




4.1 基础算子
4.1.1 元素级算子(Element-wise)
什么是元素级算子
元素级算子就是对输入张量的每个元素独立进行运算,元素之间没有依赖关系。这种算子最容易并行化,也最容易向量化。
常见的元素级算子有Add、Sub、Mul、Div这些算术运算,还有ReLU、Sigmoid这些激活函数。
Add算子实现
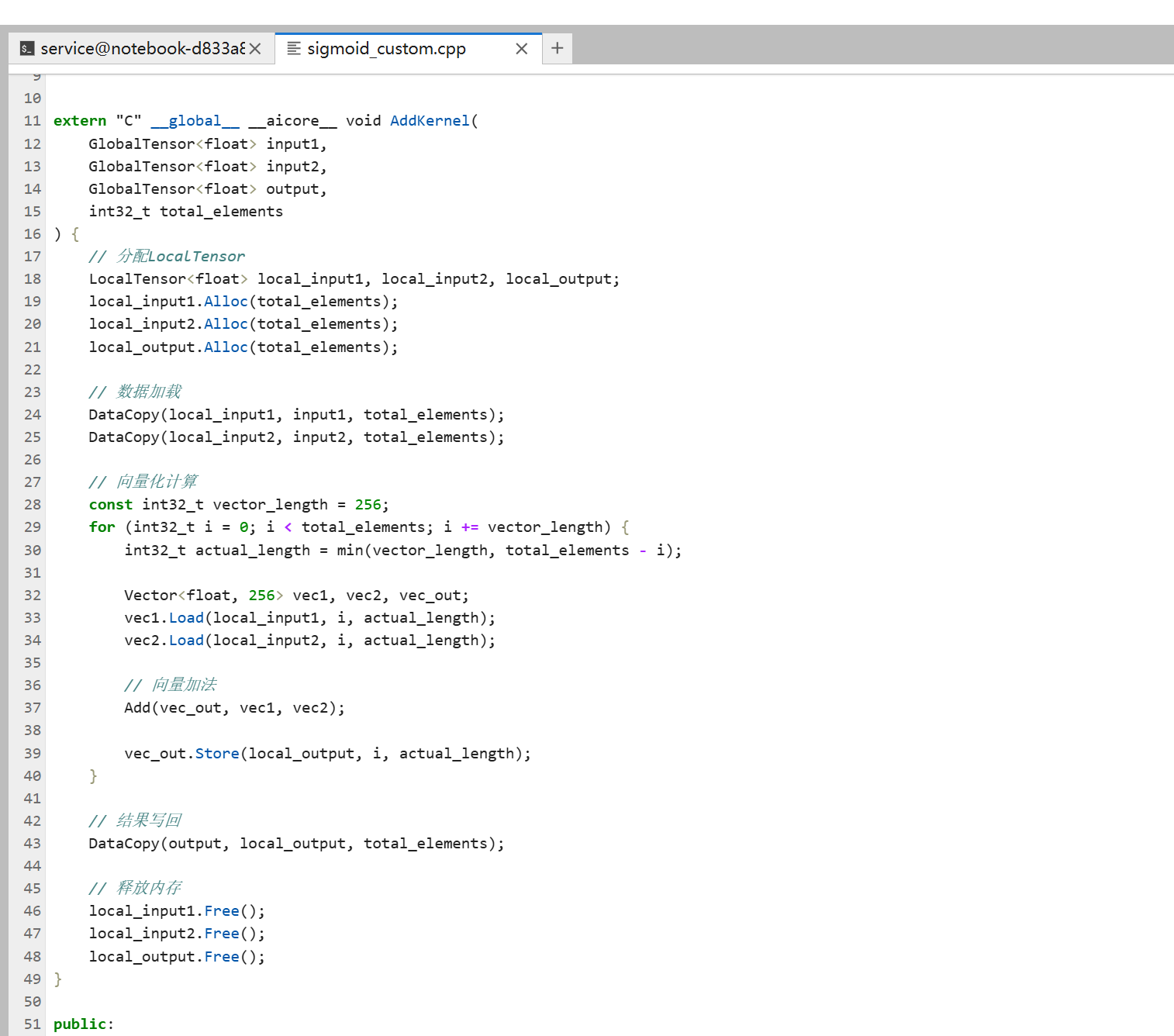
Add算子就是两个输入相加,输出对应位置的元素和。
// 概念性示例
extern "C" __global__ __aicore__ void AddKernel(
GlobalTensor<float> input1,
GlobalTensor<float> input2,
GlobalTensor<float> output,
int32_t total_elements
) {
// 分配LocalTensor
LocalTensor<float> local_input1, local_input2, local_output;
local_input1.Alloc(total_elements);
local_input2.Alloc(total_elements);
local_output.Alloc(total_elements);
// 数据加载
DataCopy(local_input1, input1, total_elements);
DataCopy(local_input2, input2, total_elements);
// 向量化计算
const int32_t vector_length = 256;
for (int32_t i = 0; i < total_elements; i += vector_length) {
int32_t actual_length = min(vector_length, total_elements - i);
Vector<float, 256> vec1, vec2, vec_out;
vec1.Load(local_input1, i, actual_length);
vec2.Load(local_input2, i, actual_length);
// 向量加法
Add(vec_out, vec1, vec2);
vec_out.Store(local_output, i, actual_length);
}
// 结果写回
DataCopy(output, local_output, total_elements);
// 释放内存
local_input1.Free();
local_input2.Free();
local_output.Free();
}
实现要点:元素级算子实现起来比较简单,主要是向量化循环,用Add API做向量加法。注意处理边界情况,如果元素数不是向量长度的倍数,要处理剩余的元素。
Sub、Mul、Div算子
Sub、Mul、Div算子和Add类似,只是用的API不同:
Sub算子:用Sub API,两个向量相减。
Mul算子:用Mul API,两个向量相乘。
Div算子:用Div API,两个向量相除。
实现思路都一样,就是加载数据、向量化计算、写回结果。
ReLU激活函数
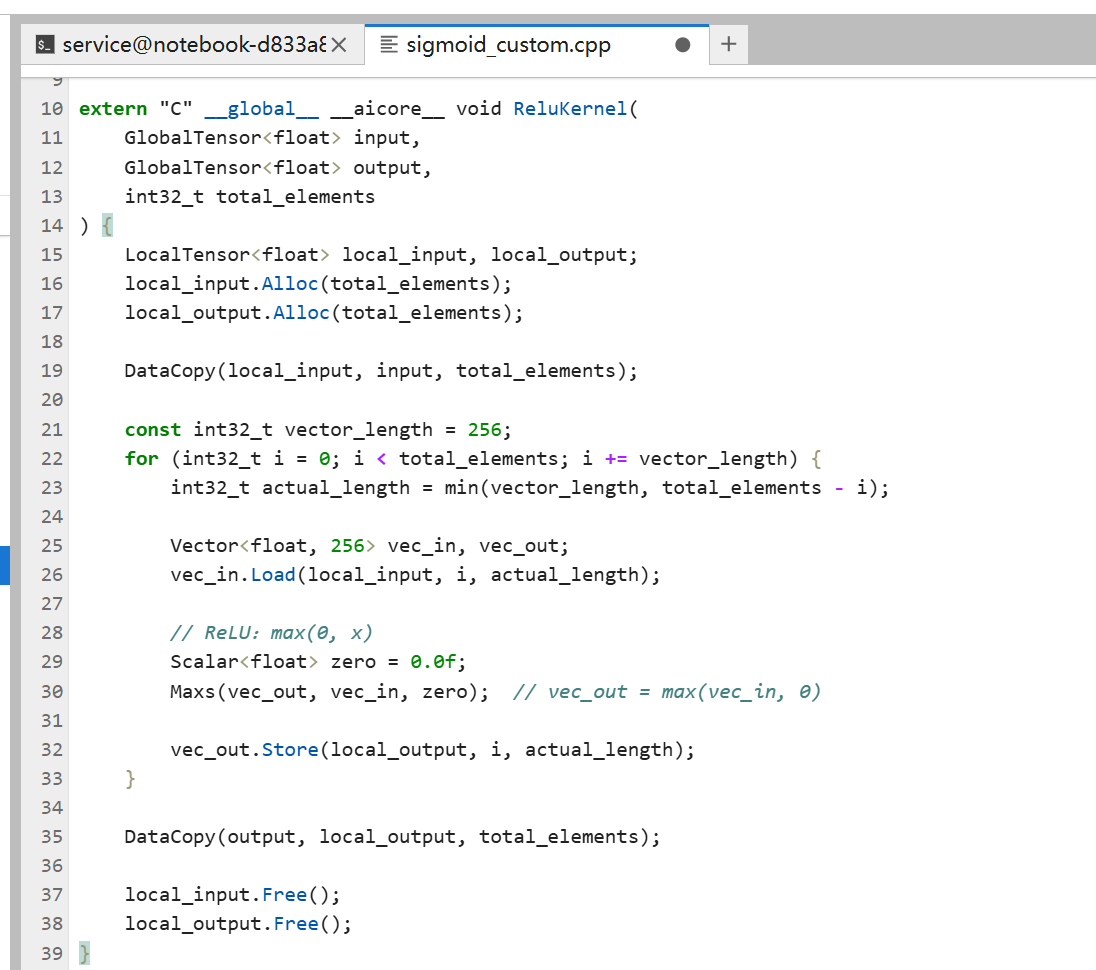
ReLU是max(0, x),就是如果x小于0就输出0,否则输出x。
// 概念性示例
extern "C" __global__ __aicore__ void ReluKernel(
GlobalTensor<float> input,
GlobalTensor<float> output,
int32_t total_elements
) {
LocalTensor<float> local_input, local_output;
local_input.Alloc(total_elements);
local_output.Alloc(total_elements);
DataCopy(local_input, input, total_elements);
const int32_t vector_length = 256;
for (int32_t i = 0; i < total_elements; i += vector_length) {
int32_t actual_length = min(vector_length, total_elements - i);
Vector<float, 256> vec_in, vec_out;
vec_in.Load(local_input, i, actual_length);
// ReLU:max(0, x)
Scalar<float> zero = 0.0f;
Maxs(vec_out, vec_in, zero); // vec_out = max(vec_in, 0)
vec_out.Store(local_output, i, actual_length);
}
DataCopy(output, local_output, total_elements);
local_input.Free();
local_output.Free();
}
ReLU实现用Maxs API,向量和标量0比较,取最大值。
Sigmoid和Tanh
Sigmoid和Tanh是更复杂的激活函数,需要用到数学函数API。
Sigmoid:sigmoid(x) = 1 / (1 + exp(-x))
// 概念性示例
// Sigmoid实现
Vector<float, 256> vec_in, vec_neg, vec_exp, vec_one, vec_out;
// vec_neg = -vec_in
Muls(vec_neg, vec_in, -1.0f);
// vec_exp = exp(-vec_in)
Exp(vec_exp, vec_neg);
// vec_one = 1 + exp(-vec_in)
Scalar<float> one = 1.0f;
Adds(vec_one, vec_exp, one);
// vec_out = 1 / (1 + exp(-vec_in))
Reciprocal(vec_out, vec_one);
Tanh:tanh(x) = (exp(2x) - 1) / (exp(2x) + 1)
实现思路类似,用Exp、Add、Sub、Div这些API组合起来。
Abs、Sqrt、Exp、Log
这些是数学函数算子,直接用对应的API就行:
Abs:用Abs API,取绝对值。
Sqrt:用Sqrt API,开平方。
Exp:用Exp API,自然指数。
Ln:用Ln API,自然对数。
实现都很简单,向量化循环,调用对应的API。
4.1.2 规约算子(Reduction)
什么是规约算子
规约算子就是把一个张量的所有元素归约成一个值或几个值。比如Sum把所有元素加起来,Max找最大值。
规约算子的特点是需要遍历所有元素,然后归约。实现起来比元素级算子复杂一些。
Sum算子实现
Sum算子就是把所有元素加起来。
// 概念性示例
extern "C" __global__ __aicore__ void SumKernel(
GlobalTensor<float> input,
GlobalTensor<float> output,
int32_t total_elements
) {
LocalTensor<float> local_input;
local_input.Alloc(total_elements);
DataCopy(local_input, input, total_elements);
// 先对每个块求和
const int32_t vector_length = 256;
LocalTensor<float> block_sums;
int32_t num_blocks = (total_elements + vector_length - 1) / vector_length;
block_sums.Alloc(num_blocks);
for (int32_t i = 0; i < total_elements; i += vector_length) {
int32_t actual_length = min(vector_length, total_elements - i);
Vector<float, 256> vec;
vec.Load(local_input, i, actual_length);
// 对当前块求和
Scalar<float> block_sum;
ReduceSum(block_sum, vec);
// 保存块的和
block_sum.Store(block_sums, i / vector_length);
}
// 对所有块的和再求和
Scalar<float> total_sum = 0.0f;
for (int32_t i = 0; i < num_blocks; i++) {
Scalar<float> block_sum;
block_sum.Load(block_sums, i);
total_sum = total_sum + block_sum;
}
// 写回结果
total_sum.Store(output, 0);
local_input.Free();
block_sums.Free();
}
实现要点:规约算子通常分两步,先对每个块归约,再对所有块的结果归约。这样可以充分利用向量化。
Mean算子
Mean就是Sum除以元素个数:
// 概念性示例
// 先求和
SumKernel(input, sum_output, total_elements);
// 再除以元素个数
Scalar<float> sum, mean;
sum.Load(sum_output, 0);
mean = sum / total_elements;
mean.Store(output, 0);
Max和Min算子
Max和Min找最大值和最小值,实现思路和Sum类似,用ReduceMax和ReduceMin API。
// 概念性示例
// Max实现
Vector<float, 256> vec;
Scalar<float> max_val;
ReduceMax(max_val, vec);
ArgMax和ArgMin
ArgMax和ArgMin不仅要找最大值最小值,还要找对应的索引位置。
// 概念性示例
// ArgMax实现
Vector<float, 256> vec;
Scalar<float> max_val;
Scalar<int32_t> max_idx;
ReduceMaxWithIndex(max_val, max_idx, vec); // 同时返回值和索引
4.1.3 索引算子
Gather算子
Gather算子根据索引从输入张量中收集元素。
// 概念性示例
extern "C" __global__ __aicore__ void GatherKernel(
GlobalTensor<float> input,
GlobalTensor<int32_t> indices,
GlobalTensor<float> output,
int32_t num_indices,
int32_t input_size
) {
LocalTensor<float> local_input, local_output;
LocalTensor<int32_t> local_indices;
local_input.Alloc(input_size);
local_indices.Alloc(num_indices);
local_output.Alloc(num_indices);
DataCopy(local_input, input, input_size);
DataCopy(local_indices, indices, num_indices);
// 根据索引收集元素
for (int32_t i = 0; i < num_indices; i++) {
Scalar<int32_t> idx;
idx.Load(local_indices, i);
Scalar<float> value;
value.Load(local_input, idx.GetValue());
value.Store(local_output, i);
}
DataCopy(output, local_output, num_indices);
local_input.Free();
local_indices.Free();
local_output.Free();
}
实现要点:Gather需要根据索引访问输入,索引访问可能不是连续的,所以性能可能不如元素级算子。
Scatter算子
Scatter是Gather的反向操作,根据索引把值散布到输出张量中。
// 概念性示例
// Scatter实现
for (int32_t i = 0; i < num_indices; i++) {
Scalar<int32_t> idx;
Scalar<float> value;
idx.Load(local_indices, i);
value.Load(local_input, i);
// 散布到输出
value.Store(local_output, idx.GetValue());
}
注意Scatter可能有索引冲突,多个输入值要散布到同一个位置,需要定义合并规则(比如相加、取最大值等)。
IndexSelect算子
IndexSelect是Gather的特殊情况,沿着某个维度选择元素。
实现思路和Gather类似,但需要处理多维张量的索引计算。
4.2 矩阵运算算子
4.2.1 矩阵乘法(MatMul)
MatMul的基本原理
矩阵乘法是深度学习里最常用的运算。两个矩阵A和B相乘,A是[m, k],B是[k, n],结果C是[m, n]。
计算规则是:C[i, j] = sum(A[i, :] * B[:, j])
MatMul的实现思路
矩阵乘法实现起来比较复杂,主要考虑:
分块(Tiling):大矩阵要分块处理,每块的大小要适合Local Memory。
数据重用:A的行和B的列可以重用,要充分利用这个特性。
Cube Unit利用:昇腾处理器有专门的矩阵乘法单元(Cube Unit),要充分利用。
// 概念性示例(简化版)
extern "C" __global__ __aicore__ void MatMulKernel(
GlobalTensor<float> A,
GlobalTensor<float> B,
GlobalTensor<float> C,
int32_t M, int32_t K, int32_t N
) {
// 分块大小
const int32_t tile_m = 64;
const int32_t tile_k = 64;
const int32_t tile_n = 64;
// 分配LocalTensor
LocalTensor<float> local_A, local_B, local_C;
local_A.Alloc(tile_m * tile_k);
local_B.Alloc(tile_k * tile_n);
local_C.Alloc(tile_m * tile_n);
// 初始化C为0
Memset(local_C, 0, tile_m * tile_n);
// 分块计算
for (int32_t m = 0; m < M; m += tile_m) {
for (int32_t n = 0; n < N; n += tile_n) {
// 初始化当前块的C
Memset(local_C, 0, tile_m * tile_n);
// K维度累加
for (int32_t k = 0; k < K; k += tile_k) {
// 加载A的块
LoadTile(local_A, A, m, k, tile_m, tile_k, M, K);
// 加载B的块
LoadTile(local_B, B, k, n, tile_k, tile_n, K, N);
// 矩阵乘法:C += A * B
MatMul(local_C, local_A, local_B, local_C);
}
// 写回C的块
StoreTile(C, local_C, m, n, tile_m, tile_n, M, N);
}
}
local_A.Free();
local_B.Free();
local_C.Free();
}
实现要点:矩阵乘法要分块,充分利用Cube Unit。分块大小要合适,太小了利用率低,太大了Local Memory装不下。
MatMul的优化技巧
数据布局优化:矩阵数据怎么存储很重要,按行存储还是按列存储,影响访问效率。
K维度分块:K维度要分块累加,这样可以重用A和B的数据。
流水线化:加载下一块数据、计算当前块、写回上一块结果,可以流水线化。
4.2.2 矩阵转置(Transpose)
Transpose的基本原理
矩阵转置就是把矩阵的行列互换,A[i, j]变成A[j, i]。
Transpose的实现
// 概念性示例
extern "C" __global__ __aicore__ void TransposeKernel(
GlobalTensor<float> input,
GlobalTensor<float> output,
int32_t height, int32_t width
) {
LocalTensor<float> local_input, local_output;
local_input.Alloc(height * width);
local_output.Alloc(height * width);
DataCopy(local_input, input, height * width);
// 转置
for (int32_t i = 0; i < height; i++) {
for (int32_t j = 0; j < width; j++) {
Scalar<float> value;
value.Load(local_input, i * width + j);
value.Store(local_output, j * height + i);
}
}
DataCopy(output, local_output, height * width);
local_input.Free();
local_output.Free();
}
实现要点:转置的访问模式不是连续的,可能影响性能。可以用向量化优化,或者用专门的转置指令。
4.2.3 批处理矩阵乘法(BatchMatMul)
BatchMatMul的基本原理
BatchMatMul就是多个矩阵乘法一起做。输入是[batch, m, k]和[batch, k, n],输出是[batch, m, n]。
BatchMatMul的实现
// 概念性示例
extern "C" __global__ __aicore__ void BatchMatMulKernel(
GlobalTensor<float> A,
GlobalTensor<float> B,
GlobalTensor<float> C,
int32_t batch, int32_t M, int32_t K, int32_t N
) {
for (int32_t b = 0; b < batch; b++) {
// 每个batch的矩阵乘法
GlobalTensor<float> A_batch = A[b];
GlobalTensor<float> B_batch = B[b];
GlobalTensor<float> C_batch = C[b];
MatMulKernel(A_batch, B_batch, C_batch, M, K, N);
}
}
实现要点:BatchMatMul可以并行处理不同的batch,充分利用多核。
4.2.4 矩阵分解相关算子
矩阵分解算子比如SVD、QR分解这些,实现起来比较复杂,通常需要调用专门的数学库或者用迭代算法实现。这里就不详细展开了,有兴趣可以查专门的资料。
4.3 卷积相关算子
4.3.1 卷积(Convolution)
卷积的基本原理
卷积是深度学习的核心运算。输入是[N, C, H, W]的特征图,卷积核是[K, C, Kh, Kw],输出是[N, K, H’, W’]。
计算规则是:对输出的每个位置,用卷积核在输入上滑动窗口,计算点积。
卷积的实现思路
卷积实现起来很复杂,主要有几种方法:
直接卷积:按照定义直接计算,简单但慢。
im2col转换:把卷积转换成矩阵乘法,用MatMul实现。
Winograd算法:用Winograd算法加速,减少计算量。
分组卷积优化:如果卷积是分组的,可以优化。
// 概念性示例(im2col方法)
extern "C" __global__ __aicore__ void Conv2DKernel(
GlobalTensor<float> input, // [N, C, H, W]
GlobalTensor<float> weight, // [K, C, Kh, Kw]
GlobalTensor<float> output, // [N, K, H', W']
int32_t N, int32_t C, int32_t H, int32_t W,
int32_t K, int32_t Kh, int32_t Kw,
int32_t stride_h, int32_t stride_w,
int32_t pad_h, int32_t pad_w
) {
// 1. im2col:把输入转换成矩阵
// 2. 矩阵乘法:weight * im2col(input)
// 3. col2im:把结果转换回特征图格式
}
实现要点:卷积通常用im2col转换成矩阵乘法,然后用MatMul实现。im2col有内存开销,但实现简单,性能也不错。
4.3.2 池化(Pooling)
池化的基本原理
池化是对特征图做下采样,常见的有MaxPooling和AvgPooling。
MaxPooling:在窗口内取最大值。
AvgPooling:在窗口内取平均值。
MaxPooling实现
// 概念性示例
extern "C" __global__ __aicore__ void MaxPool2DKernel(
GlobalTensor<float> input,
GlobalTensor<float> output,
int32_t N, int32_t C, int32_t H, int32_t W,
int32_t kernel_h, int32_t kernel_w,
int32_t stride_h, int32_t stride_w
) {
// 对每个输出位置
for (int32_t n = 0; n < N; n++) {
for (int32_t c = 0; c < C; c++) {
for (int32_t oh = 0; oh < output_h; oh++) {
for (int32_t ow = 0; ow < output_w; ow++) {
// 在窗口内找最大值
float max_val = -INF;
for (int32_t kh = 0; kh < kernel_h; kh++) {
for (int32_t kw = 0; kw < kernel_w; kw++) {
int32_t ih = oh * stride_h + kh;
int32_t iw = ow * stride_w + kw;
float val = input[n][c][ih][iw];
max_val = max(max_val, val);
}
}
output[n][c][oh][ow] = max_val;
}
}
}
}
}
实现要点:池化可以向量化,对多个通道并行处理。也可以用专门的池化指令。
4.3.3 反卷积(Deconvolution)
反卷积也叫转置卷积,是卷积的逆操作。实现思路和卷积类似,但更复杂一些。通常也用im2col或者专门的算法实现。
4.3.4 分组卷积(Group Convolution)
分组卷积是把输入通道分成几组,每组独立做卷积,最后把结果拼接起来。这样可以减少计算量,适合深度可分离卷积这种场景。
实现要点:分组卷积可以并行处理不同的组,充分利用多核。
4.4 归一化算子
4.4.1 BatchNorm
BatchNorm的基本原理
BatchNorm是对每个通道在batch维度上做归一化。计算步骤:
- 计算均值和方差:mean = mean(x), var = var(x)
- 归一化:y = (x - mean) / sqrt(var + eps)
- 缩放和平移:y = gamma * y + beta
BatchNorm的实现
// 概念性示例
extern "C" __global__ __aicore__ void BatchNormKernel(
GlobalTensor<float> input,
GlobalTensor<float> output,
GlobalTensor<float> gamma,
GlobalTensor<float> beta,
GlobalTensor<float> running_mean,
GlobalTensor<float> running_var,
int32_t N, int32_t C, int32_t H, int32_t W,
float eps
) {
// 1. 计算均值和方差(规约操作)
// 2. 归一化
// 3. 缩放和平移
}
实现要点:BatchNorm需要先做规约(计算均值和方差),再做元素级运算(归一化、缩放、平移)。
4.4.2 LayerNorm
LayerNorm的基本原理
LayerNorm是对每个样本在特征维度上做归一化。和BatchNorm的区别是归一化的维度不同。
实现思路和BatchNorm类似,也是先规约再归一化,但规约的维度不同。
4.4.3 InstanceNorm和GroupNorm
InstanceNorm和GroupNorm是BatchNorm的变种,归一化的维度不同:
InstanceNorm:对每个样本的每个通道独立归一化。
GroupNorm:把通道分组,对每组独立归一化。
实现思路都类似,主要是规约的维度不同。
学习检查点
学完这一篇,你应该能做到这些:
理解各种常用算子的实现方法,包括元素级算子、规约算子、索引算子。掌握矩阵运算算子的实现,特别是矩阵乘法的分块策略。了解卷积相关算子的实现思路,知道im2col等方法。理解归一化算子的实现,知道如何组合规约和元素级运算。
实践练习
实现ReLU算子:实现一个ReLU激活函数算子,用向量化API,完成从编写到测试的全流程。
实现Sum算子:实现一个Sum规约算子,先对块归约,再对块结果归约,理解规约的实现方法。
优化矩阵乘法:实现一个简单的矩阵乘法算子,尝试不同的分块大小,看看性能差异。理解Tiling策略的重要性。
实现简单卷积:用im2col方法实现一个简单的2D卷积,理解卷积如何转换成矩阵乘法。
下一步:掌握了常用算子的实现后,就可以学习高级优化技术了。下一章会讲性能优化、精度优化、算子融合这些高级话题,到时候你就能写出高性能的算子了。
2025年昇腾CANN训练营第二季,基于CANN开源开放全场景,推出0基础入门系列、码力全开特辑、开发者案例等专题课程,助力不同阶段开发者快速提升算子开发技能。获得Ascend C算子中级认证,即可领取精美证书,完成社区任务更有机会赢取华为手机,平板、开发板等大奖。
报名链接:https://www.hiascend.com/developer/activities/cann20252
社区地址:https://www.hiascend.com/developer


















 909
909

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











