







随着无人机技术的不断发展,FPV(First Person View,第一人称视角)穿越机在娱乐、航拍、搜索与救援等领域的应用日益广泛。FPV穿越机集群控制技术则是这一领域的热点研究方向,旨在通过协同控制多个穿越机实现更高效、更复杂的任务执行。本文将从通信技术、路径规划、碰撞避免、分布式控制、控制结构、任务分配和实时数据处理等方面对FPV穿越机集群控制技术进行详细解析。

穿越机集群, 适用于高速饱和攻击,一个遥控器可统一控制6-8架或单独控制任何一架,编队打击单个或多个,固定、移动目标、 荷载4kg,飞行距离7km。
1. 通信技术
FPV穿越机集群控制的核心是集群内部及集群与外部之间的实时通信。常用的通信技术包括Wi-Fi、蓝牙、ZigBee、LoRa等无线通信技术,以及新兴的5G、6G等移动通信技术。为了确保通信的实时性、稳定性和可靠性,通常采用多频段、多信道、多路径的通信策略,同时采用数据压缩、加密、校验等技术以提高通信效率和安全性。
2. 路径规划
路径规划是FPV穿越机集群控制中的重要环节,旨在为每个穿越机规划出从起点到终点的最优路径。路径规划算法需考虑环境因素(如地形、障碍物、风速等)、任务需求(如搜索范围、精度要求等)以及穿越机的性能参数(如飞行速度、机动性等)。常见的路径规划算法包括图搜索算法、启发式搜索算法、优化算法等。
3. 碰撞避免
在FPV穿越机集群中,由于多个穿越机在同一空间内同时运动,碰撞避免成为了一个关键问题。碰撞避免策略通常包括感知避障和预测避障两种方法。感知避障通过搭载传感器实时检测周围环境,根据检测结果进行避障操作;预测避障则通过预测集群内其他穿越机的运动轨迹,提前规划避障路径。
4. 分布式控制
分布式控制是FPV穿越机集群控制的重要策略之一,旨在实现集群内各个穿越机的自主协同。分布式控制结构通常包括中央控制器和多个分布式控制器,中央控制器负责全局规划和任务分配,分布式控制器则负责本地穿越机的控制和与其他穿越机的协同。
5. 控制结构
FPV穿越机集群的控制结构通常包括层次化控制和模块化控制两种形式。层次化控制将集群控制分解为多个层次,每个层次负责不同的控制任务;模块化控制则将集群控制划分为多个模块,每个模块负责特定的功能。这两种控制结构都有助于提高系统的可扩展性和可维护性。
6. 任务分配
任务分配是FPV穿越机集群控制中的另一个重要环节,旨在将复杂的全局任务分解为多个简单的子任务,并分配给集群内的各个穿越机执行。任务分配算法需考虑穿越机的性能参数、任务的需求以及集群的整体效率等因素。常见的任务分配算法包括基于规则的分配、基于优化的分配等。
7. 实时数据处理
FPV穿越机集群控制中涉及大量的实时数据处理任务,如传感器数据的采集与融合、状态估计与预测、控制指令的生成与发送等。实时数据处理技术需满足高速度、高精度和低延迟的要求,通常采用并行处理、流处理等技术手段来提高数据处理效率。
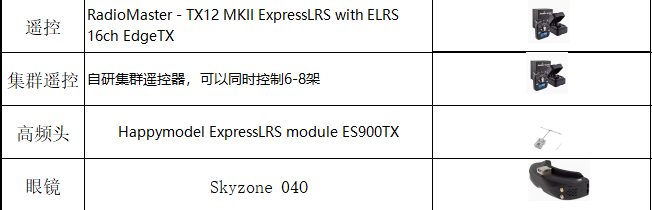
产品配件:
综上所述,FPV穿越机集群控制技术涉及多个方面,需要综合运用通信技术、路径规划、碰撞避免、分布式控制、控制结构、任务分配和实时数据处理等技术手段来实现高效、协同的集群控制。未来随着无人机技术的不断发展,FPV穿越机集群控制技术将有着更加广阔的应用前景。
其他联系微信: dh2541


















 1845
1845

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











