






如何将一个任意正方形变换为任意形状的四边形(不知道是否包含凹的啊,这个先不考虑)
仿射变换肯定不行的了,它保持了平行性,即原两条线平行,变换之后还平行
投影变换就可以,因为它仅仅保持了共线性,即只保证一条直线上的点变换之后仍然在一条直线上(参见Multiple View Geometry in computer vision P33)
下面用程序说明一下,具体参见:http://alumni.media.mit.edu/~cwren/interpolator/
先把目标点和对应的点给出来
%matplotlib inline
import numpy as np
import matplotlib.pyplot as plt
oriD=[(0,0),(0,1),(1,1),(1,0)]
dstD=[(2,1),(3,3),(4,2),(3,0)]
ori=np.array(oriD)
dst=np.array(dstD)
plt.scatter(ori[:,0],ori[:,1],s=30,c=['r','g','b','c'])
plt.scatter(dst[:,0],dst[:,1],s=120,c=['r','g','b','c'])大点代表变换后的,颜色对应
def getLeft(a,b):
t1=(a[0],a[1],1,0,0,0,-1*b[0]*a[0],-1*b[0]*a[1])
t2=(0,0,0,a[0],a[1],1,-1*b[1]*a[0],-1*b[1]*a[1])
dotLeft=t1+t2
return dotLeft
def getWright(b):
return (b[0],b[1])
def getMatrix(x,y):
A=np.array([getLeft(a,b) for (a,b) in zip(x,y)]).reshape((8,-1))
B=np.vstack([getWright(b) for b in y]).flatten()
m=np.linalg.solve(A,B)
m=np.array(list(m)+[1]).reshape((3,3))
return m
变换过去:
m=getMatrix(ori,dst)
[m.dot(np.array(list(x)+[1])) for x in oriD]
[array([ 2., 1., 1.]),
array([ 3., 3., 1.]),
array([ 4., 2., 1.]),
array([ 3., 0., 1.])]
逆变换也能够变回来:
m_inv=np.linalg.pinv(m)
[m_inv.dot(np.array(list(x)+[1])) for x in dstD]
[array([ 3.33066907e-16, 2.22044605e-16, 1.00000000e+00]),
array([ 5.55111512e-16, 1.00000000e+00, 1.00000000e+00]),
array([ 1., 1., 1.]),
array([ 1.00000000e+00, 2.22044605e-16, 1.00000000e+00])]注:投影变换应使用齐次坐标来理解,变换矩阵又叫齐次矩阵,对于齐次变换,由于矩阵元素的比才是重要的,因此齐次矩阵其实只有8个自由度,计算的时候,将齐次矩阵的[3,3]元素,即角落里那个设为1,源和目标坐标的齐次坐标也设为1
行列式和线性变换
本文源自:http://mathinsight.org/determinant_linear_transformation
T:Rn→Rm 是一个从n维到m维空间的映射,对应一个m*n的矩阵
One-dimensional linear transformations
T(x)=ax
a 看作a 1×1 matrix,行列式就是a
一维变换的行列式对应‘长度’
例如T(x)=3x,将长度拉长为原来的3倍,方向不变
还有 T(x)=−1/2,行列式为负,将朝向改变,实际是就是‘镜像’了
Two-dimensional linear transformations
T:R2→R2
\({T}(x,y) = (ax+by,cx+dy) = \left[\begin{array}{cc}a &b\\ c &d\end{array}\right]\left[\begin{array}{c}x\\y\end{array}\right],\)
更简洁一点
\(\{T}(\vc{x}) = A\vc{x},\)
We will view T as mapping objects from the xy-plane onto an x′y′-plane: (x′,y′)=T(x,y).
\(\vc{T}(x,y) = \left[\begin{array}{cc}-2 &0\\ 0 &-2\end{array}\right]\left[\begin{array}{c}x\\y\end{array}\right].\)
行列式为4,不改变朝向,即顺时针旋转过来,各个颜色还能对应上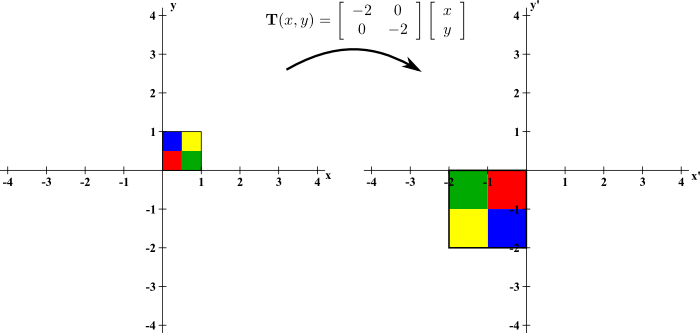
下面这个就不同了,顺时针旋转过来,各个颜色对应不上了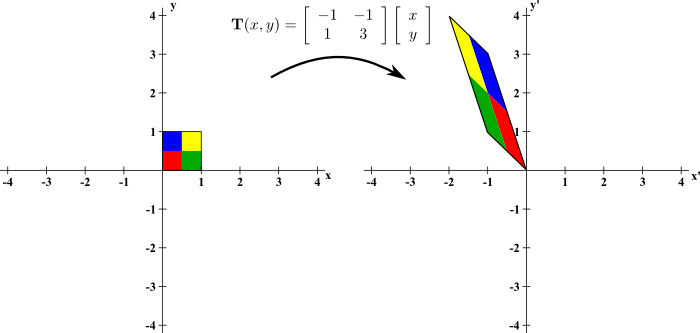
Three-dimensional linear transformations
T:R3→R3改变的是体积和朝向















 302
302











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









