







I2C内核架构分析
本章以linux3.14.0为参考, 讨论Linux中的i2c控制器驱动是如何实现的。
驱动入口
三星的i2c控制器驱动是基于platform总线实现的,struct platform_driver定义如下:


当设备树节点信息的compatible信息和注册的platform_driver.driver. of_match_table字符串会通过platform总线的macth方法进行配对,匹配成功后会调用probe函数s3c24xx_i2c_probe()。
驱动核心结构
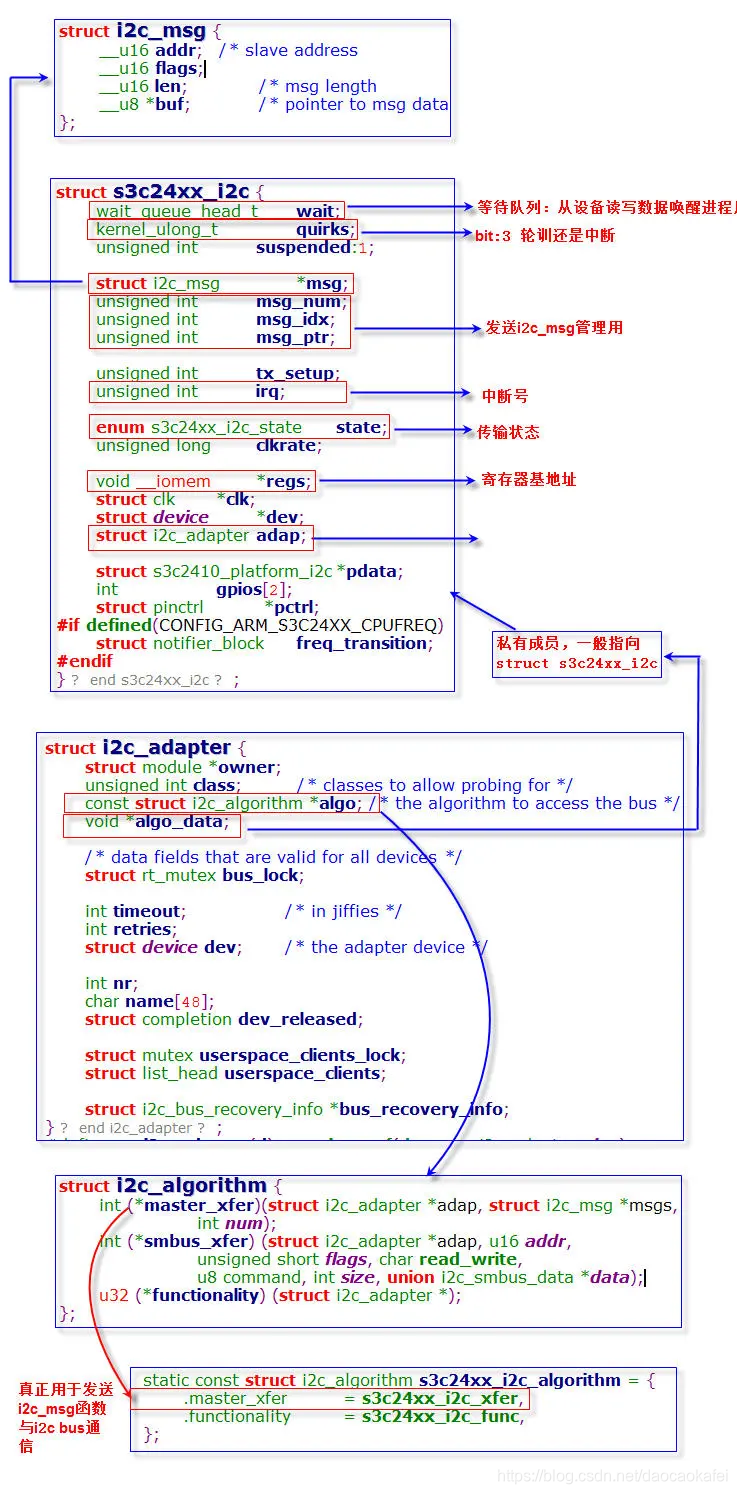
要理解i2c的内核架构首先必须了解一下这几个机构体:
s3c24xx_i2c
该结构体是三星i2c控制器专用结构体,描述了控制器的所有资源,包括用于等待中断唤醒的等待队列、传输i2c_msg的临时指针、记录与硬件通信的状态、中断号、控制器基地址、时钟、i2c_adapter、设备树信息pdata等。i2c控制器初始化的时候会为该控制器创建该结构体变量,并初始化之。
i2c_adapter
对象实现了一组通过一个i2c控制器发送消息的所有信息, 包括时序, 地址等等, 即封装了i2c控制器的"控制信息"。它被i2c主机驱动创建, 通过clien域和i2c_client和i2c_driver相连, 这样设备端驱动就可以通过其中的方法以及i2c物理控制器来和一个i2c总线的物理设备进行交互。
i2c_algorithm
描述一个i2c主机的发送时序的信息,该类的对象algo是i2c_adapter的一个域,其中注册的函数master_xfer()最终被设备驱动端的i2c_transfer()回调。
i2c_msg
描述一个在设备端和主机端之间进行流动的数据, 在设备驱动中打包并通过i2c_transfer()发送。相当于skbuf之于网络设备,urb之于USB设备。
这几个结构体之间关系:
i2c_client
描述一个挂接在硬件i2c总线上的设备的设备信息,即i2c设备的设备对象,与i2c_driver对象匹配成功后通过detected和i2c_driver以及i2c_adapter相连,在控制器驱动与控制器设备匹配成功后被控制器驱动通过i2c_new_device()创建。从设备所挂载的i2c控制器会在初始化的时候保存到成员adapter。
i2c_driver
描述一个挂接在硬件i2c总线上的设备的驱动方法,即i2c设备的驱动对象,通过i2c_bus_type和设备信息i2c_client匹配,匹配成功后通过clients和i2c_client对象以及i2c_adapter对象相连。
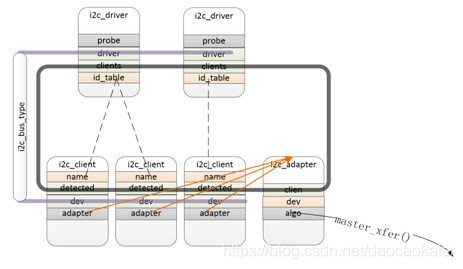
如上图所示:Linux内核维护了i2c bus总线,所有的i2c从设备信息都会转换成i2c_client,并注册到i2c总线,没有设备的情况下一般填写在一下文件中:
linux-3.14-fs4412\arch\arm\mach-s5pc100\ Mach-smdkc100.c

内核启动会将i2c_board_info结构体转换成i2c_client。
有设备树的情况下,内核启动会自动将设备树节点转换成i2c_client。
i2c_adapter
我首先说i2c_adapter, 并不是编写一个i2c设备驱动需要它, 通常我们在配置内核的时候已经将i2c控制器的设备信息和驱动已经编译进内核了, 就是这个adapter对象已经创建好了, 但是了解其中的成员对于理解i2c驱动框架非常重要, 所有的设备驱动都要经过这个对象的处理才能和物理设备通信
//include/linux/i2c.h
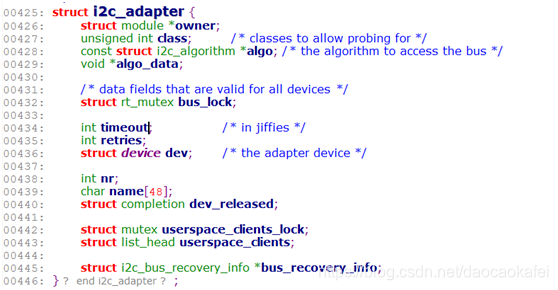
- 428–>这个i2c控制器需要的控制算法, 其中最重要的成员是master_xfer()接口, 这个接口是硬件相关的, 里面的操作都是基于具体的SoC i2c寄存器的, 它将完成将数据发送到物理i2c控制器的"最后一公里"
- 436–>表示这个一个device, 会挂接到内核中的链表中来管理, 其中的
- 443–>这个节点将一个i2c_adapter对象和它所属的i2c_client对象以及相应的i2c_driver对象连接到一起
下面是2个i2c-core.c提供的i2c_adapter直接相关的操作API, 通常也不需要设备驱动开发中使用。
Adapter初始化
i2c控制器设备树节点信息通过platform总线传递下来,即参数pdev。probe函数主要功能是初始化adapter,申请i2c控制器需要的各种资源,同时通过设备树节点初始化该控制器下的所有从设备,创建i2c_client结构体。
ps3c24xx_i2c_probe
static int s3c24xx_i2c_probe(struct platform_device *pdev)
{
struct s3c24xx_i2c *i2c;//最重要的结构体
//保存设备树信息
struct s3c2410_platform_i2c *pdata = NULL;
struct resource *res;
int ret;
if (!pdev->dev.of_node) {
pdata = dev_get_platdata(&pdev->dev);
if (!pdata) {
dev_err(&pdev->dev, "no platform data\n");
return -EINVAL;
}
}
/*为结构体变量i2c分配内存*/
i2c = devm_kzalloc(&pdev->dev, sizeof(struct s3c24xx_i2c), GFP_KERNEL);
if (!i2c) {
dev_err(&pdev->dev, "no memory for state\n");
return -ENOMEM;
}
i2c->pdata = devm_kzalloc(&pdev->dev, sizeof(*pdata), GFP_KERNEL);
if (!i2c->pdata) {
dev_err(&pdev->dev, "no memory for platform data\n");
return -ENOMEM;
}
/*i2c控制器的一些特殊行为
#define QUIRK_S3C2440 (1 << 0)
#define QUIRK_HDMIPHY (1 << 1)
#define QUIRK_NO_GPIO (1 << 2)
#define QUIRK_POLL (1 << 3)
其中bite:3如果采用轮训方式与底层硬件通信值为1,中断方式值为0*/
i2c->quirks = s3c24xx_get_device_quirks(pdev);
if (pdata)
memcpy(i2c->pdata, pdata, sizeof(*pdata));
else
s3c24xx_i2c_parse_dt(pdev->dev.of_node, i2c);
strlcpy(i2c->adap.name, "s3c2410-i2c", sizeof(i2c->adap.name));
i2c->adap.owner = THIS_MODULE;
/*为i2c_msg传输方法赋值,*/
i2c->adap.algo = &s3c24xx_i2c_algorithm;
i2c->adap.retries = 2;
i2c->adap.class = I2C_CLASS_HWMON | I2C_CLASS_SPD;
i2c->tx_setup = 50;
//初始化等待队列,该等待队列用于唤醒读写数据的进程
init_waitqueue_head(&i2c->wait);
/* find the clock and enable it */
i2c->dev = &pdev->dev;
//获取时钟
i2c->clk = devm_clk_get(&pdev->dev, "i2c");
if (IS_ERR(i2c->clk)) {
dev_err(&pdev->dev, "cannot get clock\n");
return -ENOENT;
}
dev_dbg(&pdev->dev, "clock source %p\n", i2c->clk);
/* map the registers */
//通过pdev得到i2c控制器的寄存器地址资源
res = platform_get_resource(pdev, IORESOURCE_MEM, 0);
//映射i2c控制器的物理基地址为虚拟基地址
i2c->regs = devm_ioremap_resource(&pdev->dev, res);
if (IS_ERR(i2c->regs))
return PTR_ERR(i2c->regs);
dev_dbg(&pdev->dev, "registers %p (%p)\n",
i2c->regs, res);
/* setup info block for the i2c core */
/*将结构体变量i2c保存到i2c_adapter的私有变量指针algo_data,
编写i2c设备驱动可以通过adapter指针找到结构体i2c*/
i2c->adap.algo_data = i2c;
i2c->adap.dev.parent = &pdev->dev;
i2c->pctrl = devm_pinctrl_get_select_default(i2c->dev);
/* inititalise the i2c gpio lines */
//得到i2c复用的gpio引脚并初始化
if (i2c->pdata->cfg_gpio) {
i2c->pdata->cfg_gpio(to_platform_device(i2c->dev));
} else if (IS_ERR(i2c->pctrl) && s3c24xx_i2c_parse_dt_gpio(i2c)) {
return -EINVAL;
}
/* initialise the i2c controller */
clk_prepare_enable(i2c->clk);
/*将从设备地址写入寄存器S3C2410_IICADD,同时初始化时钟频率*/
ret = s3c24xx_i2c_init(i2c);
clk_disable_unprepare(i2c->clk);
if (ret != 0) {
dev_err(&pdev->dev, "I2C controller init failed\n");
return ret;
}
/* find the IRQ for this unit (note, this relies on the init call to
* ensure no current IRQs pending
*/
if (!(i2c->quirks & QUIRK_POLL)) {
/*从plat_device中获得中断号*/
i2c->irq = ret = platform_get_irq(pdev, 0);
if (ret <= 0) {
dev_err(&pdev->dev, "cannot find IRQ\n");
return ret;
}
/*注册中断处理函数s3c24xx_i2c_irq()*/
ret = devm_request_irq(&pdev->dev, i2c->irq, s3c24xx_i2c_irq, 0,
dev_name(&pdev->dev), i2c);
if (ret != 0) {
dev_err(&pdev->dev, "cannot claim IRQ %d\n", i2c->irq);
return ret;
}
}
ret = s3c24xx_i2c_register_cpufreq(i2c);
if (ret < 0) {
dev_err(&pdev->dev, "failed to register cpufreq notifier\n");
return ret;
}
/* Note, previous versions of the driver used i2c_add_adapter()
* to add the bus at any number. We now pass the bus number via
* the platform data, so if unset it will now default to always
* being bus 0.
*/
/*保存i2c控制器的通道号,本例是bus 5*/
i2c->adap.nr = i2c->pdata->bus_num;
i2c->adap.dev.of_node = pdev->dev.of_node;
//注册adapter
ret = i2c_add_numbered_adapter(&i2c->adap);
if (ret < 0) {
dev_err(&pdev->dev, "failed to add bus to i2c core\n");
s3c24xx_i2c_deregister_cpufreq(i2c);
return ret;
}
/*保存私有变量i2c到pdev->dev->p->driver_data*/
platform_set_drvdata(pdev, i2c);
pm_runtime_enable(&pdev->dev);
pm_runtime_enable(&i2c->adap.dev);
dev_info(&pdev->dev, "%s: S3C I2C adapter\n", dev_name(&i2c->adap.dev));
return 0;
}
i2c_add_numbered_adapter
老版本的注册函数为i2c_add_adapter()新的版本对该函数做了封装,将i2c控制的通道号做了注册,默认情况下nr值为0.
i2c_add_numbered_adapter->__i2c_add_numbered_adapter-> i2c_register_adapter
int i2c_add_numbered_adapter(struct i2c_adapter *adap)
{
if (adap->nr == -1) /* -1 means dynamically assign bus id */
return i2c_add_adapter(adap);
return __i2c_add_numbered_adapter(adap);
}
i2c_add_adapter
static int i2c_register_adapter(struct i2c_adapter *adap)
{
int res = 0;
/* Can't register until after driver model init */
if (unlikely(WARN_ON(!i2c_bus_type.p))) {
res = -EAGAIN;
goto out_list;
}
/* Sanity checks */
if (unlikely(adap->name[0] == '\0')) {
pr_err("i2c-core: Attempt to register an adapter with "
"no name!\n");
return -EINVAL;
}
if (unlikely(!adap->algo)) {
pr_err("i2c-core: Attempt to register adapter '%s' with "
"no algo!\n", adap->name);
return -EINVAL;
}
rt_mutex_init(&adap->bus_lock);
mutex_init(&adap->userspace_clients_lock);
INIT_LIST_HEAD(&adap->userspace_clients);
/* Set default timeout to 1 second if not already set */
if (adap->timeout == 0)
adap->timeout = HZ;
//设置adapter名字,本例注册后会生成以下节点/dev/i2c-5
dev_set_name(&adap->dev, "i2c-%d", adap->nr);
adap->dev.bus = &i2c_bus_type;
adap->dev.type = &i2c_adapter_type;
res = device_register(&adap->dev);
if (res)
goto out_list;
dev_dbg(&adap->dev, "adapter [%s] registered\n", adap->name);
#ifdef CONFIG_I2C_COMPAT
res = class_compat_create_link(i2c_adapter_compat_class, &adap->dev,
adap->dev.parent);
if (res)
dev_warn(&adap->dev,
"Failed to create compatibility class link\n");
#endif
/* bus recovery specific initialization */
/*初始化sda、scl,通常这两个引脚会复用gpio引脚*/
if (adap->bus_recovery_info) {
struct i2c_bus_recovery_info *bri = adap->bus_recovery_info;
if (!bri->recover_bus) {
dev_err(&adap->dev, "No recover_bus() found, not using recovery\n");
adap->bus_recovery_info = NULL;
goto exit_recovery;
}
/* Generic GPIO recovery */
if (bri->recover_bus == i2c_generic_gpio_recovery) {
if (!gpio_is_valid(bri->scl_gpio)) {
dev_err(&adap->dev, "Invalid SCL gpio, not using recovery\n");
adap->bus_recovery_info = NULL;
goto exit_recovery;
}
if (gpio_is_valid(bri->sda_gpio))
bri->get_sda = get_sda_gpio_value;
else
bri->get_sda = NULL;
/*sda、scl资源赋值*/
bri->get_scl = get_scl_gpio_value;
bri->set_scl = set_scl_gpio_value;
} else if (!bri->set_scl || !bri->get_scl) {
/* Generic SCL recovery */
dev_err(&adap->dev, "No {get|set}_gpio() found, not using recovery\n");
adap->bus_recovery_info = NULL;
}
}
exit_recovery:
/* create pre-declared device nodes */
/*通过设备树节点注册所有该控制器下的所有从设备*/
of_i2c_register_devices(adap);
acpi_i2c_register_devices(adap);
/*与动态分配的总线号相关,动态分配的总线号应该是从已经现有最大总线号基础上+1的,
这样能够保证动态分配出的总线号与板级总线号不会产生冲突
在没有设备树情况下,会基于队列__i2c_board_list, 创建i2c_client
其中节点struct i2c_board_info手动填写*/
if (adap->nr < __i2c_first_dynamic_bus_num)
i2c_scan_static_board_info(adap);
/* Notify drivers */
mutex_lock(&core_lock);
bus_for_each_drv(&i2c_bus_type, NULL, adap, __process_new_adapter);
mutex_unlock(&core_lock);
return 0;
out_list:
mutex_lock(&core_lock);
idr_remove(&i2c_adapter_idr, adap->nr);
mutex_unlock(&core_lock);
return res;
}
of_i2c_register_devices
该函数用于将从设备节点转换成i2c_client,并注册到i2c总线上。
static void of_i2c_register_devices(struct i2c_adapter *adap)
{
void *result;
struct device_node *node;
/* Only register child devices if the adapter has a node pointer set */
if (!adap->dev.of_node)
return;
dev_dbg(&adap->dev, "of_i2c: walking child nodes\n");
for_each_available_child_of_node(adap->dev.of_node, node) {
struct i2c_board_info info = {};
struct dev_archdata dev_ad = {};
const __be32 *addr;
int len;
dev_dbg(&adap->dev, "of_i2c: register %s\n", node->full_name);
if (of_modalias_node(node, info.type, sizeof(info.type)) < 0) {
dev_err(&adap->dev, "of_i2c: modalias failure on %s\n",
node->full_name);
continue;
}
/*获取从设备的地址*/
addr = of_get_property(node, "reg", &len);
if (!addr || (len < sizeof(int))) {
dev_err(&adap->dev, "of_i2c: invalid reg on %s\n",
node->full_name);
continue;
}
/*存储从设备地址*/
info.addr = be32_to_cpup(addr);
if (info.addr > (1 << 10) - 1) {
dev_err(&adap->dev, "of_i2c: invalid addr=%x on %s\n",
info.addr, node->full_name);
continue;
}
/*获取中断号*/
info.irq = irq_of_parse_and_map(node, 0);
info.of_node = of_node_get(node);
info.archdata = &dev_ad;
/*获取设备树节点wakeup-source信息*/
if (of_get_property(node, "wakeup-source", NULL))
info.flags |= I2C_CLIENT_WAKE;
request_module("%s%s", I2C_MODULE_PREFIX, info.type);
/*将i2c_board_info转换成i2c_client并注册到i2c总线*/
result = i2c_new_device(adap, &info);
if (result == NULL) {
dev_err(&adap->dev, "of_i2c: Failure registering %s\n",
node->full_name);
of_node_put(node);
irq_dispose_mapping(info.irq);
continue;
}
}
}
i2c_new_device ( )
将i2c_board_info转换成i2c_client并注册到Linux核心。
{
struct i2c_client *client;
int status;
/*给i2c_client分配内存*/
client = kzalloc(sizeof *client, GFP_KERNEL);
if (!client)
return NULL;
/*将adapter的地址保存到i2c_client->adapter,
在驱动函数中可以通过i2c_client找到adapter*/
client->adapter = adap;
client->dev.platform_data = info->platform_data;
if (info->archdata)
client->dev.archdata = *info->archdata;
/*保存从设备地址类型*/
client->flags = info->flags;
/*保存从设备地址*/
client->addr = info->addr;
/*保存从设备中断号*/
client->irq = info->irq;
strlcpy(client->name, info->type, sizeof(client->name));
/* Check for address validity */
/*检测从设备地址是否合法,主要检查位数*/
status = i2c_check_client_addr_validity(client);
if (status) {
dev_err(&adap->dev, "Invalid %d-bit I2C address 0x%02hx\n",
client->flags & I2C_CLIENT_TEN ? 10 : 7, client->addr);
goto out_err_silent;
}
/* Check for address business */
/*检测从设备地址是否被占用,同一个控制器下同一个从设备地址只能注册一次*/
status = i2c_check_addr_busy(adap, client->addr);
if (status)
goto out_err;
/*建立从设备与适配器的父子关系*/
client->dev.parent = &client->adapter->dev;
client->dev.bus = &i2c_bus_type;
client->dev.type = &i2c_client_type;
client->dev.of_node = info->of_node;
ACPI_COMPANION_SET(&client->dev, info->acpi_node.companion);
i2c_dev_set_name(adap, client);
/*注册到Linux核心*/
status = device_register(&client->dev);
if (status)
goto out_err;
dev_dbg(&adap->dev, "client [%s] registered with bus id %s\n",
client->name, dev_name(&client->dev));
return client;
out_err:
dev_err(&adap->dev, "Failed to register i2c client %s at 0x%02x "
"(%d)\n", client->name, client->addr, status);
out_err_silent:
kfree(client);
return NULL;
}
i2c_msg如何传递?
核心方法i2c_transfer
l i2c_transfer()是i2c核心提供给设备驱动的发送方法, 通过它发送的数据需要被打包成i2c_msg, 这个函数最终会回调相应i2c_adapter->i2c_algorithm->master_xfer()接口将i2c_msg对象发送到i2c物理控制器,
i2c_adapte->algo在函数s3c24xx_i2c_probe()中赋值:

该变量定义如下:

i2c_transfer()最终会调用函数s3c24xx_i2c_xfer();
i2c_msg中断传输
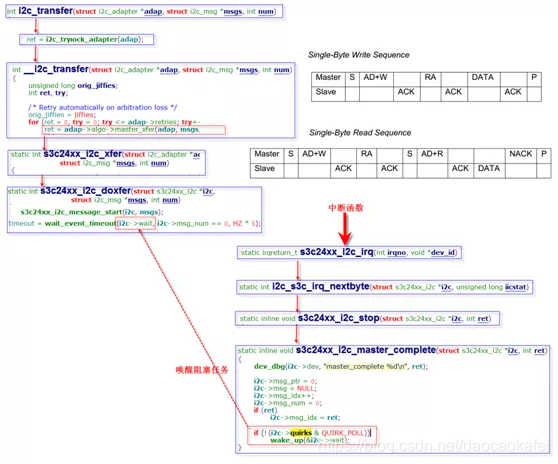
以下是一次i2c_msg传输的中断模式的大概步骤:
-
i2c_transfer()首先通过函数i2c_trylock_adapter()尝试获得adapter的控制权。如果adapter正在忙则返回错误信息;
-
__i2c_transfer()通过调用方法adap->algo->master_xfer(adap, msgs, num)传输i2c_msg,如果失败会尝试重新传送,重传次数最多adap->retries;
-
adap->algo->master_xfer()就是函数s3c24xx_i2c_xfer(),该函数最终调用 s3c24xx_i2c_doxfer(i2c, msgs, num)传输信息;
-
s3c24xx_i2c_doxfer()通过函数 s3c24xx_i2c_message_start(i2c, msgs)产生S和AD+W的信号,然后通过函数wait_event_timeout( )阻塞在等待队列i2c->wait上;
-
右上角时序mpu6050的写和读的时序,从设备回复ACK和DATA都会发送中断信号给CPU。每次中断都会调用s3c24xx_i2c_irq->i2c_s3c_irq_nextbyte,
-
最后一次中断,所有数据发送或读取完毕会调用s3c24xx_i2c_stop->s3c24xx_i2c_master_complete,通过wake_up唤醒阻塞在等待队列i2c->wait上的任务。
详细的代码流程如下:
-
i2c_transfer()首先通过函数i2c_trylock_adapter()尝试获得adapter的控制权。如果adapter正在忙则返回错误信息;
-
__i2c_transfer()通过调用方法adap->algo->master_xfer(adap,msgs, num)传输i2c_msg,如果失败会尝试重新传送,重传次数最多adap->retries;
-
adap->algo->master_xfer()就是函数s3c24xx_i2c_xfer(),该函数最终调用 s3c24xx_i2c_doxfer(i2c, msgs, num)传输信息;
-
s3c24xx_i2c_doxfer()通过函数 s3c24xx_i2c_message_start(i2c, msgs)产生S和AD+W的信号,然后通过函数wait_event_timeout()阻塞在等待队列i2c->wait上;
-
右上角时序mpu6050的写和读的时序,从设备回复ACK和DATA都会发送中断信号给CPU。每次中断都会调用s3c24xx_i2c_irq->i2c_s3c_irq_nextbyte,
-
最后一次中断,所有数据发送或读取完毕会调用s3c24xx_i2c_stop->s3c24xx_i2c_master_complete,通过wake_up唤醒阻塞在等待队列i2c->wait上的任务。
详细的代码流程如下:
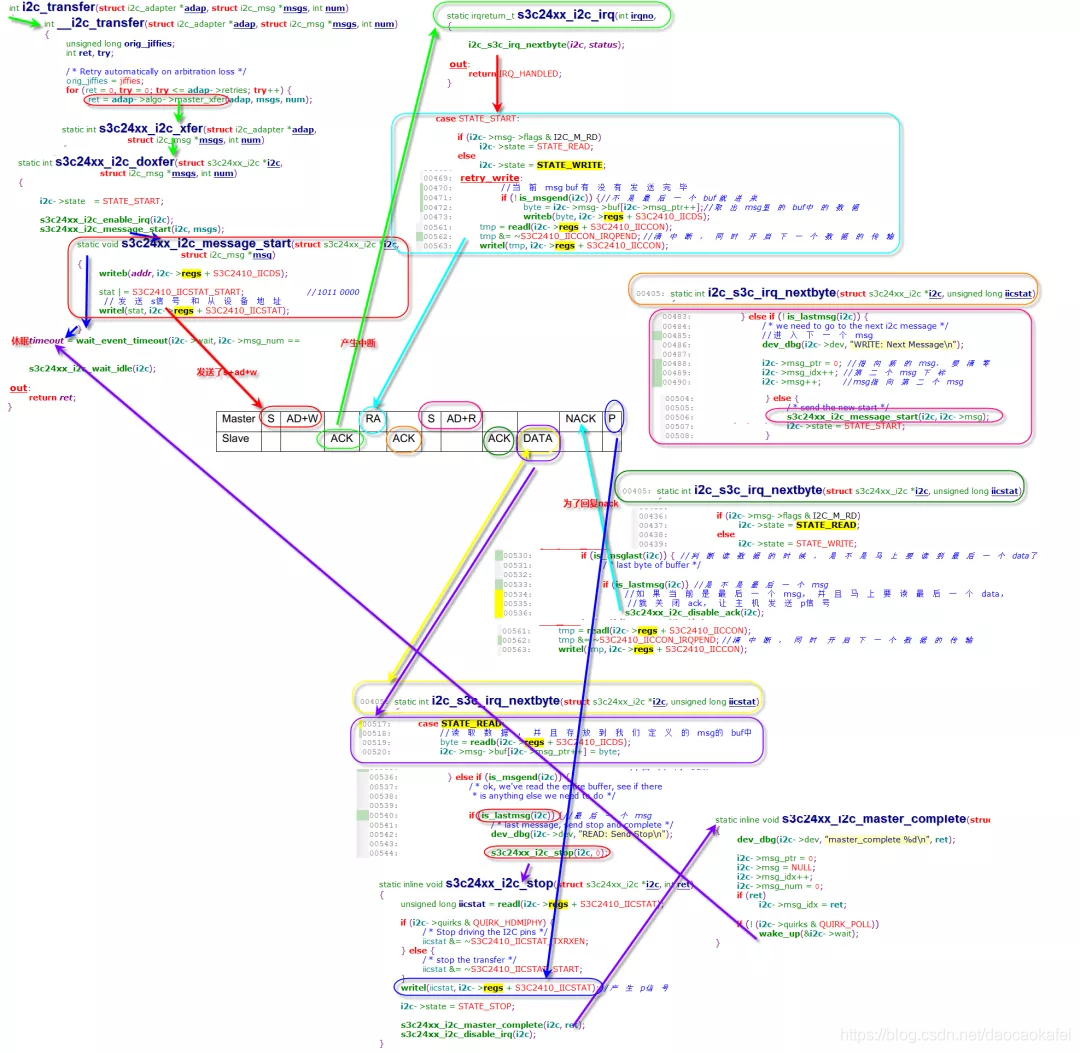
对着可以根据上图代码行号一步步去跟代码,涉及到寄存器设置可以参考第一章的寄存器使用截图。
参考文献:
mpu6050 datasheet、exnos4412 datasheet以及源代码下载请关注订阅号一口Linux,回复‘exynos4412’,即可获取。
关注公众号:一口Linux,更多Linux 驱动相关资料分享给你。















 2193
2193











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











