




3.1 算子开发流程
3.1.1 算子需求分析
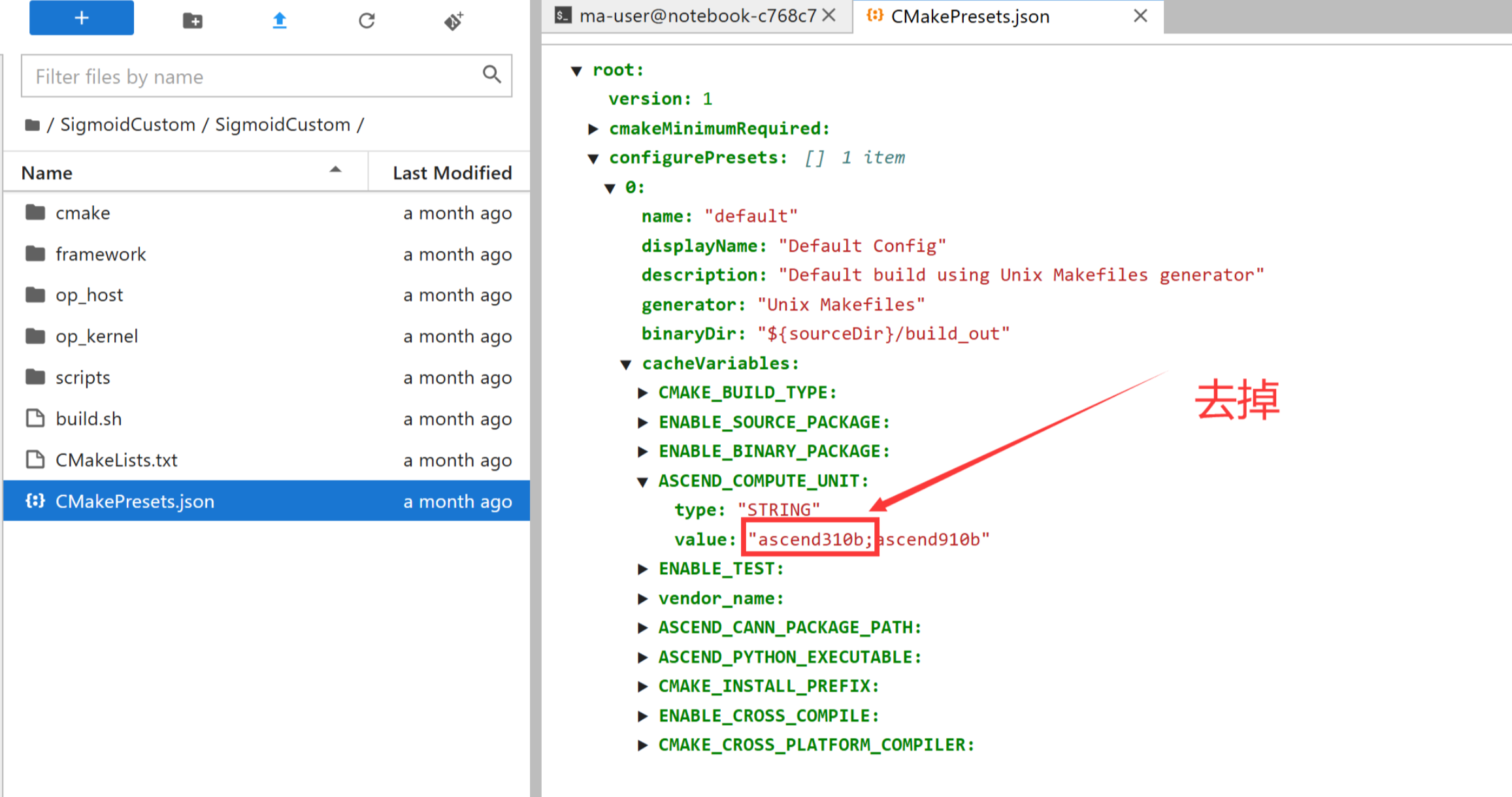
注:运行前看好自己的版本:
明确算子功能
开发算子之前,先得搞清楚这个算子要干什么。比如要做一个Add算子,那就是两个输入相加得到输出。听起来简单,但实际要考虑的东西还挺多。
输入输出规格:输入有几个?输出有几个?每个输入输出的形状是什么?数据类型是什么?这些都要明确。
边界情况:空输入怎么处理?形状不匹配怎么办?数值溢出怎么处理?这些边界情况都要考虑。
性能要求:这个算子对性能有什么要求?是追求极致性能,还是够用就行?这会影响你的实现方案。
分析计算特点
不同的算子有不同的计算特点,分析清楚才能选对实现方法。
计算密集还是内存密集:如果计算很复杂,那要优化计算部分。如果主要是内存访问,那要优化内存访问模式。
数据依赖:计算之间有没有依赖关系?能不能并行?能不能向量化?
数据重用:中间结果能不能重用?能不能减少重复计算?
3.1.2 算子设计思路
确定实现方案
根据算子特点,确定实现方案。
简单算子:像Add、Mul这种元素级算子,直接用向量化API就行,实现起来比较简单。
复杂算子:像卷积、矩阵乘法这种,可能需要分块(Tiling),需要仔细设计数据流和计算流。
特殊算子:有些算子可能需要特殊的优化技巧,比如算子融合、内存复用这些。
设计数据流
数据流设计很重要,直接影响性能。
数据加载策略:一次加载多少数据?什么时候加载?是提前加载还是按需加载?
计算顺序:先算哪部分?后算哪部分?能不能流水线化?
结果写回策略:什么时候写回结果?是算完一块写一块,还是算完所有再写?
3.1.3 算子实现步骤
第一步:创建工程
在ModelArts Notebook里,先创建工程目录结构:
# 创建工程目录
mkdir my_operator
cd my_operator
# 创建源代码目录
mkdir src include
工程结构大概这样:
src/:放核函数代码include/:放头文件build.sh:编译脚本CMakeLists.txt:CMake配置文件(如果用CMake的话)
第二步:编写核函数
在src/目录下创建核函数文件,比如add_kernel.cpp:
// 概念性示例
#include "ascendc.h"
extern "C" __global__ __aicore__ void AddKernel(
GlobalTensor<float> input1,
GlobalTensor<float> input2,
GlobalTensor<float> output,
int32_t total_length
) {
// 1. 分配LocalTensor
LocalTensor<float> local_input1;
LocalTensor<float> local_input2;
LocalTensor<float> local_output;
local_input1.Alloc(total_length);
local_input2.Alloc(total_length);
local_output.Alloc(total_length);
// 2. 数据加载
DataCopy(local_input1, input1, total_length);
DataCopy(local_input2, input2, total_length);
// 3. 计算
Add(local_output, local_input1, local_input2);
// 4. 结果写回
DataCopy(output, local_output, total_length);
// 5. 释放内存
local_input1.Free();
local_input2.Free();
local_output.Free();
}
这只是个概念性示例,实际的API调用会更复杂一些。
第三步:实现Tiling函数
如果算子需要分块处理,还要实现Tiling函数。Tiling函数在Host端运行,计算每个块的大小和偏移。
// 概念性示例
void TilingFunc(TilingData* tiling) {
// 计算每个块的大小
int32_t block_size = 256;
int32_t total_blocks = (total_length + block_size - 1) / block_size;
tiling->block_size = block_size;
tiling->total_blocks = total_blocks;
}
第四步:注册算子
在Host端注册算子,让框架知道有这个算子:
// 概念性示例
void RegisterOperator() {
// 注册算子原型
RegisterOp("Add", AddKernel, TilingFunc);
}
3.1.4 算子测试验证
CPU侧调试
Ascend C支持CPU侧调试,可以在CPU上模拟NPU的行为,方便调试。
# 概念性命令
# 在CPU模式下运行算子
cpu_run_kernel AddKernel input1 input2 output
CPU侧调试的好处是速度快,不需要NPU硬件,但只能验证逻辑正确性,不能验证性能。
NPU侧验证
逻辑没问题后,要在NPU上实际跑一下,验证性能和正确性。
# 概念性命令
# 在NPU上运行算子
npu_run_kernel AddKernel input1 input2 output
NPU侧验证能看到真实的性能,也能发现一些CPU侧发现不了的问题。
结果验证
验证结果是否正确:
功能正确性:输出结果对不对?可以用参考实现(比如NumPy)对比一下。
边界情况:空输入、异常输入这些边界情况都测试一下。
性能指标:算子的执行时间、内存使用、NPU利用率这些指标都要看看。
3.2 向量化编程
3.2.1 向量化指令集
什么是向量化指令
向量化指令就是一条指令同时处理多个数据的指令。比如Add指令,可以同时把两个向量的所有元素加起来,而不是循环一个一个加。
Ascend C提供了丰富的向量化指令,覆盖了大部分常见的运算。
向量加载和存储指令
Load指令:从LocalTensor加载数据到向量。
// 概念性示例
Vector<float, 256> vec;
vec.Load(local_tensor, offset); // 从local_tensor的offset位置加载256个元素
Store指令:把向量数据存回LocalTensor。
// 概念性示例
Vector<float, 256> vec;
// ... 对vec进行计算 ...
vec.Store(local_tensor, offset); // 存回local_tensor的offset位置
向量运算指令
向量运算指令有很多,常用的有:
算术运算:Add、Sub、Mul、Div,这些是基础的加减乘除。
数学函数:Exp、Ln、Sqrt、Abs,这些是数学函数。
比较运算:Max、Min,找最大值最小值。
融合指令:FusedMulAdd,乘加融合,一条指令完成乘法和加法,性能更好。
3.2.2 向量加载和存储
加载策略
数据加载有几种策略:
顺序加载:按顺序一块一块地加载,简单直接。
预取加载:提前加载下一块数据,让加载和计算重叠。
批量加载:一次加载多块数据,减少加载次数。
选择哪种策略要看具体情况,通常预取加载效果比较好。
存储策略
存储也有策略:
立即存储:算完一块就存一块,简单但可能影响流水线。
延迟存储:算完所有再统一存储,可能更高效。
批量存储:一次存储多块数据。
对齐要求
加载和存储都要注意对齐。数据不对齐的话,可能要多访问一次内存,或者访问跨缓存行,都很慢。
// 概念性示例
// 确保offset是向量长度的倍数
int32_t aligned_offset = (offset + vector_length - 1) / vector_length * vector_length;
vec.Load(local_tensor, aligned_offset);
3.2.3 向量运算操作
元素级运算
元素级运算就是对向量的每个元素分别做运算:
// 概念性示例
Vector<float, 256> a, b, c;
// 向量加法:c[i] = a[i] + b[i]
Add(c, a, b);
// 向量乘法:c[i] = a[i] * b[i]
Mul(c, a, b);
// 向量最大值:c[i] = max(a[i], b[i])
Max(c, a, b);
标量运算
标量和向量的运算:
// 概念性示例
Vector<float, 256> vec;
Scalar<float> s = 3.14;
// 向量加标量:vec[i] = vec[i] + s
Adds(vec, vec, s);
// 向量乘标量:vec[i] = vec[i] * s
Muls(vec, vec, s);
归约运算
归约运算就是把向量的所有元素归约成一个值:
// 概念性示例
Vector<float, 256> vec;
Scalar<float> sum;
// 求和
ReduceSum(sum, vec);
// 求最大值
ReduceMax(max_val, vec);
3.2.4 向量化优化技巧
循环向量化
把标量循环改成向量化循环:
// 标量版本(慢)
for (int i = 0; i < n; i++) {
c[i] = a[i] + b[i];
}
// 向量化版本(快)
for (int i = 0; i < n; i += vector_length) {
Vector<float, 256> va, vb, vc;
va.Load(a, i);
vb.Load(b, i);
Add(vc, va, vb);
vc.Store(c, i);
}
数据重用
如果数据要用多次,尽量在向量里多待一会儿:
// 概念性示例
Vector<float, 256> vec;
vec.Load(local_tensor, offset);
// 用vec做多个运算
Add(result1, vec, vec);
Mul(result2, vec, vec);
// vec不用重复加载
融合操作
尽量用融合指令,减少指令数:
// 分开写(两条指令)
Mul(temp, a, b);
Add(c, temp, c);
// 融合指令(一条指令,更快)
FusedMulAdd(c, a, b, c); // c = a * b + c
3.3 并行计算
3.3.1 多核并行计算
并行执行模型
昇腾处理器有多个AI Core,可以并行执行。每个Core执行同一个核函数,但处理不同的数据块。
// 概念性示例
// 核函数会被多个Core并行执行
// 每个Core处理不同的数据块
extern "C" __global__ __aicore__ void MyKernel(...) {
// 获取当前Core的ID
int32_t core_id = GetCoreId();
// 根据Core ID计算要处理的数据范围
int32_t start = core_id * block_size;
int32_t end = start + block_size;
// 处理这个范围的数据
ProcessBlock(start, end);
}
数据分块策略
数据怎么分块很重要:
均匀分块:每个Core处理相同大小的块,简单但可能不够灵活。
负载均衡:根据数据特点,让每个Core的负载尽量均衡。
边界处理:分块的时候要注意边界,确保所有数据都被处理,不重复不遗漏。
3.3.2 数据并行和任务并行
数据并行(Data Parallelism)
数据并行就是不同的Core处理不同的数据:
// 概念性示例
// 每个Core处理不同的数据块
void ProcessData() {
int32_t core_id = GetCoreId();
int32_t total_cores = GetTotalCores();
// 计算这个Core要处理的数据范围
int32_t block_size = total_data / total_cores;
int32_t start = core_id * block_size;
int32_t end = (core_id == total_cores - 1) ? total_data : start + block_size;
// 处理这个范围
for (int i = start; i < end; i++) {
ProcessElement(i);
}
}
数据并行适合数据之间没有依赖的情况,比如元素级算子。
任务并行(Task Parallelism)
任务并行就是不同的Core执行不同的任务:
// 概念性示例
// 不同的Core执行不同的任务阶段
void ProcessPipeline() {
int32_t core_id = GetCoreId();
if (core_id == 0) {
// Core 0负责数据加载
LoadData();
} else if (core_id == 1) {
// Core 1负责计算
Compute();
} else if (core_id == 2) {
// Core 2负责结果写回
WriteBack();
}
}
任务并行适合流水线场景,但实现起来复杂一些。
3.3.3 线程同步机制
为什么需要同步
多个Core并行执行的时候,有时候需要同步。比如一个Core要等另一个Core的结果,或者多个Core要协调访问共享资源。
同步原语
Ascend C提供了同步原语:
Barrier(屏障):等待所有Core都到达这个点,再继续执行。
// 概念性示例
void SynchronizedProcess() {
// 每个Core执行自己的计算
DoLocalCompute();
// 等待所有Core完成
Barrier();
// 所有Core都完成后,继续执行
DoGlobalCompute();
}
原子操作:对共享变量进行原子操作,避免竞争。
// 概念性示例
// 原子加法
AtomicAdd(shared_counter, value);
3.3.4 负载均衡
负载不均衡的问题
如果负载不均衡,有些Core很忙,有些Core很闲,整体性能就上不去。比如数据分块不均匀,或者不同块的计算复杂度不同。
负载均衡策略
动态分配:根据Core的负载情况,动态分配任务。负载轻的Core多分点任务。
工作窃取:空闲的Core可以从忙碌的Core那里"偷"一些任务来做。
自适应分块:根据数据特点,动态调整分块大小,让每个Core的负载尽量均衡。
性能监控
监控每个Core的负载情况,找出瓶颈:
// 概念性示例
void MonitorLoad() {
int32_t core_id = GetCoreId();
int32_t start_time = GetTime();
// 执行计算
DoCompute();
int32_t end_time = GetTime();
int32_t duration = end_time - start_time;
// 记录每个Core的执行时间
LogCoreTime(core_id, duration);
}
根据监控结果,调整分块策略,优化负载均衡。
学习检查点
学完这一篇,你应该能做到这些:
理解算子开发的完整流程,从需求分析到测试验证。掌握向量化编程,知道怎么用向量指令,怎么优化向量化代码。理解并行计算,知道数据并行和任务并行的区别,知道怎么同步和负载均衡。能够实现一个简单的算子,比如Add或Mul,完成从编写到测试的全流程。
实践练习
实现Add算子:在ModelArts Notebook中创建一个工程,实现一个Add算子。两个输入相加得到输出,用向量化API实现。完成编译、部署、测试的全流程。
向量化优化:实现一个向量加法的算子,先用标量循环实现,再改成向量化实现,对比性能差异。理解向量化的优势。
并行计算实验:实现一个需要多Core并行的算子,比如大矩阵的加法。理解数据分块、Core同步这些概念。
性能调优:对一个算子进行性能调优,比如调整分块大小、优化内存访问、使用融合指令等,看看性能能提升多少。
下一步:掌握了算子开发的基础后,就可以学习常用算子的实现了。下一章会讲各种常见算子的实现方法,比如元素级算子、规约算子、矩阵运算算子等,到时候你就能实现更复杂的算子了。
2025年昇腾CANN训练营第二季,基于CANN开源开放全场景,推出0基础入门系列、码力全开特辑、开发者案例等专题课程,助力不同阶段开发者快速提升算子开发技能。获得Ascend C算子中级认证,即可领取精美证书,完成社区任务更有机会赢取华为手机,平板、开发板等大奖。
报名链接:https://www.hiascend.com/developer/activities/cann20252
社区地址:https://www.hiascend.com/developer


















 909
909

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











