








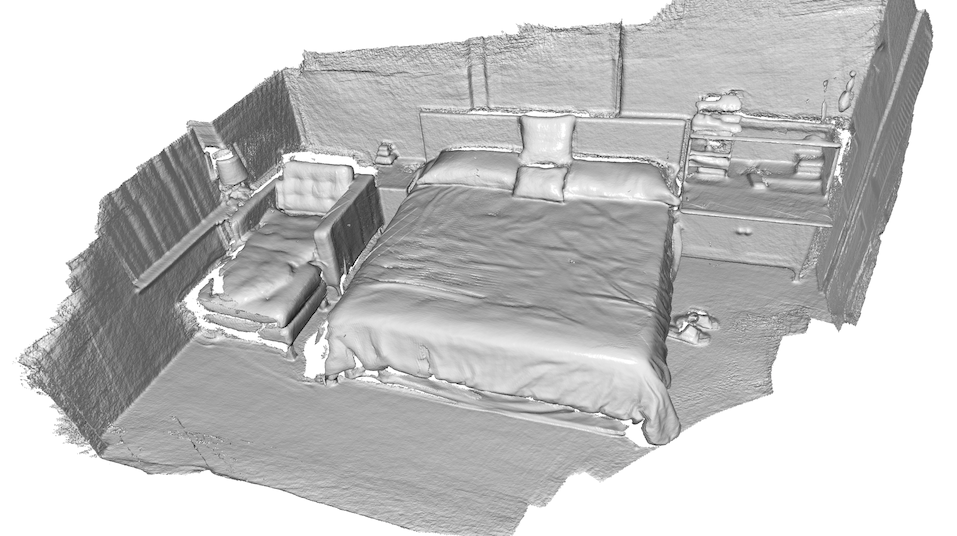
综合场景
Open3D能集成所有RGB-D图像到单一TSDF volume,压缩为一个mesh。
输入参数
if __name__ =="__main__":
parser =argparse.ArgumentParser(description=
"integrate the whole RGBDsequence using estimated camera pose")
parser.add_argument("path_dataset", help="path to thedataset")
parser.add_argument("-path_intrinsic",
help="path to the RGBD cameraintrinsic")
args = parser.parse_args()
if args.path_intrinsic:
intrinsic =read_pinhole_camera_intrinsic(args.path_intrinsic)
else:
intrinsic =PinholeCameraIntrinsic.prime_sense_default
scalable_integrate_rgb_frames(args.path_dataset, intrinsic)
上述脚本在python integrate_scene.py文件中,-path_intrinsic 指定json文件的路径,
集成RGBD frames
defscalable_integrate_rgb_frames(path_dataset, intrinsic):
[color_files, depth_files] =get_rgbd_file_lists(path_dataset)
n_files = len(color_files)
n_frames_per_fragment = 100
n_fragments = int(math.ceil(float(n_files)/ n_frames_per_fragment))
volume = ScalableTSDFVolume(voxel_length =3.0 / 512.0,
sdf_trunc = 0.04, with_color =True)
pose_graph_fragment = read_pose_graph(
path_dataset +template_global_posegraph_optimized)
for fragment_id inrange(len(pose_graph_fragment.nodes)):
pose_graph_rgbd =read_pose_graph(path_dataset +
template_fragment_posegraph_optimized % fragment_id)
for frame_id inrange(len(pose_graph_rgbd.nodes)):
frame_id_abs = fragment_id *n_frames_per_fragment + frame_id
print("Fragment %03d / %03d ::integrate rgbd frame %d (%d of %d)."
% (fragment_id,n_fragments-1, frame_id_abs, frame_id+1,
len(pose_graph_rgbd.nodes)))
color =read_image(color_files[frame_id_abs])
depth =read_image(depth_files[frame_id_abs])
rgbd =create_rgbd_image_from_color_and_depth(color, depth,
depth_trunc = 3.0,convert_rgb_to_intensity = False)
pose =np.dot(pose_graph_fragment.nodes[fragment_id].pose,
pose_graph_rgbd.nodes[frame_id].pose)
volume.integrate(rgbd, intrinsic,np.linalg.inv(pose))
mesh = volume.extract_triangle_mesh()
mesh.compute_vertex_normals()
draw_geometries([mesh])
mesh_name = path_dataset +template_global_mesh
write_triangle_mesh(mesh_name, mesh, False,True)


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









