






AGV全覆盖移动避障路径规划
扫地机器人路径规划
第一类算法 全覆盖智能算法
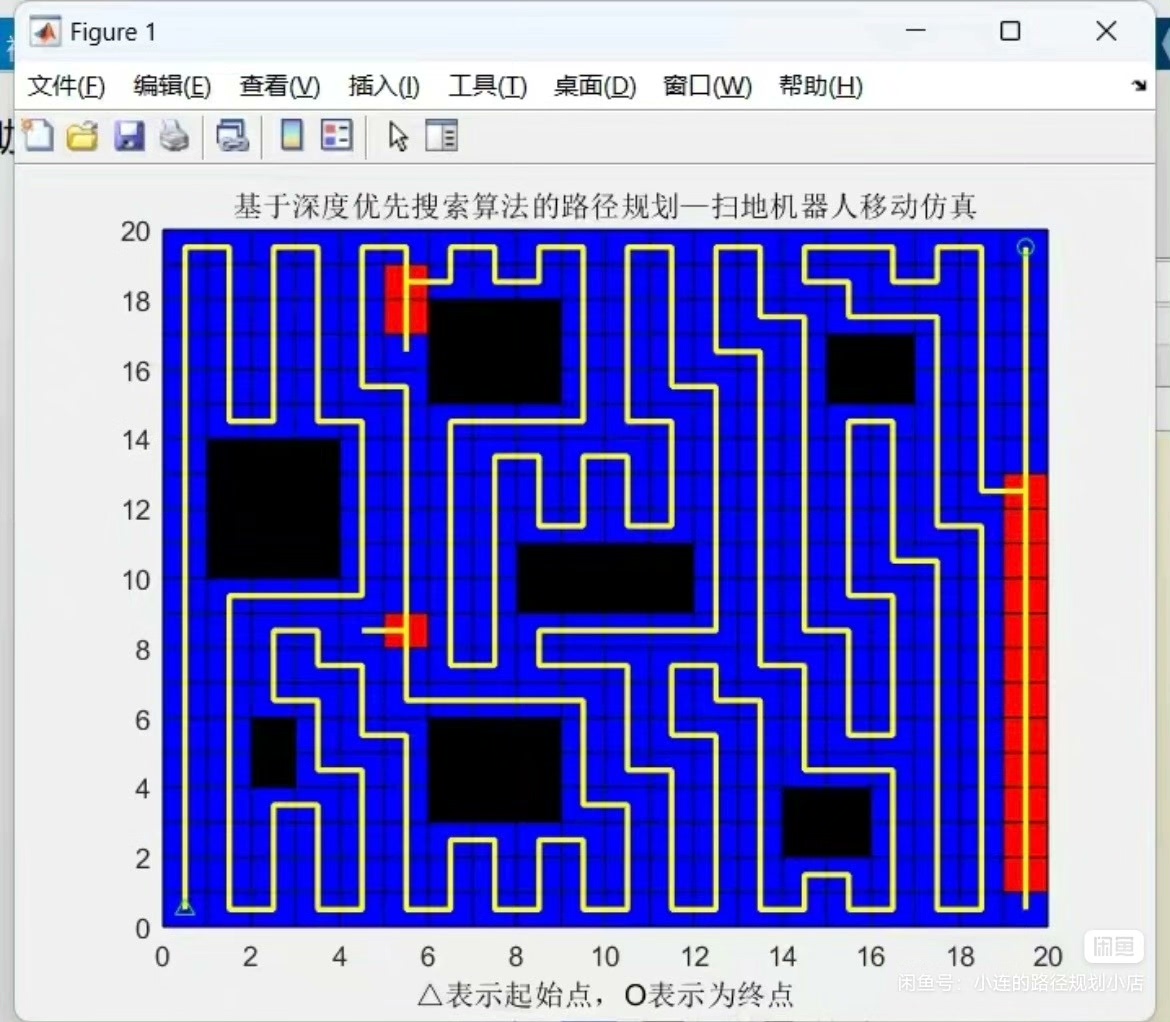
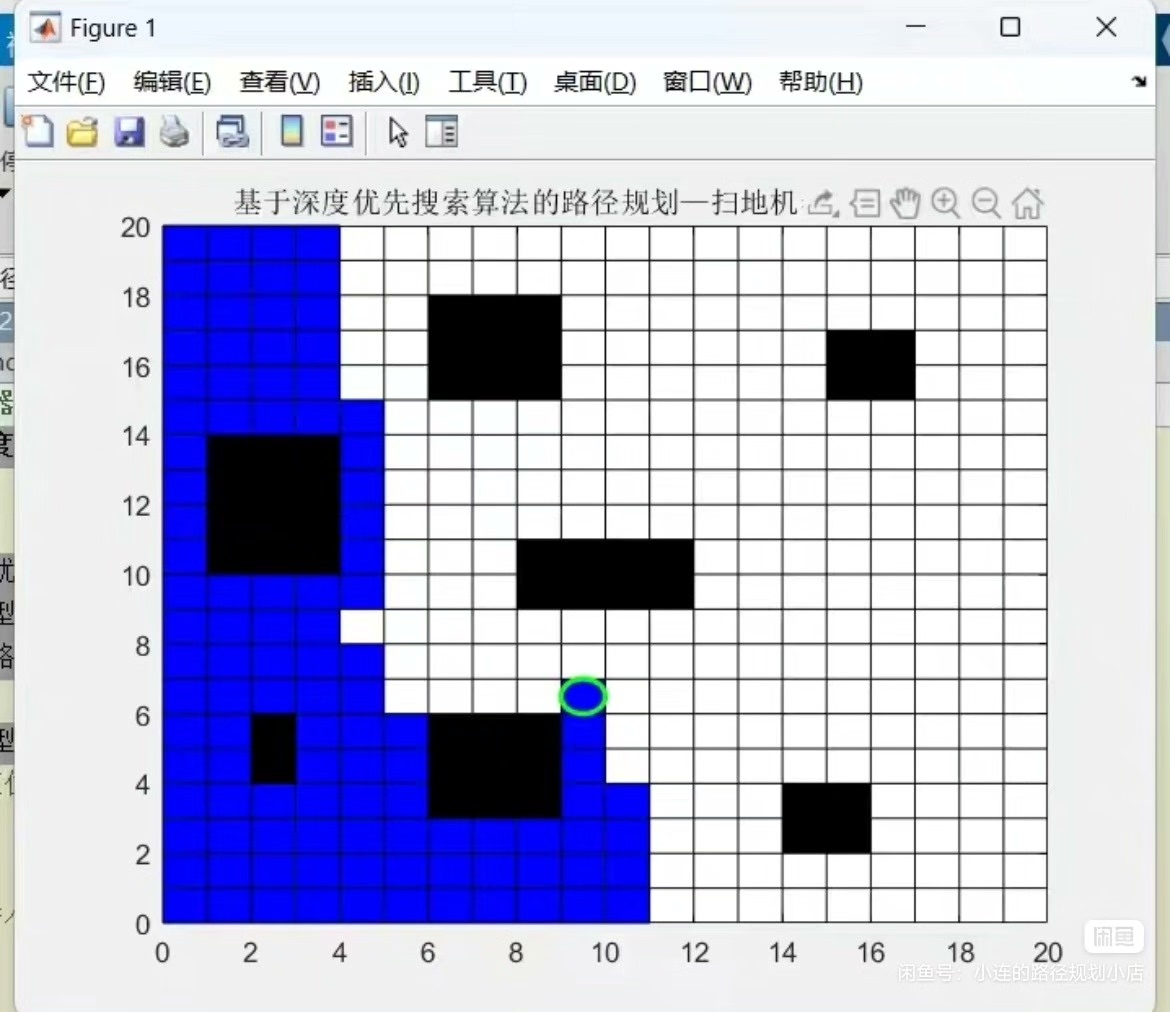
%% 基于深度优先搜索算法的路径规划—扫地机器人移动仿真
% 返回深度优先搜索实现全覆盖的运行次数
% 将栅格模型的每一个栅格看成一个点
% 实际中栅格模型是连续的,在计算机处理时看作离散的
% 将栅格模型抽象为标识矩阵,矩阵对应位置的标记表示栅格对应位置的状态
第二对比算法
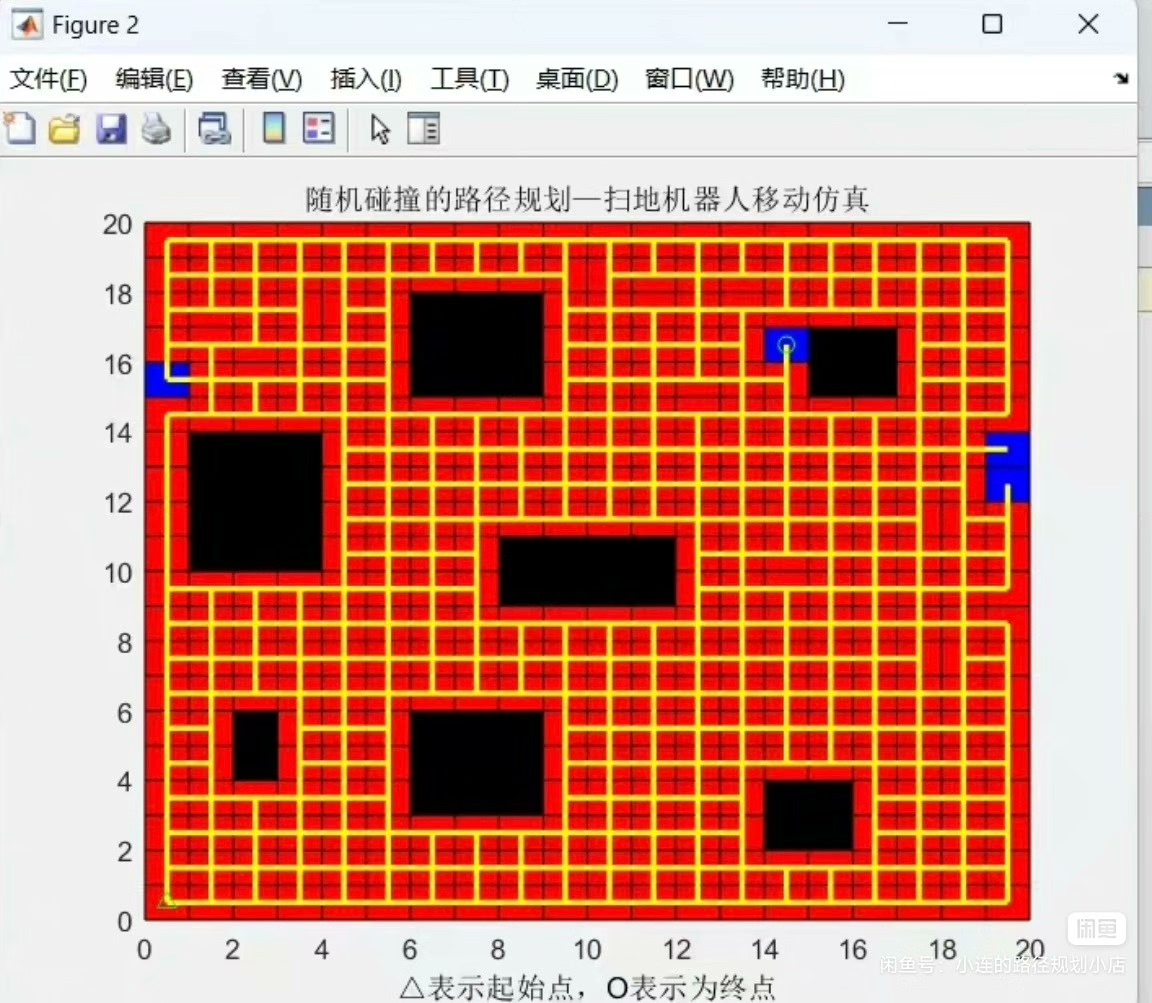
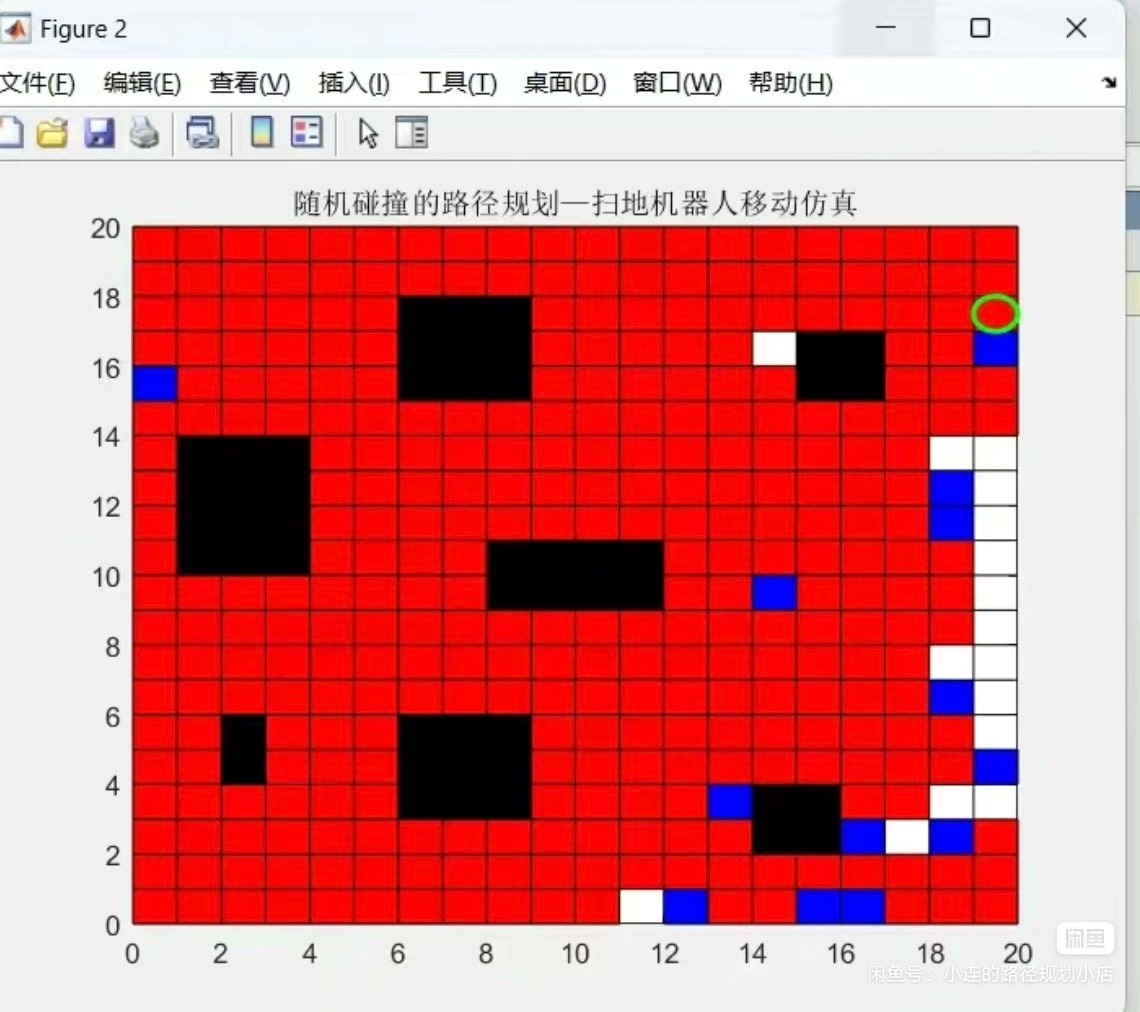
%% 随机碰撞的路径规划—扫地机器人移动仿真
% 返回深度优先搜索实现全覆盖的运行次数
% 将栅格模型的每一个栅格看成一个点
% 实际中栅格模型是连续的,在计算机处理时看作离散的
% 将栅格模型抽象为标识矩阵,矩阵对应位置的标记表示栅格对应位置的状态
ID:1669717159219195
小连的路径规划小店
AGV全覆盖移动避障路径规划是一项在扫地机器人领域有着重要应用的技术。本文将介绍两种不同的算法,分别是基于深度优先搜索算法的路径规划和随机碰撞的路径规划。
首先我们来介绍基于深度优先搜索算法的路径规划。该算法通过将栅格模型的每一个栅格看作一个点,并将栅格模型抽象为标识矩阵,矩阵对应位置的标记表示栅格对应位置的状态。在实际中,栅格模型是连续的,在计算机处理时则将其看作离散的。通过深度优先搜索算法,可以实现对整个栅格模型的全覆盖。
在基于深度优先搜索算法的路径规划中,关键是确定路径的遍历次数。通过对移动仿真的运行次数进行测算,可以评估算法的性能。该算法的优势在于能够实现全覆盖,即保证每一个栅格都能被扫地机器人访问到。
接下来我们将介绍第二种算法,即随机碰撞的路径规划。与基于深度优先搜索算法的路径规划不同,随机碰撞的路径规划并不追求全覆盖,而是通过随机选择路径进行移动。该算法同样将栅格模型抽象为标识矩阵,矩阵对应位置的标记表示栅格对应位置的状态。
随机碰撞的路径规划中,扫地机器人在移动时会随机选择一个方向进行移动,直到碰到障碍物或边界。然后,它会随机选择另一个方向继续移动。该算法的优势在于运行速度快,适用于一些简单的场景。
通过对比这两种算法,我们可以看到它们在路径规划中的不同特点。基于深度优先搜索算法的路径规划能够实现全覆盖,但需要较长的运行时间。而随机碰撞的路径规划虽然速度快,但无法实现全覆盖。
因此,在选择路径规划算法时,我们需要根据实际场景的需求来确定。如果需要对整个栅格模型进行全覆盖的话,可以选择基于深度优先搜索算法的路径规划。而如果只需要简单的移动路径,则可以选择随机碰撞的路径规划。
总的来说,AGV全覆盖移动避障路径规划在扫地机器人领域有着重要意义。通过选择不同的算法,我们可以实现不同的路径规划效果。在实际应用中,需要根据具体需求来选择合适的算法。
【相关代码,程序地址】:http://fansik.cn/717159219195.html

















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









