






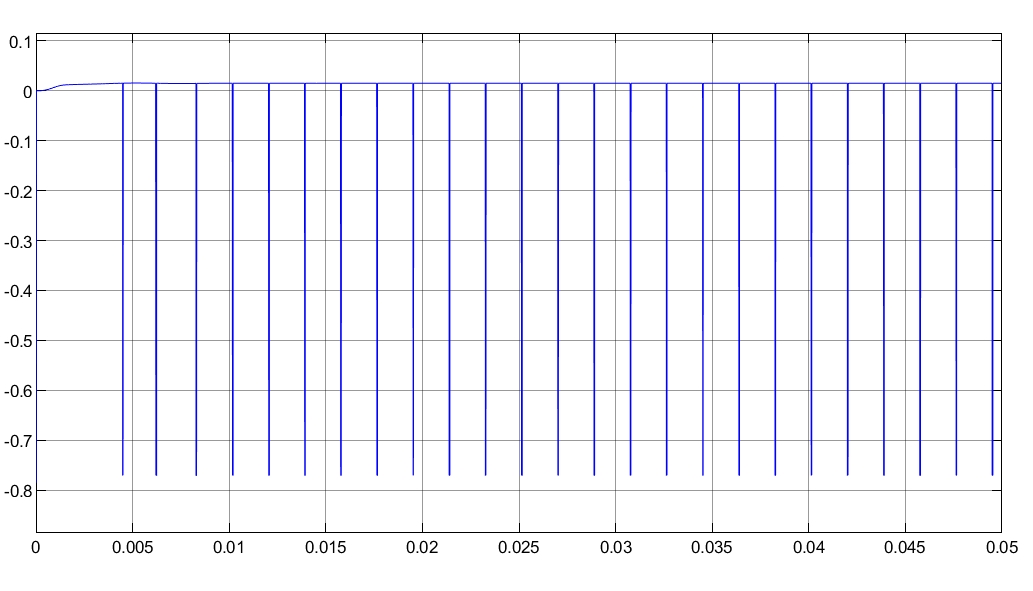
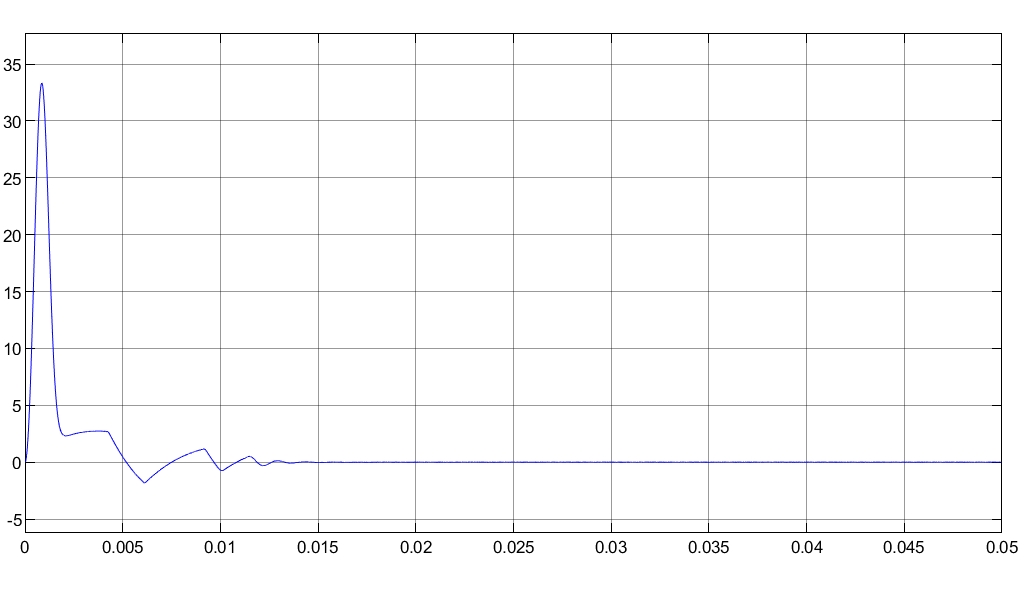
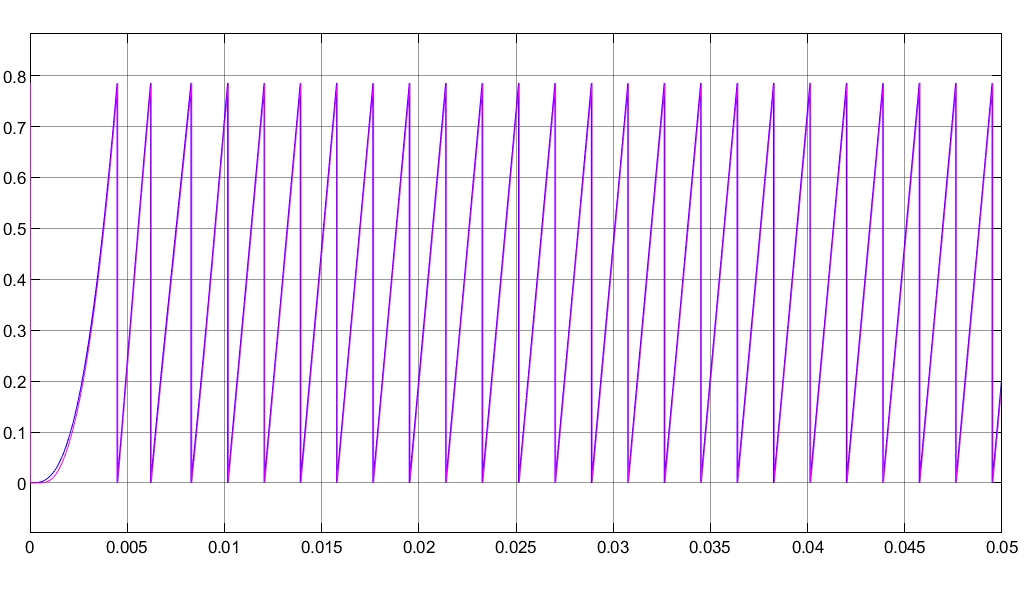
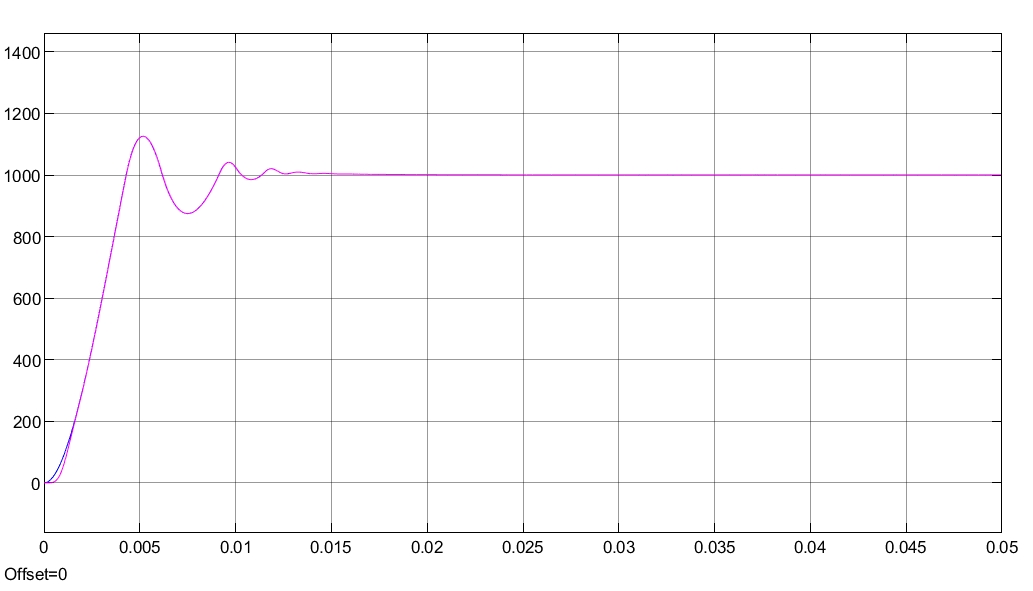
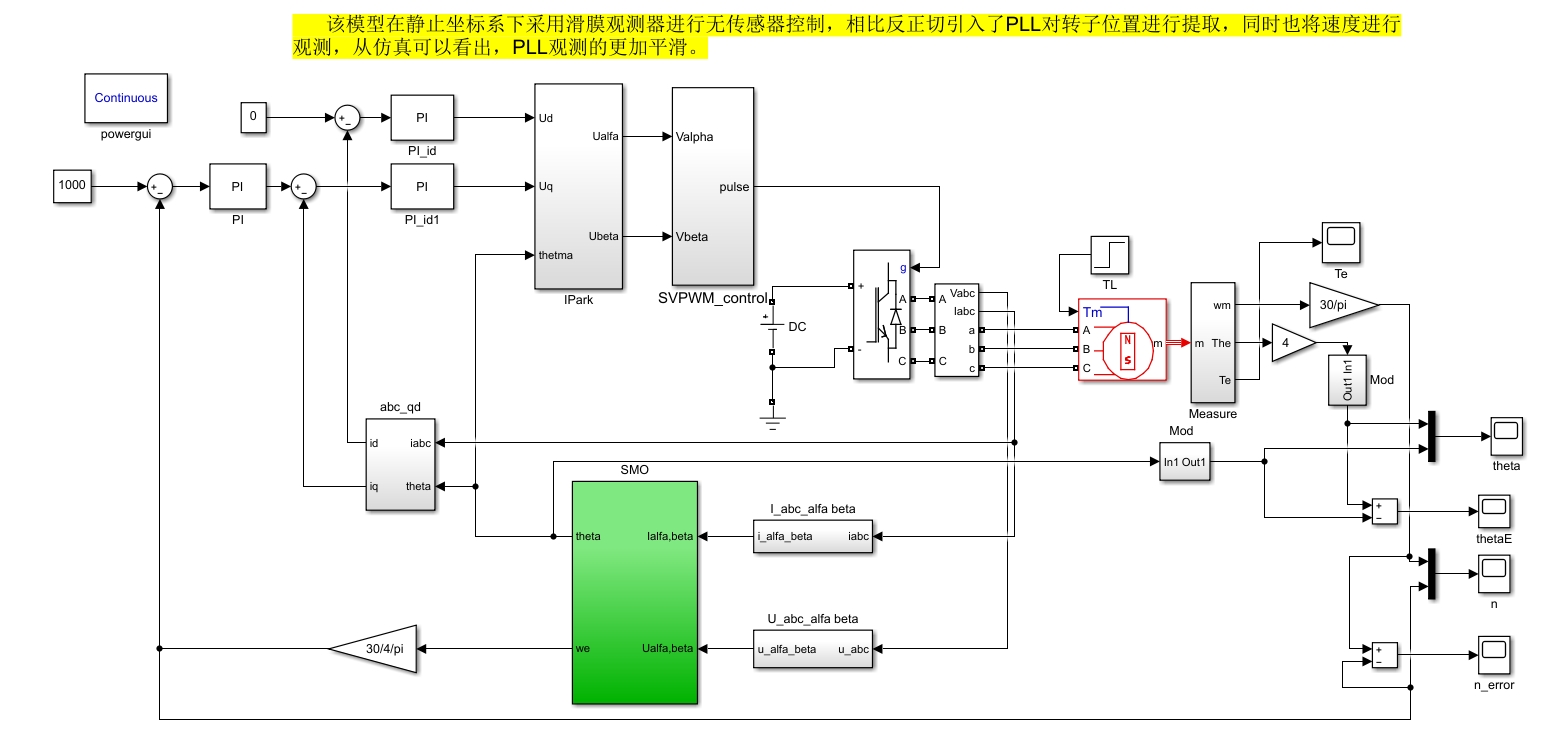
该模型在静止坐标系下采用滑膜观测器进行无传感器控制,相比反正切引入了PLL对转子位置进行提取,同时也将速度进行观测,从仿真可以看出,PLL观测的更加平滑。
ID:8788669889797797
Keepmoving
标题:基于滑膜观测器的无传感器控制引入PLL提取转子位置及观测速度
摘要: 本文介绍了一种基于滑膜观测器的无传感器控制方法,该方法引入了相位锁定环路(PLL)来提取转子位置,并实现了速度观测。通过对该方法的仿真分析,我们发现,相比于传统的反正切方法,PLL观测的转子位置更加平滑,具有更好的性能。
引言
无传感器控制是一种在技术领域中非常重要的控制方法。传统的传感器控制方法需要依靠传感器设备对转子位置和速度进行准确测量,但是传感器设备的成本和复杂性往往限制了其应用范围。为了解决这个问题,本文提出了一种基于滑膜观测器的无传感器控制方法,并引入了相位锁定环路来提取转子位置,同时实现速度观测。本文将对该方法进行详细介绍,并通过仿真实验验证其性能。
方法
-
滑膜观测器的原理
滑膜观测器是一种无传感器控制方法,其主要原理是通过建立一个与系统动力学相关的模型来估计系统的状态。该模型在静止坐标系下进行操作,可以通过观测系统输出和参考模型输出之间的误差,来实现对系统状态的估计。 -
PLL在无传感器控制中的应用
为了进一步提高转子位置的提取精度,本文引入了相位锁定环路(PLL)。PLL是一种常用的数字信号处理技术,其主要作用是通过锁定输入信号的相位,来提取信号的频率和相位信息。在本文的方法中,通过把转子位置信号作为PLL的输入信号,我们可以实现对转子位置的准确提取。
实验与结果
通过对该方法的仿真实验,我们可以得到以下结论:
- 与传统的反正切方法相比,引入PLL的方法可以提高转子位置提取的准确性和平滑性,从而提高控制系统的性能。
- 通过观测速度,在无传感器控制中可以更好地了解系统动态特性,为控制系统的设计和优化提供更多的信息。
结论
本文介绍了一种基于滑膜观测器的无传感器控制方法,并引入相位锁定环路来提取转子位置及观测速度。通过仿真实验,我们验证了该方法相比传统的反正切方法具有更好的性能,转子位置提取更加平滑。该方法在无传感器控制领域具有重要的应用价值,可以降低成本并提高控制系统的性能。
致谢
感谢社区对本文的关注和支持。
参考文献
本文不提供参考文献。
相关的代码,程序地址如下:http://wekup.cn/669889797797.html
















 322
322

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









