







GIT代码地址:https://gitee.com/dhxiaotu/esp32-s3-cam4-foots
DIY机器人套件地址:
https://shop64022682.taobao.com/
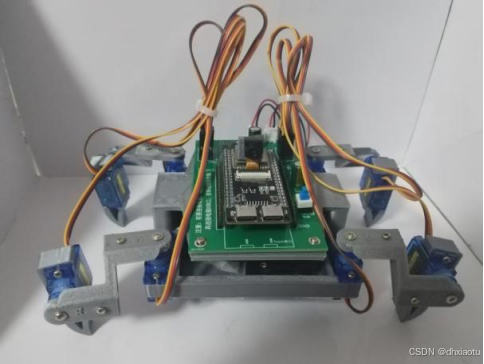
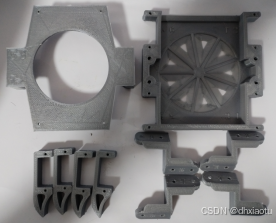
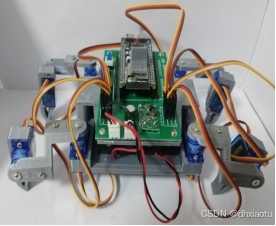
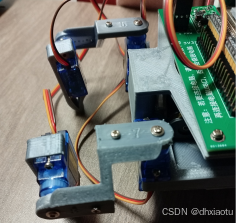
本WIFI四足机器人项目为开源项目,可从gitee下载源代码,同时设计了配套的电路板、3D打印件。四足机器人采用8个SG90舵机作为驱动,控制4个髋关节和四个足的运动。可通过手机浏览器控制机器人的前进、后退、转圈、蹲起、跳舞等。

代码下载
GIT代码地址:https://gitee.com/dhxiaotu/esp32-s3-cam4-foots

代码说明
安装开发环境Arduino IDE,
打开工程文件目录,双击打开工程文件“ESP32S3Cam4Foots.ino”
依次点击菜单栏“文件”->“首选项”打开设置页面,配置项目文件夹路径为当前源代码文件夹。
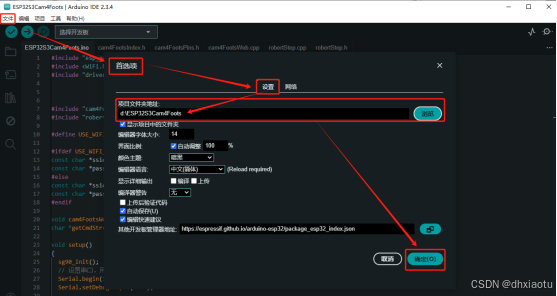
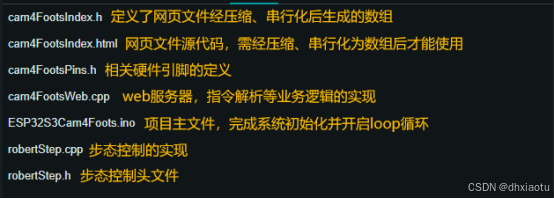
设置完成后,点击“项目文件夹”图标,则展示项目包含的文件。

代码编译与烧录
将核心板从开发板上取下,通过USB下载线连接核心板和电脑(部分电脑需安装串口驱动)
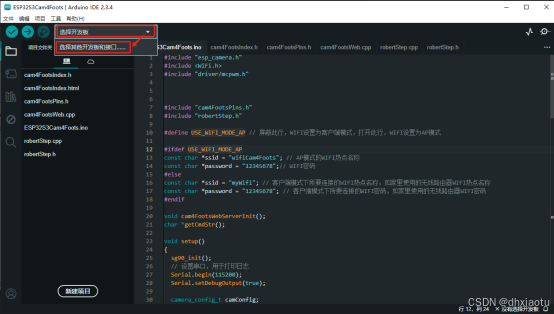
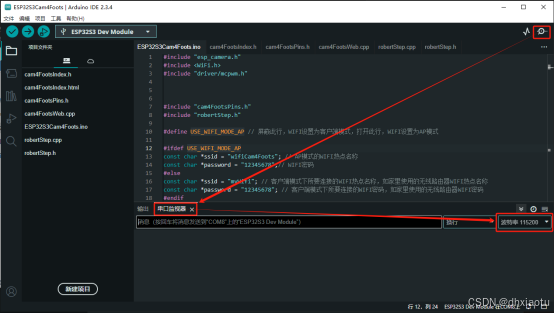
点击Arduino IDE中的开发板配置框,配置开发板和串口
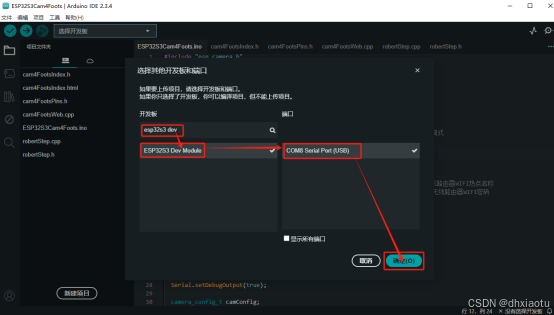
在左侧选择框中键入想要查找的开发板名称,下方便显示符合条件的开发板名称,点击选取ESP32S3 DEV Module,然后在右侧串口选择框中点击选取所连接的串口。
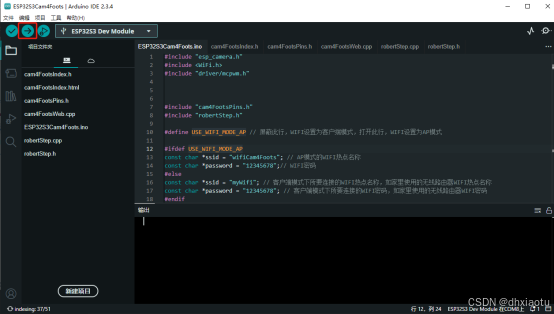
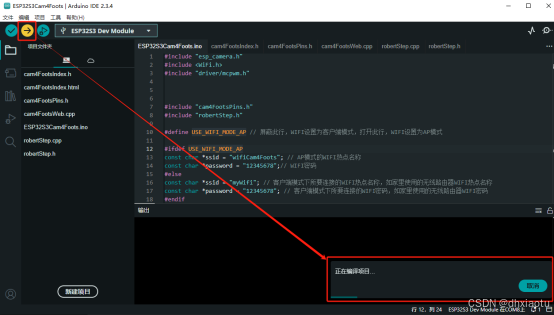
点击“上传”按钮,编译代码,并把代码烧录到核心板中。
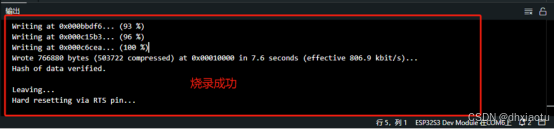
点击界面右上方按钮打开“串口监视器”,并设置串口的波特率为115200
按一下核心板上的“RST”按钮,重启核心板,串口监视器中便会打印出相应的运行信息。

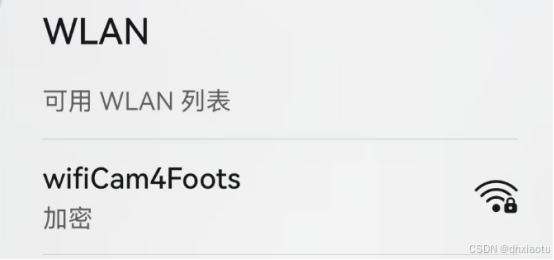
打开手机或电脑WIFI,搜索WIFI热点,连接名为“wifiCam4Foots”的热点,密码为12345678
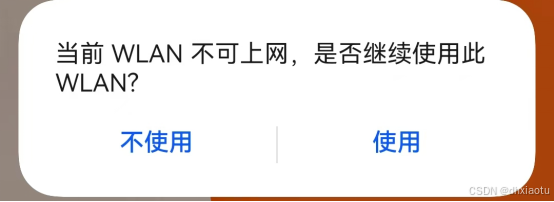
如下图所示,若弹出类似提示,请选择继续使用此WLAN,否则无法连接成功。
在浏览器中输入核心板的网址“192.168.0.1”,登录核心板网页


登录成功后,拔下核心板与电脑连接的USB数据线,将核心板装到四足机器人上。
通电,重新连接四足机器人热点,就可以通过网页端界面控制机器人行进了。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









