







00. 目录
01. 激光跟踪仪简介
Omnitrac2激光跟踪仪,基于API自主研发的无线精密测量科技平台,是大尺寸测量的理想工具,代表了世界尖端的激光跟踪测量技术。 Omnitrac2激光跟踪仪突破了传统跟踪仪的设计理念,内部集成了控制箱、温度补偿系统、倾角传感器及电池。其紧凑的设计充分满足在有限的测量空间内完成高质量测量任务。
API是激光跟踪仪的发明者,并拥有激光跟踪仪技术的最初专利。1989年,基于API的激光跟踪仪技术,世界上第一台商业激光跟踪仪诞生了。如今,成百上千台的API激光跟踪仪已经源源不断的销往世界各地。
此外Omnitrac2激光跟踪仪继承了内置WiFi无线数据传输系统,这极大的简化了设备安装时的程序,消除了通常设备安装时所受的电线/连接线带来的困扰。
Omnitrac2激光跟踪仪采用绝对激光测距系统,在高速、便捷中保障测量精度。更支持快速断光续接,提升测量效率。其靶球自动锁定功能,在断光的情况下,使激光跟踪仪会迅速寻找并锁定操作靶球,极大方便了测量者的使用。

02. 激光跟踪仪特点
-极致便携
-无线数据传输
-超大测量范围
-电池自动锁定
-集成环境误差补偿系统
-启动迅速无需预热
-内置水平仪
-可侧向或倒置安装
-狭窄空间可用
-安装简单使用简便
-支持多种型号靶标
-可兼容无线隐藏点侧头
【极致便携】
整机重量小于11千克,无需控制箱,OT2激光跟踪仪可以以任何姿态安装至您所需要的位置。且整机可轻松置入随身便携箱,携带方便。
【内置电池供电系统】
无需AC适配器的情况下,OT2激光跟踪仪依靠其内置电池供电系统仍可正常工作5个小时,而使用外置电池则更可使电池工作时间加倍。
【无与伦比的紧凑设计】
OT2激光跟踪仪突破了传统跟踪仪的设计理念,内部集成了控制箱、温度补偿系统、倾角传感器及电池。其紧凑的设计充分满足在有限的测量空间内完成高质量测量任务。
【虚拟水平】
OT2集成了内置水平仪,拥有一键调平功能的OT2激光跟踪仪可节省大量准备工作时间,为有效的测量提供保障。
【内置WiFi无线传输】
OT2集成了内置WiFi无线数据传输系统,这极大的简化了设备安装时的程序,消除了通常设备安装时所受的电线/连接线带来的困扰。
【绝对激光测距系统(ADM)】
OT2激光跟踪仪采用绝对激光测距系统,在告诉、便捷中保障测量精度,更支持快速断光续接,提升测量效率。
【靶球自动锁定功能(Autolock)】
OT激光跟踪仪具备靶球自动锁定功能,在断光的情况下,激光跟踪仪会迅速自动寻找并锁定操作靶球,极大方便了测量者的使用。
【环境误差补偿】
OT2激光跟踪仪集成了气象站功能,能在各类温湿度的测量环境下保障测量的准确与精密。工作温度可从-10℃ 至45℃。
【服务与支持】
API公司在全球各地拥有代表处,无论您身处何处,API公司卓越的服务队伍就在您身边,随时待命为您提供服务与支持。
【完全无线精密测量系统】
Omnitrac2无线激光跟踪仪可与同样基于API无线精密测量科技平台的vProbe无线智能测头相互完美兼容,从而组成无线精密测量系统。真正无需任何电缆、连接线,全无线信号传输、电池供电系统,造就极致便捷。 vProbe无线智能测头小巧轻便、符合人体工程学设计,手握贴合:触发开关设计合理,可便于操作者发布测量指令;双探针设计可轻松测到处于任何位置的待测点;且测针切换系统按钮位置合理,便于在测量过程中及时切换。
只需要Omnitrac2无线激光跟踪仪的主机再配以笔记本电脑即可组成Omnitrac2无线激光跟踪仪测量系统,无需任何形式的有线连接,Omnitrac2可进行无线连接操作以及具备电池供电功能。其他配件还包括:1个设备三脚架(或底座)、靶球(SMR)、工具箱及测量软件包。API公司还可以为用户提供各种软件接口和底层软件,以方便用户自行开发。
03. 激光跟踪仪应用场景
来自全球各地的API用户已将Omnitrac2激光跟踪仪及附件运用于其生产中的各个环节。
-
工装家具的检测
-
大型装配工程的测量与定位
-
装配校准
-
零部件检测
-
远距离测量
-
CMM校准
-
机器人校准
-
逆向工程
-
过程中检测
-
工具与模具的检测
-
雷达天线定位
-
大型机床的空间误差补偿
-
以及更多


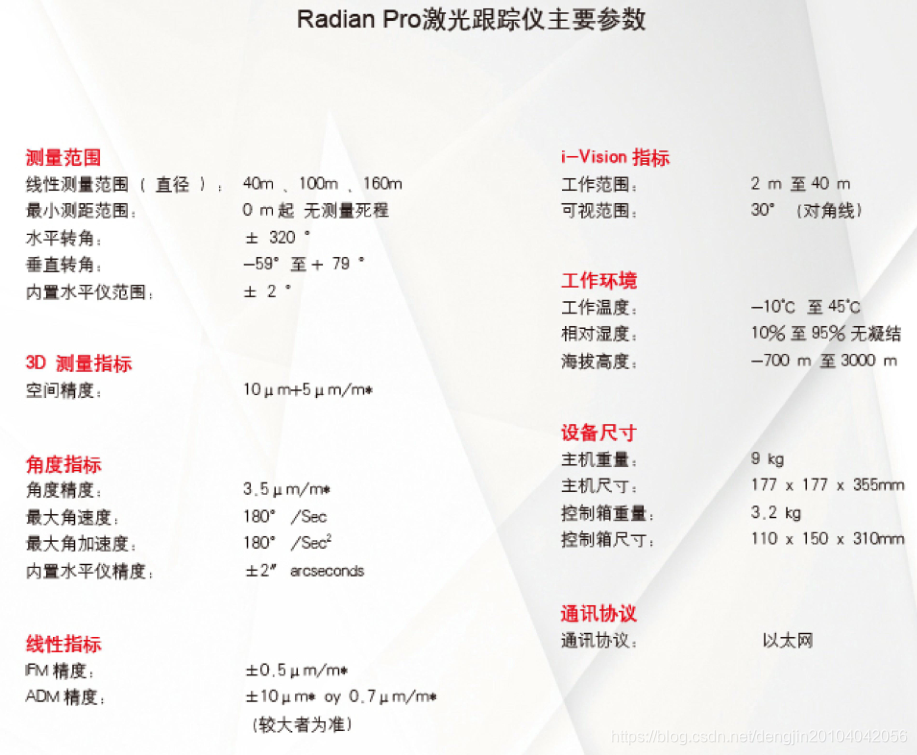
04. 激光跟踪仪主要参数
05. 附录
5.1 国际金属加工网:https://www.mmsonline.com.cn/
5.2 API中国官网:http://apisensor.com.cn/


















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











