









目录
1、map和set的底层
map和set都是基于红黑树实现的。红黑树是一种自平衡的二叉搜索树,它保持着良好的平衡性能,插入、删除、查找的时间复杂度都是O(log n)。在C++ STL中,map和set都是使用红黑树作为底层数据结构来实现的。红黑树在前面文章模拟实现过,可以参考

rep_type通常是用来表示set容器内部红黑树的节点类型。在STL头文件中,通常会定义rep_type作为红黑树节点的类型,用于表示set容器和map容器内部的数据结构。
可以看到set和map的源代码中都使用了红黑树作为底层数据结构。
可以看到红黑树中的数据类型只有一个,
而在map和set中都有key值,也有数据类型,map的数据类型是键值对pair<const key,T>,set中的数据类型也是key。
2、map与set中的key关键值
那么我们该如何模拟实现呢?
🚀map传给红黑树的模板参数是pair键值对
🚀set传给红黑树的模板参数是key值
红黑树该如何判断key值来比较大小呢,这个时候我们需要使用仿函数的方法,因为红黑树比较节点只看key值。我们选择仿函数的方法:
map.h文件:
template<class K,class V>
class MYmap
{
struct KeyofMap
{
const K& operator ()(const pair<K,V> &kv)
{
return kv.first;
}
};
private:
RBTree<K, pair<const K, V>, KeyofMap> _t;
};set.h文件:
template<class T>
class Myset
{
struct SetKeyofvalue
{
const T& operator()(const T& key)
{
return key;
}
};
private:
RBTree<T, const T, SetKeyofvalue> _t;
};
set存放的数据本身就是key,但是为了与红黑树结构:
以及map的结构统一,所以也需要实现一个。
3、红黑树迭代器的实现。
1、++操作
++操作也就是找到下一个比它大的值,那么就有两种可能:
1.右子树的最小值。
//如果右子树不为空,那么比这个元素大的下一个节点就是右子树的最小元素
//也就是右子树的最左节点
2.如果没有右子树,那么向上查找,直到找到一个节点是其父节点的左字数,该父节点就是符合条件的值。
Self& operator++()
{
//如果右子树不为空,那么比这个元素大的下一个节点就是右子树的最小元素
//也就是右子树的最左节点
if (_node->_right)
{
Node* subrm = _node->_right;
while (subrm->_left)
{
subrm = subrm->_left;
}
_node = subrm;
}
//如果右子树为空,那么向上查找,直到找到一个节点是其父节点的左子树
else
{
Node* cur = _node;
Node* parent = cur->_parent;
while (parent&& parent->_right == cur)
{
cur = parent;
parent = parent->_parent;
}
_node = parent;
}
return *this;
}2、-- 操作
--操作也就是找到下一个比它小的值,那么就有两种可能:
1.左子树存在
//找出这个迭代器前面一个比它小的元素,如果左子树存在,那么就先找左边最大的节点
//也就是右子树的最右节点
2.左子树不存在
//如果左子树为空,那么向上查找,直到找到一个节点是其父节点的右子树
Self& operator --()
{
//找出这个迭代器前面一个比它小的元素,如果左子树存在,那么就先找左边最大的节点
//也就是右子树的最右节点
if (_node->_left)
{
Node* sublmax = _node->_left;
while (sublmax->_right)
{
sublmax = sublmax->_right;
}
_node = sublmax;
}
//如果左子树为空,那么向上查找,直到找到一个节点是其父节点的右子树
else
{
Node* cur = _node;
Node* parent = cur->_parent;
while (parent && cur == parent->_left)
{
cur = parent;
parent = parent->_parent;
}
_node = parent;
}
return *this;
}3、==和!=操作
//重载!=运算符
bool operator!=(const Self& s)
{
return _node != s._node;
}
//重载==运算符
bool operator == (const Self & s)
{
return _node == s._node;
}比较的内容是迭代器指向的节点是不是相同,不是比较节点的key值,同时也不需要修改,所以这里只需要const引用即可。
红黑树迭代器完整实现代码:
//红黑树迭代器
template<class T>
struct __RBTreeIterator
{
typedef RBTreeNode<T> Node;
typedef __RBTreeIterator<T> Self;
Node* _node;
__RBTreeIterator(Node* node)
:_node(node)
{}
T& operator *()
{
return _node->_data;
}
T* operator ->()
{
return &_node->_data;
}
Self& operator++()
{
//如果右子树不为空,那么比这个元素大的下一个节点就是右子树的最小元素
//也就是右子树的最左节点
if (_node->_right)
{
Node* subrm = _node->_right;
while (subrm->_left)
{
subrm = subrm->_left;
}
_node = subrm;
}
//如果右子树为空,那么向上查找,直到找到一个节点是其父节点的左子树
else
{
Node* cur = _node;
Node* parent = cur->_parent;
while (parent&& parent->_right == cur)
{
cur = parent;
parent = parent->_parent;
}
_node = parent;
}
return *this;
}
Self& operator --()
{
//找出这个迭代器前面一个比它小的元素,如果左子树存在,那么就先找左边最大的节点
//也就是右子树的最右节点
if (_node->_left)
{
Node* sublmax = _node->_left;
while (sublmax->_right)
{
sublmax = sublmax->_right;
}
_node = sublmax;
}
//如果左子树为空,那么向上查找,直到找到一个节点是其父节点的右子树
else
{
Node* cur = _node;
Node* parent = cur->_parent;
while (parent && cur == parent->_left)
{
cur = parent;
parent = parent->_parent;
}
_node = parent;
}
return *this;
}
//重载!=运算符
bool operator!=(const Self& s)
{
return _node != s._node;
}
//重载==运算符
bool operator == (const Self & s)
{
return _node == s._node;
}
};
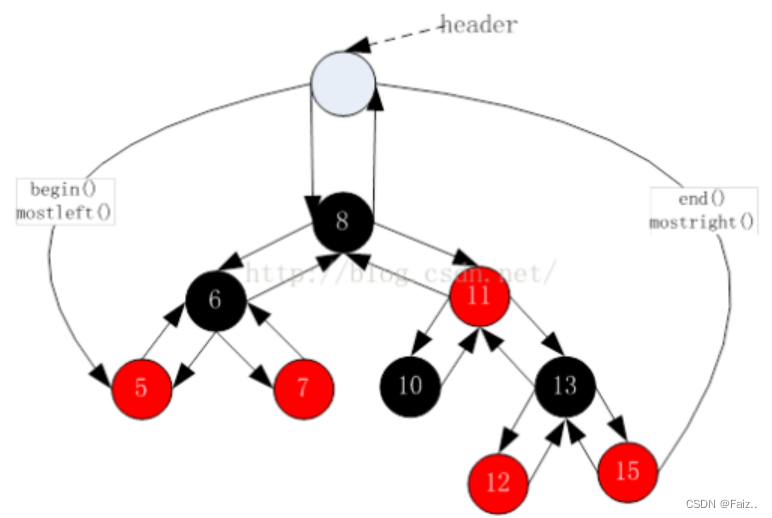
4、在红黑树中封装迭代器
在红黑树中,起始节点begin()是最左节点
结束位置是空位置节点
本文采用上面的实现方法。
为了实现左闭右开,STL库采用的是end指向哨兵位头结点,最左边节点也和头相连。
template<class K,class T,class KeyofT>
class RBTree
{
public:
typedef __RBTreeIterator<T> iterator;
typedef RBTreeNode<T> Node;
KeyofT kot;
iterator begin()
{
Node* subleft = _root;
while (subleft && subleft->_left)
{
subleft = subleft->_left;
}
return iterator(subleft);
}
iterator end()
{
return iterator(nullptr);
}
private:
Node* _root=nullptr;
};5、map和set对迭代器的封装
1、map
typedef typename RBTree<K, pair<const K, V>, KeyofMap>::iterator iterator;
这里要使用typename
当在模板中使用嵌套类型或依赖于模板参数的类型推导时,需要使用
typename关键字来告诉编译器这是一个类型而不是一个变量。这通常出现在模板中使用嵌套类型或依赖于模板参数的类型推导时。
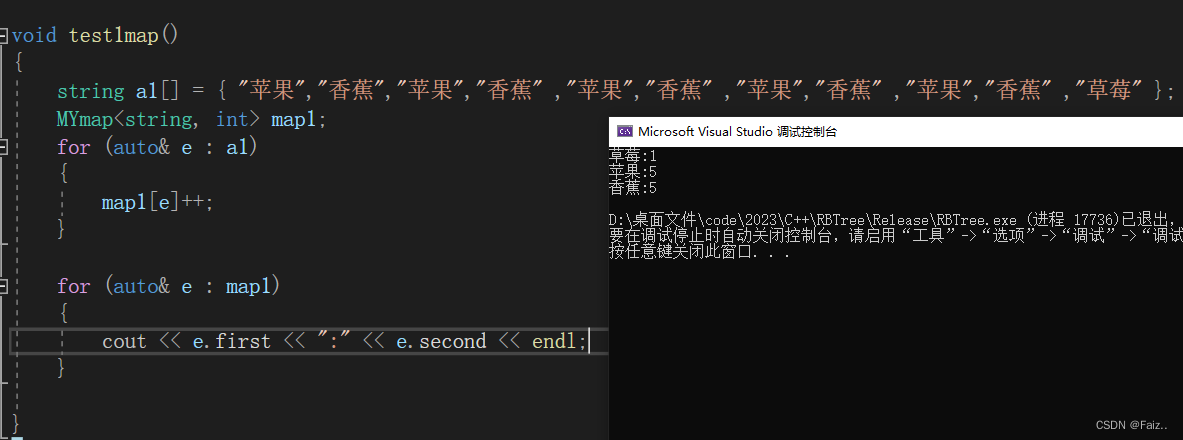
map中[]的重载
V& operator[](const K& key)
{
pair<iterator, bool> ret = Insert(make_pair(key, V()));
return ret.first->second;
}map中的[]可以实现查找,修改,插入三个功能。
当使用
[]操作符访问map中的元素时,如果该键已经存在,则返回对应的值;
如果该键不存在,则会插入一个新的键值对,并返回一个默认构造的值。
在红黑树中也要对insert进行修改来匹配

我们来测试一下修改(更改value值):
#pragma once
#include"RBTree.h"
template<class K,class V>
class MYmap
{
struct KeyofMap
{
const K& operator ()(const pair<K,V> &kv)
{
return kv.first;
}
};
public:
typedef typename RBTree<K, pair<const K, V>, KeyofMap>::iterator iterator;
iterator begin()
{
return _t.begin();
}
iterator end()
{
return _t.end();
}
V& operator[](const K& key)
{
pair<iterator, bool> ret = Insert(make_pair(key, V()));
return ret.first->second;
}
pair<iterator,bool> Insert(const pair<const K, V>& kv)
{
return _t.Insert(kv);
}
private:
RBTree<K, pair<const K, V>, KeyofMap> _t;
};
2、set
#pragma once
#include"RBTree.h"
template<class T>
class Myset
{
struct SetKeyofvalue
{
const T& operator()(const T& key)
{
return key;
}
};
public:
typedef typename RBTree<T,const T, SetKeyofvalue>::iterator iterator;
iterator begin()
{
return _t.begin();
}
iterator end()
{
return _t.end();
}
pair<iterator,bool> Insert(const T& key)
{
return _t.Insert(key);
}
private:
RBTree<T, const T, SetKeyofvalue> _t;
};
在C++的std::map和std::set容器中,元素的键值是不可更改的,这是因为这两个容器是基于红黑树实现的,红黑树的性质要求元素的键值在插入后不能被修改,否则会破坏红黑树的结构。
所以在实现时,map使用了
RBTree<K, pair<const K, V>, KeyofMap> _t;
set使用了
RBTree<T, const T, SetKeyofvalue> _t;
来保证key值不会被修改。
下面给出红黑树完整的插入函数:
pair<iterator,bool> Insert(const T& data)
{
if (_root == nullptr)
{
_root = new Node(data, BLACK);
Node* newnode = _root;
//根的双亲为头结点
return make_pair(iterator(newnode), true);
}
Node* parent = nullptr;
Node* cur = _root;
while (cur)
{
if (kot(cur->_data) < kot(data))
{
parent = cur;
cur = cur->_right;
}
else if(kot(cur->_data) > kot(data))
{
parent = cur;
cur = cur->_left;
}
else
{
return make_pair(cur,false);
}
}
cur = new Node(data, RED);
Node* newnode = cur;
if (kot(cur->_data) < kot(parent->_data))
{
parent->_left = cur;
}
else
{
parent->_right = cur;
}
cur->_parent = parent;
while (parent && parent->_color == RED)
{
Node* grandparent = parent->_parent;
if (parent == grandparent->_left)
{
Node* uncle = grandparent->_right;
if (uncle && uncle->_color == RED)
{
grandparent->_color = RED;
parent->_color = BLACK;
uncle->_color = BLACK;
cur = grandparent;
parent = cur->_parent;
}
else
{
if (cur == parent->_left)
{
RotateR(grandparent);
parent->_color = BLACK;
grandparent->_color = RED;
}
else
{
RotateL(parent);
RotateR(grandparent);
cur->_color = BLACK;
grandparent->_color = RED;
}
break;
}
}
else
{
Node* uncle = grandparent->_left;
if (uncle && uncle->_color == RED)
{
grandparent->_color = RED;
parent->_color = BLACK;
uncle->_color = BLACK;
cur = grandparent;
parent = cur->_parent;
}
else
{
if (cur == parent->_right)
{
RotateL(grandparent);
parent->_color = BLACK;
grandparent->_color = RED;
}
else
{
RotateR(parent);
RotateL(grandparent);
cur->_color = BLACK;
grandparent->_color = RED;
}
break;
}
}
}
_root->_color = BLACK;
return make_pair(iterator(newnode),true);
}
通过封装实现Map和Set,可以使用红黑树的特性来实现键值对的存储和查找,同时保持数据结构的平衡性和高效性。以上就是用红黑树封装实现map和set,当然这只是简单实现,对于更好地理解和使用这个容器比较有帮助。















 215
215











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









