







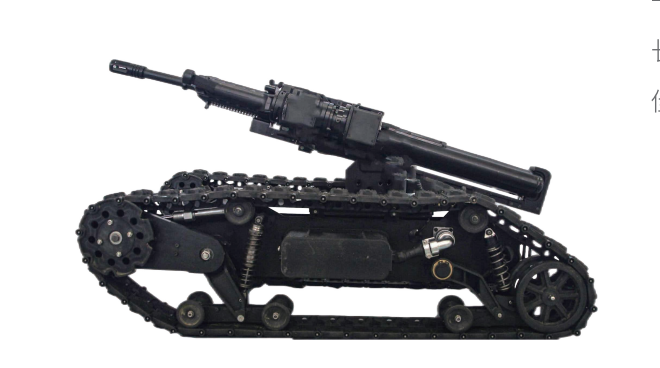
单兵可背负履带式全地形无人车是一种专为复杂环境和多样化任务设计的智能装备,具备出色的地面适应性、越野性能以及灵活的操控性。以下是对其技术的详细解析:
一、驱动技术
履带式驱动:采用履带式驱动技术,通过履带与地面的广泛接触,减小了车辆对地面的压强,提高了在沙地、雪地、泥泞等复杂地形中的通过能力。同时,履带式驱动还赋予了无人车较高的牵引力和稳定性,确保在坡道、崎岖山路等场景下也能保持良好的操控性。
动力系统:通常搭载高性能发动机或电动机作为动力源,提供充足的动力支持。动力系统经过优化设计,确保在保持高负载能力的同时,降低能耗和噪音,满足隐蔽作业的需求。
二、无人操控系统
远程操控:操作人员可以通过遥控器或控制终端对无人车进行实时操控,实现车辆的启动、停止、转向、加速等动作。远程操控系统具备良好的操作性和可靠性,确保操作人员能够准确控制无人车。
自主控制:无人车还具备自主控制功能,能够根据预设的任务和指令自主完成行驶、避障、作业等任务。自主控制系统通过集成先进的传感器和算法,实现对周围环境的感知和决策,提高了无人车的智能化水平。
三、感知与导航系统
传感器集成:无人车搭载了激光雷达、摄像头、超声波等多种传感器,实时获取周围环境的信息。这些传感器通过多传感器融合技术,实现环境的三维建模和障碍物识别,为导航系统提供准确的数据支持。
导航系统:导航系统根据传感器提供的信息,计算出无人车的当前位置、速度和姿态,并规划出最优的行驶路径。导航系统还具备实时调整能力,能够根据实时感知到的环境信息对行驶路径进行动态优化。
四、承重与越障能力
承重能力:单兵可背负履带式全地形无人车通常具备较大的承重能力,能够搭载多种设备或物资进行作业。其承重能力取决于无人车的结构设计、动力系统以及底盘强度等因素。
越障能力:无人车采用宽幅履带和高离地间隙设计,提高了在松软、泥泞地面和崎岖山路等复杂地形中的通过性。同时,其高扭矩输出的动力系统确保了无人车在恶劣地形下依然具备强大的爬坡和越障能力。
五、安全性能
紧急停车:无人车配备了紧急停车功能,确保在紧急情况下能够迅速停止车辆,保障人员和财产安全。
多重安全保护:无人车还具备过载保护、倾覆预警、电池管理系统(BMS)保护等多重安全保护措施,确保在使用过程中的安全性和可靠性。
六、应用领域
军事侦察与运输:在战场环境中执行侦察、监视、目标打击和物资运输等任务,减少人员伤亡风险。
灾难救援:在地震、洪水等自然灾害现场快速运输救援物资或人员,提高救援效率。
科研探索:支持极地、沙漠等极端环境下的科研考察活动,为科研人员提供可靠的交通和运输支持。
综上所述,单兵可背负履带式全地形无人车凭借其出色的地面适应性、越野性能、灵活的操控性以及广泛的应用领域,成为现代战争、灾难救援和科研探索等领域中不可或缺的重要装备。随着技术的不断发展和完善,其性能和应用范围还将得到进一步提升和拓展。



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











