






常用的IMU陀螺仪计算欧拉角方式为:Cortex M0/M3/M4的单片机+六轴陀螺仪如MPU6050,通过MPU6050自带的DMP库,直接输出四元数q0~q4,然后通过欧拉角转换公式直接转换,如:
pitch = asin(-2 * q1 * q3 + 2 * q0 * q2) * 57.3; //俯仰角
roll = atan2(2 * q2 * q3 + 2 * q0 * q1, -2 * q1 * q1 - 2 * q2 * q2 + 1) * 57.3; //横滚角
yaw = atan2(2 * (q1 * q2 + q0 * q3), q0 * q0 + q1 * q1 - q2 * q2 - q3 * q3) * 57.3; //航向角
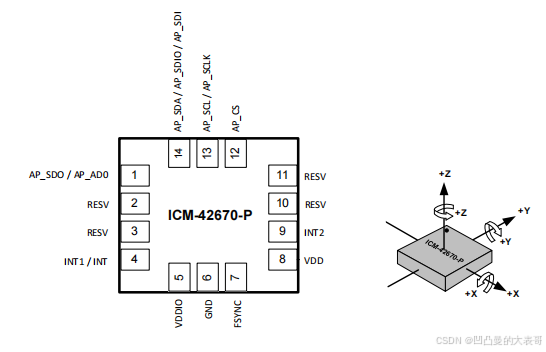
若采用51核的峰岹FU6572N+不带DMP库的ICM42670,可否也能计算出欧拉角呢?
结果当然是OK!并且占用MCU资源少,程序运行快,上电即稳态!
 +
+
关于MCU用IIC或SPI驱动ICM42670的代码网上非常多,可以从别的文章摘录,这里只分享四元数解算欧拉角的方法:
1、第一步配置全局变量:
#include <FU6522.H>
#include "Angle.h"
// 参数配置
#define Kp 10.0f // 比例增益
#define Ki 0.008f // 积分增益
#define halfT 0.01f // 半采样周期(采样率50Hz)
// 全局/静态变量声明
float q0 = 1.0f, q1 = 0.0f, q2 = 0.0f, q3 = 0.0f; // 初始四元数
float exInt = 0.0f, eyInt = 0.0f, ezInt = 0.0f; // 积分误差
float Q_ANGLE_X = 0.0f, Q_ANGLE_Y = 0.0f, Q_ANGLE_Z = 0.0f; // 输出姿态角
2.配置IMU的量程及采样周期等:
因51单片机主频低,采样周期设置小点,50Hz即可;
void ICM42670_Init(void)
{
MPU42670_WriteReg(0x20, 0x6A );//角速度量程 250dps 采样周期50hz
MPU42670_WriteReg(0x21, 0x4A );//加速度计量程4g 采样周期50HZ
MPU42670_WriteReg(0x23, 0x03 );//陀螺仪低通滤波带宽 011:73hz
MPU42670_WriteReg(0x24, 0x76 );//加速度计平均滤波器111:64x 低通滤波带宽110:25HZ
MPU42670_WriteReg(0x06, 0x03 );//011:INT1 推挽输出 高电平有效
MPU42670_WriteReg(0x1F, 0x0F );//1111://将陀螺仪置于低噪声(LN)模式下 加速度计置于低噪声(LN)模式下
}3.读取出IMU内加速度计和陀螺仪的原始数据函数(int16型数据,有符号,满量程±32768):
typedef struct
{
int16 GYRO_X;
int16 GYRO_Y;
int16 GYRO_Z;
uint8 GYRO_Init_Flag;
uint8 GYRO_Ready_Flag;
uint8 DelayInitCnt;
int16 ACCEL_X;
int16 ACCEL_Y;
int16 ACCEL_Z;
} IICTypeDef;
IICTypeDef xdata IIC;
void ICM42670_ReadGyro(void)
{
uint8 buf[7];
MPU42670_ReadData(0x11,buf,6); //读取三轴陀螺仪原始数据
IIC.GYRO_X = ((int16)(buf[0] << 8) | buf[1]);
IIC.GYRO_Y = ((int16)(buf[2] << 8) | buf[3]);
IIC.GYRO_Z = ((int16)(buf[4] << 8) | buf[5]);
}
void ICM42670_ReadACCEL(void)
{
uint8 buf[7];
MPU42670_ReadData(0x0b,buf,6); //读取三轴加速度计原始数据
IIC.ACCEL_X = ((int16)(buf[0] << 8) | buf[1]);
IIC.ACCEL_Y = ((int16)(buf[2] << 8) | buf[3]);
IIC.ACCEL_Z = ((int16)(buf[4] << 8) | buf[5]);
}4.四元数解算欧拉角函数:
参考链接:https://blog.csdn.net/m0_73221129/article/details/128929450
//gx,gy,gz单位为弧度dps,ax,ay,az单位为重力单位g
void Ola_42670(float gx, float gy, float gz, float ax, float ay, float az)
{
float q0temp,q1temp,q2temp,q3temp;//四元数暂存变量,求解微分方程时要用
float norm;
float vx, vy, vz;
float ex, ey, ez;
float q0q0 = q0*q0;
float q0q1 = q0*q1;
float q0q2 = q0*q2;
float q1q1 = q1*q1;
float q1q3 = q1*q3;
float q2q2 = q2*q2;
float q2q3 = q2*q3;
float q3q3 = q3*q3;
if(ax*ay*az==0)//加计处于自由落体状态时不进行姿态解算,因为会产生分母无穷大的情况
return;
norm = invSqrt(ax*ax + ay*ay + az*az);//单位化加速度计,
ax = ax * norm;// 这样变更了量程也不需要修改KP参数,因为这里归一化了
ay = ay * norm;
az = az * norm;
vx = 2*(q1q3 - q0q2);
vy = 2*(q0q1 + q2q3);
vz = q0q0 - q1q1 - q2q2 + q3q3 ;
ex = (ay*vz - az*vy) ;
ey = (az*vx - ax*vz) ;
ez = (ax*vy - ay*vx) ;
exInt = exInt + ex * Ki; //对误差进行积分
eyInt = eyInt + ey * Ki;
ezInt = ezInt + ez * Ki;
gx = gx + Kp*ex + exInt; //将误差PI(比例和积分项)补偿到陀螺仪角速度
gy = gy + Kp*ey + eyInt;
gz = gz + Kp*ez + ezInt;
//下面进行姿态的更新,也就是四元数微分方程的求解
q0temp=q0;
q1temp=q1;
q2temp=q2;
q3temp=q3;
//采用一阶毕卡解法,相关知识可参见《惯性器件与惯性导航系统》P212
q0 = q0temp + (-q1temp*gx - q2temp*gy -q3temp*gz)*halfT;
q1 = q1temp + (q0temp*gx + q2temp*gz -q3temp*gy)*halfT;
q2 = q2temp + (q0temp*gy - q1temp*gz +q3temp*gx)*halfT;
q3 = q3temp + (q0temp*gz + q1temp*gy -q2temp*gx)*halfT;
//单位化四元数在空间旋转时不会拉伸,仅有旋转角度,这类似线性代数里的正交变换
norm = invSqrt(q0*q0 + q1*q1 + q2*q2 + q3*q3);
q0 = q0 * norm;
q1 = q1 * norm;
q2 = q2 * norm;
q3 = q3 * norm;
//四元数到欧拉角的转换
//其中YAW航向角由于加速度计对其没有修正作用,因此此处直接用陀螺仪积分代替
Q_ANGLE_Z = Q_ANGLE_Z + gz*halfT*2*57.3; // yaw
Q_ANGLE_Y = asin(-2 * q1 * q3 + 2 * q0* q2)*57.3; // pitch
Q_ANGLE_X = atan2(2 * q2 * q3 + 2 * q0 * q1,-2 * q1 * q1 - 2 * q2* q2 + 1)* 57.3; // roll
}5.main函数读取并打印欧拉角(单位°):
void main(void)
{
uint16 xdata Uart_tx_delay_time = 0;
HardwareInit();
IIC.GYRO_Ready_Flag = MPU6887_ReadID();
if(IIC.GYRO_Ready_Flag==1) //IMU ID读取
{
ICM42670_Init();
LED5_ON;
}
else if(IIC.GYRO_Ready_Flag!=1)
{
LED5_OFF;
}
while (1)
{
ICM42670_ReadACCEL(); //读取加速度计原始数据,量程4g
ICM42670_ReadGyro(); //读取陀螺仪原始数据,量程250弧度
Ola_42670((float)IIC.GYRO_X*250/32768/57.3, (float)IIC.GYRO_Y*250/32768/57.3, (float)IIC.GYRO_Z*500/57.3/65536, (float)IIC.ACCEL_X*4/32768, (float)IIC.ACCEL_Y*4/32768, (float)IIC.ACCEL_Z*4/32768);
if(Uart_tx_delay_time++ >=500)
{
printf("pitch:%.2f roll:%.2f yaw:%.2f\r\n",Q_ANGLE_X,Q_ANGLE_Y,Q_ANGLE_Z);
Uart_tx_delay_time=0;
}
}
}6.串口打印
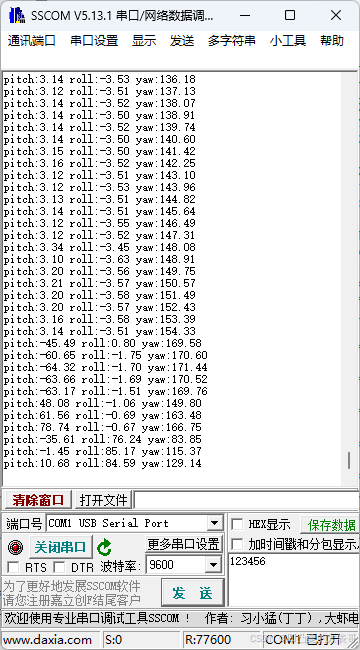
其中偏航角yaw会一直偏移,只有加装磁力计才能解决。
附送匿名上位机V7版本对接程序:
uint8 xdata IMU_Ola_Buff[13]; //欧拉角数据
void IMU_Ola_Data(int16 Roll, int16 Pitch,int16 Yaw) //姿态数据发送
{
int i;
uint8 sumcheck = 0;
uint8 addcheck = 0;
IMU_Ola_Buff[0] = 0xAA; //帧头,匿名上位机固定为0xAA
IMU_Ola_Buff[1] = 0xFF; //目标地址,0xFF代表无特定目标,用于数据广播型输出,可见于通信协议手册
IMU_Ola_Buff[2] = 0X03; //功能码,0X01:惯性传感器数据
IMU_Ola_Buff[3] = 7; //数据长度即字节数 6个传感器数据12字节+1字节震动状态
IMU_Ola_Buff[4] = (Roll*100); //小端模式,低8位在前;直接把16位制数赋值给8位制数Buff[4],这样Buff[4]保留的是A的低8位
IMU_Ola_Buff[5] = (Roll*100)>>8; //先把Roll右移8位,再赋值给给8位制数Buff[5],这样Buff[5]保留的是A的高8位
IMU_Ola_Buff[6] = (Pitch*100);
IMU_Ola_Buff[7] = (Pitch*100)>>8;
IMU_Ola_Buff[8] = (Yaw*100);
IMU_Ola_Buff[9] = (Yaw*100)>>8;
IMU_Ola_Buff[10] = 1;
/**** 校验的部分如下 ****/
for(i = 0; i < (IMU_Ola_Buff[3] + 4); i++)
{
sumcheck += IMU_Ola_Buff[i];
addcheck += sumcheck;
}
IMU_Ola_Buff[11] = sumcheck;
IMU_Ola_Buff[12] = addcheck;
}
IMU_AG_Data(IIC.ACCEL_X,IIC.ACCEL_Y,IIC.ACCEL_Z,IIC.GYRO_X,IIC.GYRO_Y,IIC.GYRO_Z);//填充传感器数据
Sendstring_USART1(IMU_Ola_Buff,sizeof(IMU_Ola_Buff));匿名V7上位机测试视频

















 313
313

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









