Matrixd::translate(center));//变换后再将物体移回对于单一的矩阵挂接,上述问题似乎很容易就得到了解决。但是,在实际的模型或许并没那么简单,往往是在多重的矩阵挂接下才得到模型的位置。而我们通过上述的getMatrix()方法得到的仅仅是模型的当前矩阵,还有父级矩阵甚至是父父级矩阵等。此时我们需要做的步骤仍是上述操作,但是需先得到物体世界坐标位置,并将其移到世界坐标原点,再进行级联变换,最后将其移回原先位置。
我们先来看一个这样的例子,场景如下:
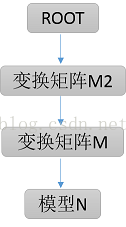
根据上述讨论我们知道,最后模型的世界坐标被变换为:
N*M*M2
现在,若对模型进行平移变换T,由于我们本意是对模型N本身坐标系进行变换,所以本应得到以下变换公式:
设矩阵B= osg::Matrix::translate(-(center*M*M2)) //移回坐标原点
C=osg::Matrix::translate(center*M*M2) //移回原先位置
N*M*M2*B*T*C
显然,我们所需要变换的仅仅是矩阵M,而不能在ROOT和M2之间加一个B*T*C,因此就有了下列公式:
M重新赋值为 N*(M*M2)*B*T*C*inv(M*M2)*M
这样,新的场景图则对应于:
N*(M*M2)*B*T*C*inv(M*M2)*M*M2=N*M*M2*B*T*C
具体代码如下:
osg::MatrixTransform* picked= static_cast<osg::MatrixTransform*>(pNode);
osg::Matrixd originPos= picked->getMatrix();
osg::Vec3d center= picked->getBound().center();
osg::Node* pParentNode;
osg::MatrixTransform* pParent;
pParentNode= pNode->getParent(0);
pParent= dynamic_cast<osg::MatrixTransform*>(pParentNode);
while(pParent!= NULL)
{
originPos= originPos*pParent->getMatrix();
pParentNode= pParentNode->getParent(0);
pParent= dynamic_cast<osg::MatrixTransform*>(pParentNode);
}
osg::Matrixd inverseAll= osg::Matrixd::inverse(originPos)*picked->getMatrix();
osg::Vec3d originCenter=center*(osg::Matrixd::inverse(picked->getMatrix())*originPos);
picked->setMatrix(originPos*osg::Matrix::translate(-originCenter)
*osg::Matrixd::scale(0.5,0.5, 0.5)
*osg::Matrix::rotate(osg::Quat(osg::DegreesToRadians(60.0),0,0,1))
*osg::Matrix::translate(20,0, 0)
*osg::Matrix::translate(originCenter)*invertAll);在上述代码中,originPos最终得到的是模型在世界坐标下的变换矩阵,osg中常常将其命名为localToWorld,也就是局部到世界的转变,而对其求逆则称为worldToLocal,显然是世界到局部的转变。关于这两个矩阵获得,osg中还有一些自带的函数去获得(上述方法可以说是最原始的获取方法),具体可以查看osg源码或帮助文档中MatrixTransform类或是osgManipulator类等,在此就不在详细讨论。
本文摘自:osg中三维模型的位置变换_wxx19945的博客-CSDN博客















 79
79











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









