







目标检测 SSD: Single Shot MultiBox Detector - VGG16的魔改
flyish
看图
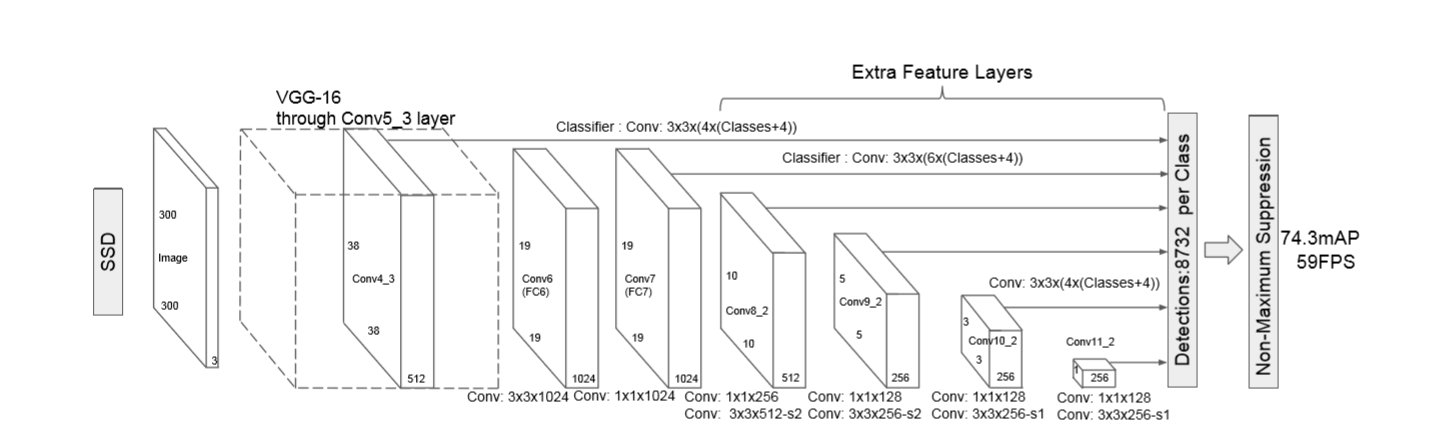
前部分是VGG16,VGG16中的FC6和FC7改成了卷积层,后部分是SSD自定义的层,自定义的层叫Extra Feature Layders
到detection的箭头一共有6个
相当于从6层卷积层中get features.
特征大小是38*38、19*19、10*10、5*5、3*3、1*1
以下6层分别是
38×38
Conv4_3
19×19
Conv7
10×10
Conv8_2
5×5
Conv9_2
3×3
Conv10_2
1×1
Conv11_2
VGG16中的片段
(26): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(27): ReLU(inplace)
(28): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(29): ReLU(inplace)
(30): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
SSD根据上面的30往下接是(相当于FC6和FC7改成了卷积层)
(31): Conv2d(512, 1024, kernel_size=(3, 3), stride=(1, 1), padding=(6, 6), dilation=(6, 6))
(32): ReLU(inplace)
(33): Conv2d(1024, 1024, kernel_size=(1, 1), stride=(1, 1))
(34): ReLU(inplace)
VGG16去掉了
(classifier): Sequential(
(0): Linear(in_features=25088, out_features=4096, bias=True)
(1): ReLU(inplace)
(2): Dropout(p=0.5)
(3): Linear(in_features=4096, out_features=4096, bias=True)
(4): ReLU(inplace)
(5): Dropout(p=0.5)
(6): Linear(in_features=4096, out_features=1000, bias=True)
)
default box
特征大小3838、1919、1010、55、33、11
自定规则的 4, 6, 6, 6, 4, 4
(38*38*4 + 19*19*6 + 10*10*6 + 5*5*6 + 3*3*4 + 1*1*4)= 8732个default box
(extras): ModuleList(
(0): Sequential(
(0): Conv2d(1024, 256, kernel_size=(1, 1), stride=(1, 1))
(1): ReLU()
(2): Conv2d(256, 512, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1))
(3): ReLU()
)
(1): Sequential(
(0): Conv2d(512, 128, kernel_size=(1, 1), stride=(1, 1))
(1): ReLU()
(2): Conv2d(128, 256, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1))
(3): ReLU()
)
(2): Sequential(
(0): Conv2d(256, 128, kernel_size=(1, 1), stride=(1, 1))
(1): ReLU()
(2): Conv2d(128, 256, kernel_size=(3, 3), stride=(1, 1))
(3): ReLU()
)
(3): Sequential(
(0): Conv2d(256, 128, kernel_size=(1, 1), stride=(1, 1))
(1): ReLU()
(2): Conv2d(128, 256, kernel_size=(3, 3), stride=(1, 1))
(3): ReLU()
)
)
Detection之前完整的就是
SSD(
(base_net): ModuleList(
(0): Conv2d(3, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(1): ReLU(inplace)
(2): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(3): ReLU(inplace)
(4): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
(5): Conv2d(64, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(6): ReLU(inplace)
(7): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(8): ReLU(inplace)
(9): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
(10): Conv2d(128, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(11): ReLU(inplace)
(12): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(13): ReLU(inplace)
(14): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(15): ReLU(inplace)
(16): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=True)
(17): Conv2d(256, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(18): ReLU(inplace)
(19): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(20): ReLU(inplace)
(21): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(22): ReLU(inplace)
(23): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
(24): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(25): ReLU(inplace)
(26): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(27): ReLU(inplace)
(28): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(29): ReLU(inplace)
(30): MaxPool2d(kernel_size=3, stride=1, padding=1, dilation=1, ceil_mode=False)
(31): Conv2d(512, 1024, kernel_size=(3, 3), stride=(1, 1), padding=(6, 6), dilation=(6, 6))
(32): ReLU(inplace)
(33): Conv2d(1024, 1024, kernel_size=(1, 1), stride=(1, 1))
(34): ReLU(inplace)
)
(extras): ModuleList(
(0): Sequential(
(0): Conv2d(1024, 256, kernel_size=(1, 1), stride=(1, 1))
(1): ReLU()
(2): Conv2d(256, 512, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1))
(3): ReLU()
)
(1): Sequential(
(0): Conv2d(512, 128, kernel_size=(1, 1), stride=(1, 1))
(1): ReLU()
(2): Conv2d(128, 256, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1))
(3): ReLU()
)
(2): Sequential(
(0): Conv2d(256, 128, kernel_size=(1, 1), stride=(1, 1))
(1): ReLU()
(2): Conv2d(128, 256, kernel_size=(3, 3), stride=(1, 1))
(3): ReLU()
)
(3): Sequential(
(0): Conv2d(256, 128, kernel_size=(1, 1), stride=(1, 1))
(1): ReLU()
(2): Conv2d(128, 256, kernel_size=(3, 3), stride=(1, 1))
(3): ReLU()
)
)
)
VGG16原始的
(30): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
SSD改装VGG16的
(30): MaxPool2d(kernel_size=3, stride=1, padding=1, dilation=1, ceil_mode=False)
分类 20+1=21 ( 4, 6, 6, 6, 4, 4)
(0): Conv2d(512, 84, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(1): Conv2d(1024, 126, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(2): Conv2d(512, 126, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(3): Conv2d(256, 126, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(4): Conv2d(256, 84, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(5): Conv2d(256, 84, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
位置( 4, 6, 6, 6, 4, 4)每个都乘以4(cx,cy,w,h)
(0): Conv2d(512, 16, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(1): Conv2d(1024, 24, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(2): Conv2d(512, 24, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(3): Conv2d(256, 24, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(4): Conv2d(256, 16, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(5): Conv2d(256, 16, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











