



 本文详细介绍了GNSS定位技术,包括伪距和载波观测值的计算,单点定位、相对定位(RTD和RTK)、精密单点定位(PPP)的区别,以及各种误差源的处理方法。特别强调了RTK技术和PPP技术的高精度特性及技术对比。
本文详细介绍了GNSS定位技术,包括伪距和载波观测值的计算,单点定位、相对定位(RTD和RTK)、精密单点定位(PPP)的区别,以及各种误差源的处理方法。特别强调了RTK技术和PPP技术的高精度特性及技术对比。
此讲义课件共21讲,为我和别人合作的《从零掌握GNSS、RTK定位》课程讲义,详情关注我个人公众号 GNSS和自动驾驶,公众号有其他的资源以及一些开源代码。另外csdn公式显示太差了,从word复制过来显示异常,公众号上显示正常一些。
7.1 观测值公式
7.1.1 伪距观测值
![]()
其中
![]() 为卫星
为卫星![]() 到接收机
到接收机![]() 的伪距观测值
的伪距观测值
![]() 为卫星
为卫星![]() 到接收机
到接收机![]() 的真实距离
的真实距离
![]() 为卫星
为卫星![]() 钟误差
钟误差
![]() 为接收机
为接收机![]() 钟误差
钟误差
![]() 为卫星
为卫星![]() 到接收机
到接收机![]() 的电离层延迟
的电离层延迟
![]() 为卫星
为卫星![]() 到接收机
到接收机![]() 的对流层延迟
的对流层延迟
![]() 为伪距观测值噪声
为伪距观测值噪声
单位为米
7.1.2 载波观测值

其中
![]() 为卫星
为卫星![]() 到接收机
到接收机![]() 的伪距观测值
的伪距观测值
![]() 为波长
为波长
![]() 为整周模糊度
为整周模糊度
![]() 为载波观测噪声
为载波观测噪声
单位为米
7.2 定位技术简介
参考视频:
卫星定位导航,要搜到4颗以上的卫星才行?_哔哩哔哩_bilibili
7.2.1 单点定位技术
单点定位技术(Single Point Positioning, SPP),是指仅使用伪距观测值,不使用其他的辅助信息获得ECEF框架下绝对定位技术。
单点定位技术使用广播星历的轨钟进行定位,考虑到轨钟的米级精度,所以对于<1米的误差,基本不考虑。同时因为仅使用伪距,所以和载波相关的误差也不需要考虑。
对于单频用户,一般使用广播星历播发的电离层模型和tgd产品,进行改正。对流层误差同样使用经验模型进行改正,对于各项潮汐引起的误差以及天线相位中心偏差等误差,均可不做考虑。
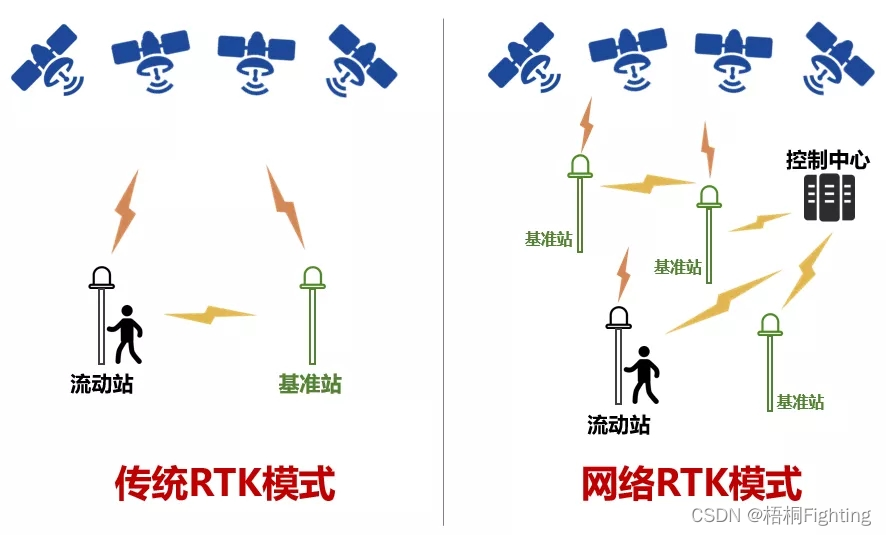
7.2.2 相对定位技术
参考视频:
相对定位技术分两种,第一种是仅伪距参与定位,称为 RTD技术(Real Time Differential),第二种是在第一种的基础上增加了载波观测值的使用,称为RTK技术(Real Time kinematic);
以上两种技术都是实时的定位技术,可以得到cm-dm的实时定位精度。
相对定位技术中,还有一种和RTK相似的技术,但它需要经过事后处理得到定位结果,称为PPK技术(Post Processed Kinematic),通过事后处理,可以进一步提升RTK的定位精度。
在一些场景中,比如地图采集/航测等,定位精度其实比实时性更重要,或者在一些场景中并不能接入电台或者互联网实时获得差分改正信息。
所谓差分改正信息,可以认为是,另外一个安装在已知点的接收机的卫星观测信息。我们需要一定的通讯手段,将差分信息发送到用户端,供定位算法引擎对同一个卫星的观测值组站间差分。
因为对于距离相对较近的两个站点,其轨道误差对两个站的影响基本相似,通过站间差分,可以消除轨道误差的影响。
同时,如果两个测站观测时刻相同,对同一个卫星的伪距或者载波组站间差分可直接消除卫星钟差的影响。
7.2.3 精密单点定位技术
精密单点定位技术(precise point positioning, PPP),和单点定位技术类似,可以使用单台接收机在全球任何位置获得高精度的ECEF框架下的绝对坐标。
为了获得高精度的定位结果,所有的厘米量级以上的误差均需要考虑。
需要使用高精度的轨钟产品,而不能使用广播星历中的低精度广播轨道;
使用无电离层组合,或者在状态参数中增加电离层误差的估计;
对天顶的对流层湿延迟进行估计;
使用模型对天线相位缠绕进行修正;
使用模型对卫星或者接收机的天线相位偏差进行修正;
使用模型对潮汐误差进行修正;
为了提高收敛速度和定位精度,需要使用phasebias产品,完成模糊度的固定,我们称之为PPPAR技术(PPP Ambiguity Resolution);
为了进一步提高收敛速度和定位精度,可以播发高精度的格网电离层产品和对流层产品,我们称之为PPPRTK技术(PPP Real Time Kinematic);
7.2.4 技术对比
| 轨钟误差 | 电离层 | 对流层 | 天线相位偏差 | 相对论效应 | 潮汐改正 | |
| SPP | 不考虑 | 模型 | 模型 | 无 | 模型 | 不考虑 |
| RTK | 站间单差 | 站间单差 | 站间单差 | 星间单差+站间单差 | 模型 | 站间单差 |
| PPP | 精密产品 | 无电离层组合/参数估计 | 模型+参数估计 | 模型 | 模型 | 模型 |


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









