







 本文通过实物拆解展示了内部关键元器件的应用实例,包括2SC1623(NPN)、MMBT9015(PNP)、BCX56-16(NPN)等晶体管及MC14013B双D触发器,并配以100uF/16V电解电容,同时提供了详细的电路图分析。
本文通过实物拆解展示了内部关键元器件的应用实例,包括2SC1623(NPN)、MMBT9015(PNP)、BCX56-16(NPN)等晶体管及MC14013B双D触发器,并配以100uF/16V电解电容,同时提供了详细的电路图分析。
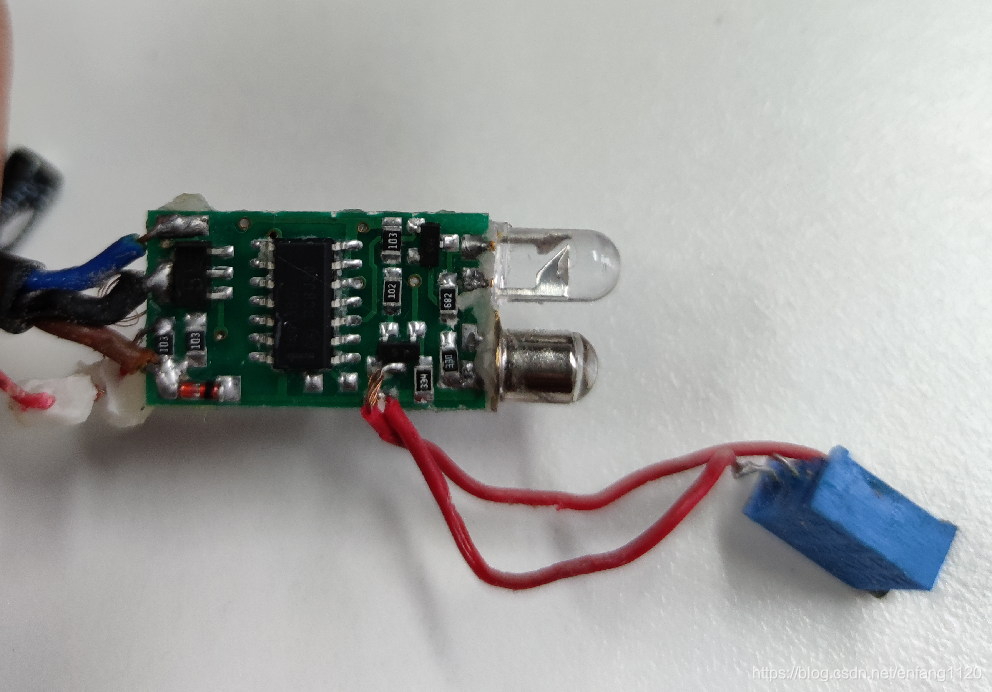
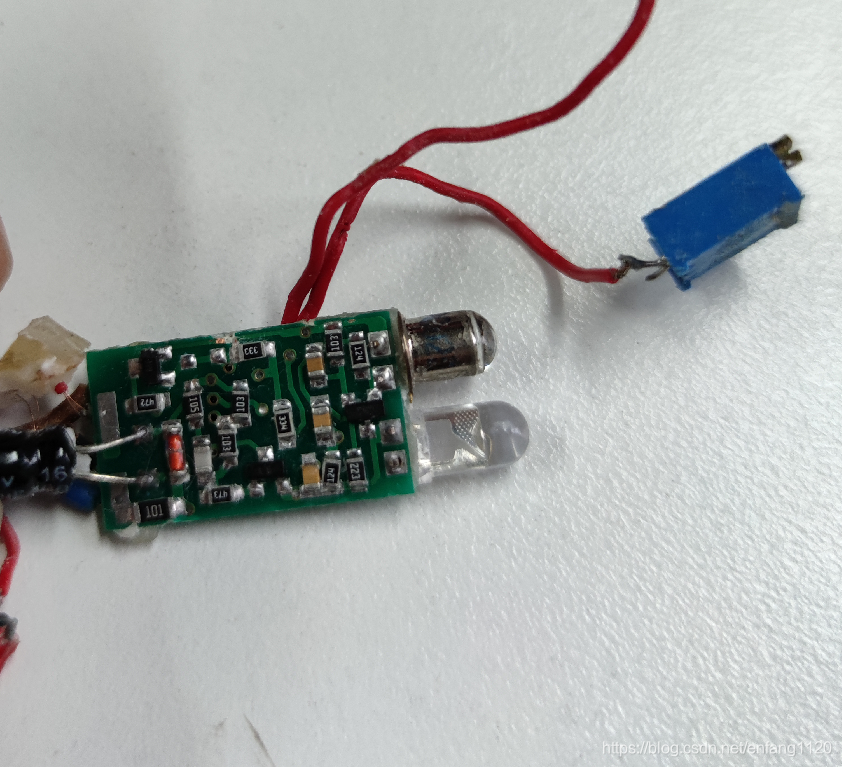
实物图片

1、拆解后的图片
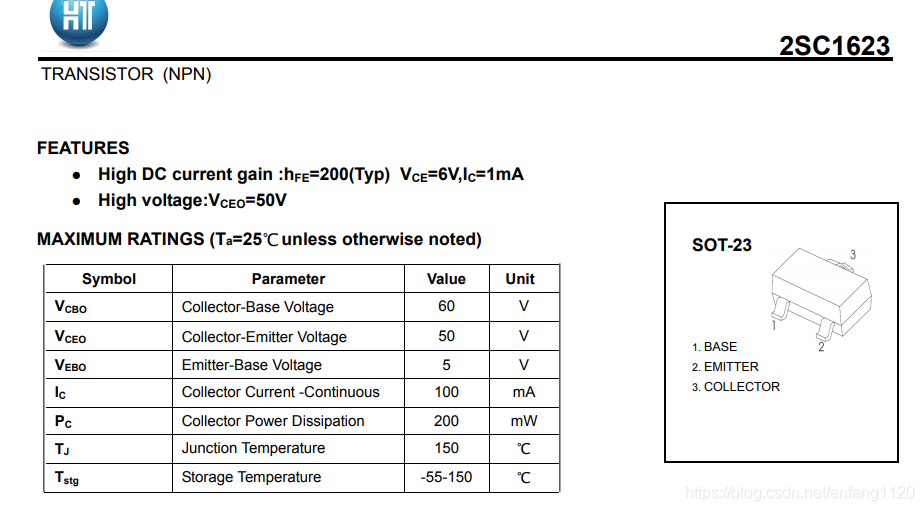
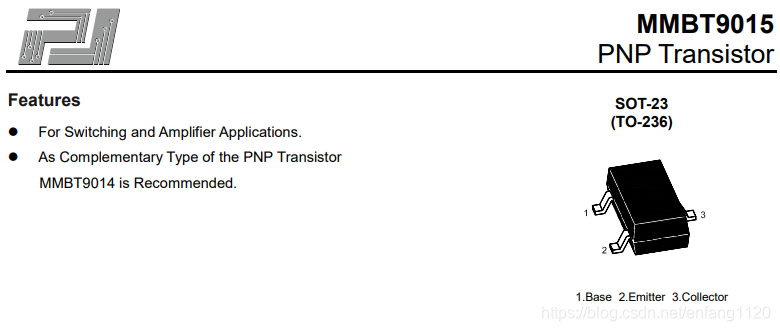
2、里面用到的关键元器件如下
L6-->2SC1623(NPN) SOT23:
M6-->MMBT9015(PNP) SOT23:
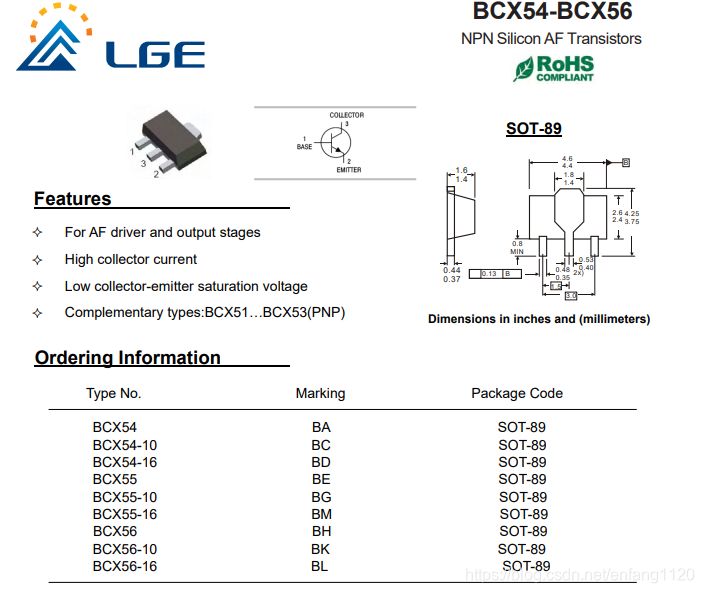
BL-->BCX56-16(NPN) SOT89:
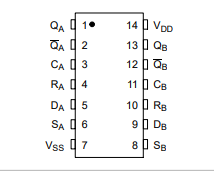
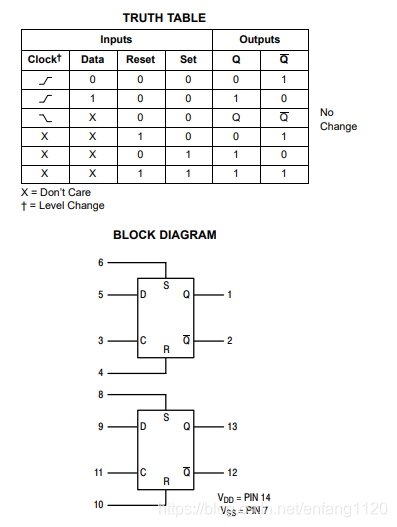
MC14013B 双D触发器:
100uF/16V 电解电容
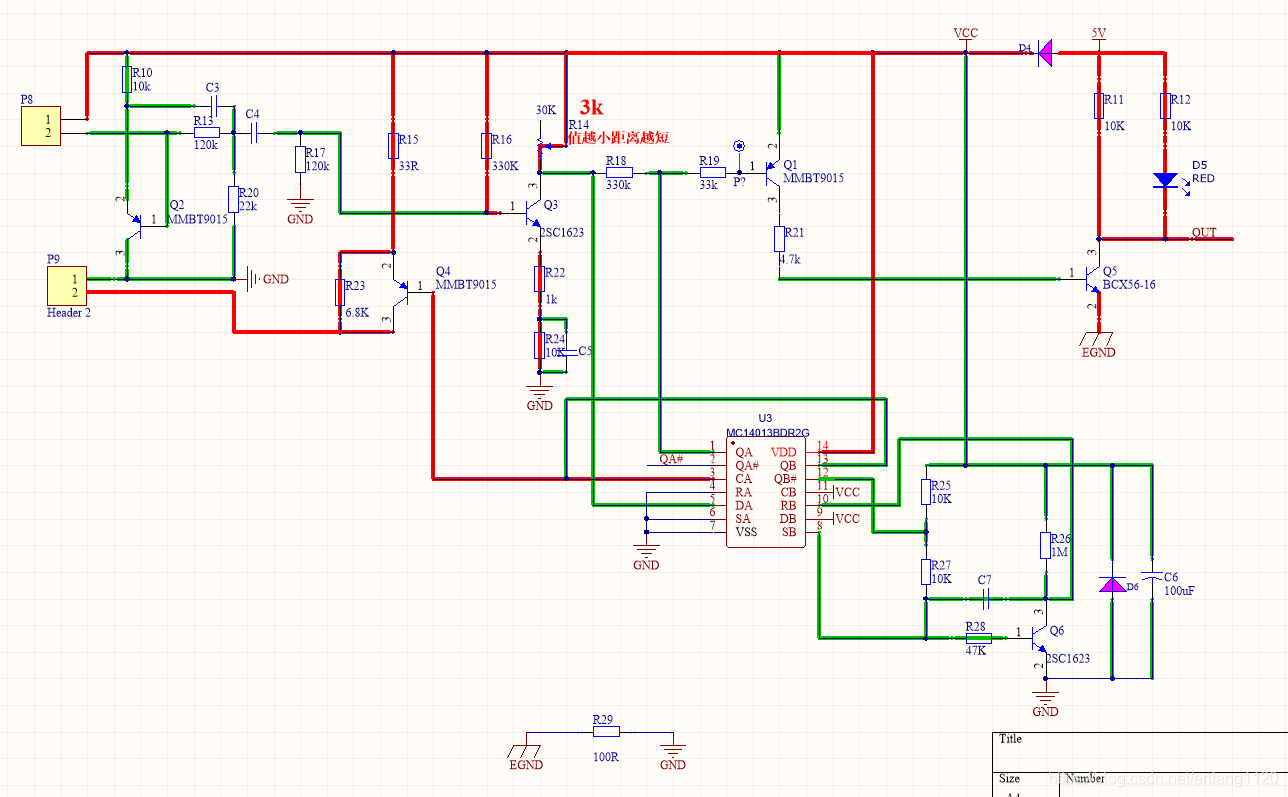
3、电路图分析
实物图片
1、拆解后的图片
2、里面用到的关键元器件如下
L6-->2SC1623(NPN) SOT23:
M6-->MMBT9015(PNP) SOT23:
BL-->BCX56-16(NPN) SOT89:
MC14013B 双D触发器:
100uF/16V 电解电容
3、电路图分析
 3202
3202

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


























