







最近可能要弄这个,所以先预习一下。
1 毫米波技术
对这块我不是很懂,好像现在毫米波用的最多的就是车载。说到车载最开始想到的就是倒车雷达,查了一下,倒车雷达基本上都是超声波的。那首先还是看看毫米波和超声波的区别。
| 特性 | 毫米波雷达 | 超声波 |
|---|---|---|
| 工作原理 | 发射毫米波(24GHz/77GHz),通过反射波计算距离、速度、角度 | 发射超声波(40kHz左右),通过回波时间测距 |
| 信号类型 | 电磁波(FMCW调频连续波或脉冲) | 机械声波 |
| 检测维度 | 可测距、测速、测角度(多目标跟踪) | 仅测距(单目标) |
| 穿透能力 | 可穿透塑料、玻璃、薄雾等 | 穿透性差,易被障碍物遮挡 |
综上,毫米波比超声波就是精度高,抗干扰能力强。但是成本比较高,超声波雷达:5~20元/个 毫米波雷达:500~3000元/个(77GHz更贵)。基本上一个毫米波可以买100个超声波。
此外,超声波雷达的算法更成熟。
和其它探测技术的区别,更详细。比较了毫米波,视觉,超声波,激光和红外。(mmWave Radar Sensor Introdution | Seeed Studio Wiki)
mmWave Radars Sensor | Camera | Ultrasonic Sensor | LiDAR (Laser Radar) | Passive Infrared Sensor (PIR) | |
|---|---|---|---|---|---|
| Privacy | Non-visual detection, hidden signal frequency band, low risk of data leakage | Collects images containing a large amount of private information, prone to leakage | Does not involve the collection of private images, but the signal is easily detectable | The scanned data can expose scene information, with a risk of leakage | Does not involve the collection of private images, but the signal is easily detectable |
| Cost | Moderate | The cost varies based on resolution and functions, with some types being relatively high | Low cost | High cost of equipment and maintenance | Low cost |
| Precision | High precision, capable of accurately detecting the distance, speed and angle of the target | Greatly affected by lighting and resolution | Limited precision in short-distance detection | High-precision 3D imaging, but affected by the environment | Low detection precision, can only determine movement |
| Stability | Not affected by lighting and temperature, with stable performance | Restricted by lighting conditions, poor performance in low light | Easily affected by environmental noise | Greatly affected by adverse weather | Easily affected by environmental factors such as heat sources |
2 毫米波模块
2.1 模块
在网上查了一下,目前技术比较先进的好像还是TI?
mmWave Radar Sensor Introdution | Seeed Studio Wiki
TI的产品如下:
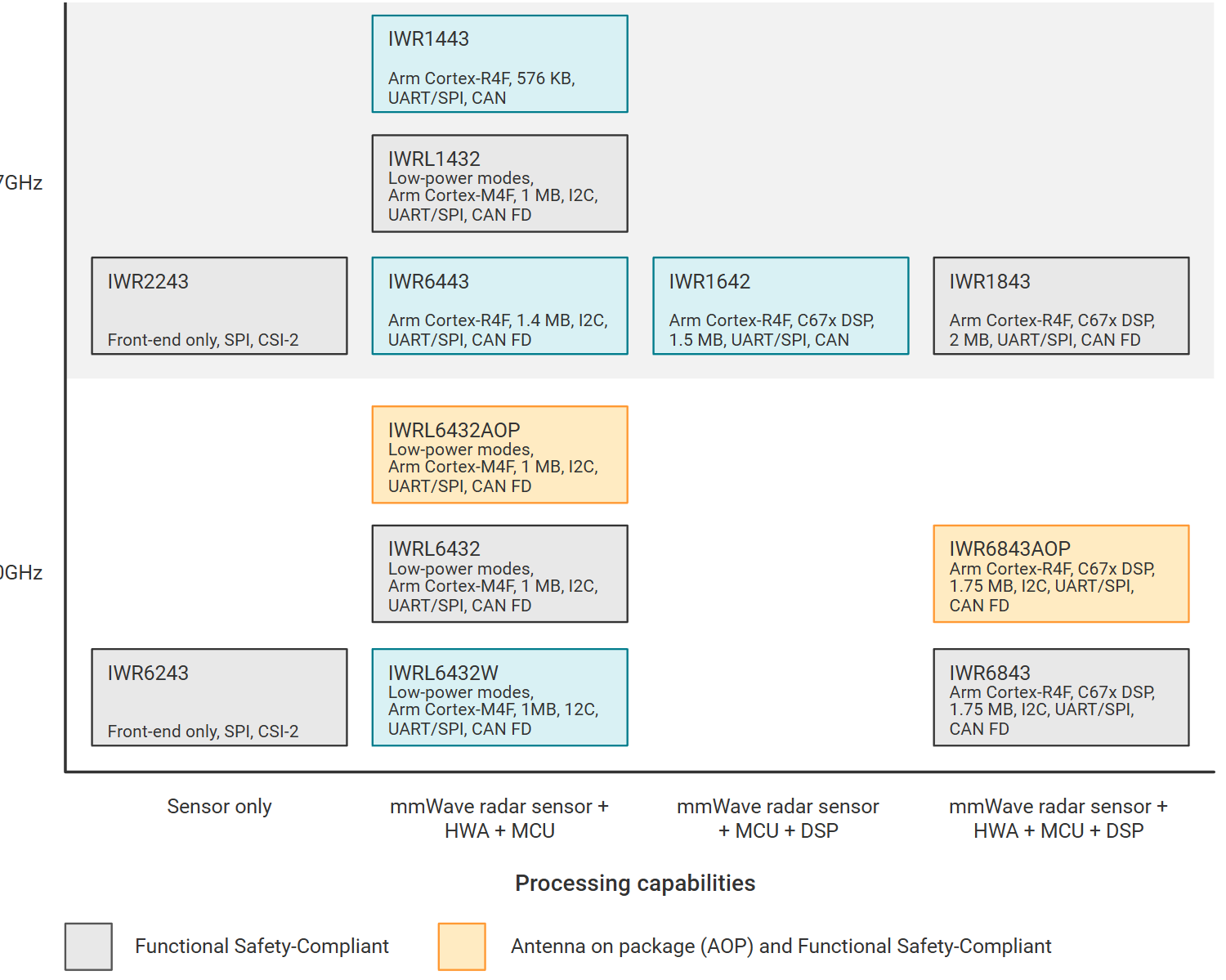
看来就是是否集成算法的区别了。
| 特性 | Sensor Only | Sensor + HWA + MCU | Sensor + MCU + DSP |
|---|---|---|---|
| 信号处理能力 | 需外接处理器 | 中等(HWA加速基础算法) | 强(DSP处理复杂算法) |
| 开发难度 | 高(需自建处理链) | 中(依赖TI基础库) | 中高(需优化DSP代码) |
| 实时性 | 依赖外部系统 | 高(HWA硬件加速) | 极高(DSP并行计算) |
| 功耗 | 取决于外部平台 | 低~中 | 中~高(DSP活跃时功耗高) |
| 成本 | 低(仅传感器) | 中 | 高(DSP芯片成本高) |
| 典型型号 | IWR1443裸片版 | IWR6843、IWR1843 | IWR6443、IWR6843AOP |
操作系统看起来可能是RTOS,可以参考:RTOS基础1(FreeRTOS+树莓派PICO环境)_pico rtos-CSDN博客
2.2 测距算法
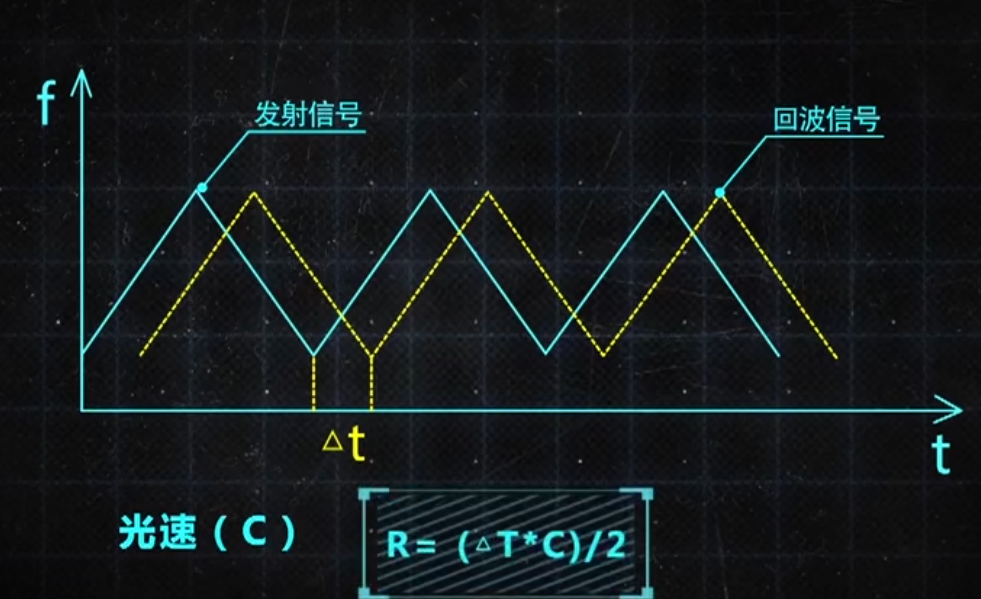
原理还是发射电磁波,然后接收回波。通过计算两者时间差来计算距离。
调频连续波FMCW 雷达发射一段线性调频的连续波信号(chirp),接收回波信号,与本振信号进行混频,得到 差频信号(IF,Intermediate Frequency)。其频率与目标距离成正比。
基本处理流程如下:
+-----------------+
| 1. 生成Chirp | → FMCW信号
+--------+--------+
|
v
+----------+-----------+
| 2. 发送Chirp + 接收回波 |
+----------+-----------+
|
v
+-------------+--------------+
| 3. 混频:Rx × Tx → IF信号 |
+-------------+--------------+
|
v
+----------+----------+
| 4. 低通滤波 + 采样 |
+----------+----------+
|
v
+-----+-----+
| 5. 1D FFT | → 得到频谱峰值
+-----+-----+
|
v
+------------+------------+
| 6. 计算距离: |
| R = (c × f_IF) / (2 × S) |
+----------------------------+
处理伪代码
// TI mmWave SDK中的关键步骤
void rangeProcessing(adcData) {
// 1. 加窗
applyHammingWindow(adcData);
// 2. Range FFT
fftResult = fft(adcData, N_FFT);
// 3. 峰值检测
peaks = findPeaks(fftResult);
// 4. CFAR滤波
validTargets = cfar(peaks);
// 5. 计算距离
for (target in validTargets) {
distance = (target.bin * c) / (2 * S * N_FFT);
}
}3 系统集成
看了一下目前市面上的模块,大部分还是串口居多。关于串口,可以参考这个:总线学习4--UART_mobaxterm uart-CSDN博客
| MCU | mmWave Sensor |
| 5V | VCC |
| GND | GND |
| TX | RX |
| RX | TX |
连接方式如下:
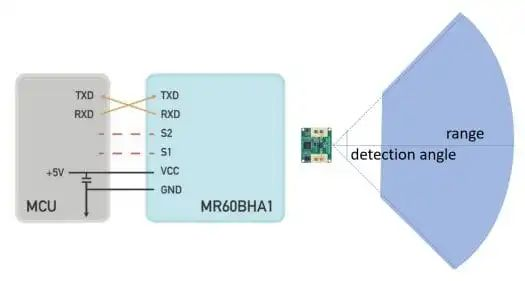
具体收到的数据就要看模块的解析了。。。
好吧,等实际参与了项目,再看看要点是在哪里。。。
4 参考
https://github.com/search?q=mmwave&type=repositories


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









