






1.HashMap底层数据结构
jdk1.7: 数组 + 链表
jdk1.8: 数组 + 链表 + 红黑树
根据源码可知: 数组默认初始长度为16

链表转为红黑树条件: 数组长度64,链表长度为8

红黑树退化为链表: 当链表长度为6(避免因在8附近导致链表/红黑树频繁转化)
2.头插法与尾插法
在向hashMap中存数据的过程中,底层实际是将数据存到数组上,经过如下步骤计算:
如图: 先拿到key的hashcode(共32位),将前16位与后16位进行异或(^)运算,得到hash值
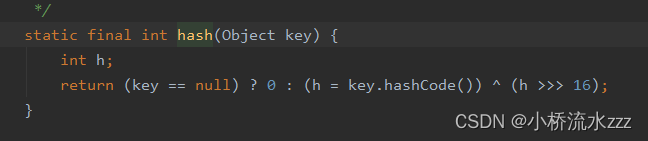
再用数组长度-1 和hash 做 位与(&)运算,得到最终数组下标,然后存入.hash函数,也叫扰动函数.
减少数据存放发生hash冲突的概率.

当发生hash冲突时,会生成单向链表.插入方式有头插法和尾插法.
jdk1.7用的是头插法,会存在链表发生反转,多线程环境下可能产生死循环(环形链表)
jdk1.8改良为尾插法,解决了链表反转和多线程环境死循环问题,但存在多线程环境数据覆盖问题

3.底层扩容相关机制
初始数组长度为16,加载因子为0.75(减少hash冲突)
扩容为原先长度*2,数组长度上线为2的30次幂(位运算是1<<30)

1.8的条件是> 数组长度* 加载因子

如果数组进行扩容,数组长度发生变化,而存储位置 index = h&(length-1),index也可能会发生变化,需要重新计算index。
HashMap的数组长度一定保持2的次幂,比如16的二进制表示为 10000,那么length-1就是15,二进制为01111,同理扩容后的数组长度为32,二进制表示为100000,length-1为31,二进制表示为011111。从下图可以我们也能看到这样会保证低位全为1,而扩容后只有一位差异,也就是多出了最左位的1,这样在通过 h&(length-1)的时候,只要h对应的最左边的那一个差异位为0,就能保证得到的新的数组索引和老数组索引一致(大大减少了之前已经散列良好的老数组的数据位置重新调换),这也是为啥数组长度必须是2的幂次原因之一。
另外,数组长度必须是2的幂次的另一原因就是能保证数据分布的均匀性。
JDK1.8中将transfer()方法的操作也放入了resize()方法中,而由于JDK1.8引入了红黑树的结构,扩容的操作看起来也更加复杂。
/**
* Initializes or doubles table size. If null, allocates in
* accord with initial capacity target held in field threshold.
* Otherwise, because we are using power-of-two expansion, the
* elements from each bin must either stay at same index, or move
* with a power of two offset in the new table.
*
* @return the table
*/
final Node<K,V>[] resize() {
Node<K,V>[] oldTab = table;
int oldCap = (oldTab == null) ? 0 : oldTab.length;
int oldThr = threshold;
int newCap, newThr = 0;
if (oldCap > 0) {
if (oldCap >= MAXIMUM_CAPACITY) {
threshold = Integer.MAX_VALUE;
return oldTab;
}
else if ((newCap = oldCap << 1) < MAXIMUM_CAPACITY &&
oldCap >= DEFAULT_INITIAL_CAPACITY)
newThr = oldThr << 1; // double threshold
}
else if (oldThr > 0) // initial capacity was placed in threshold
newCap = oldThr;
else { // zero initial threshold signifies using defaults
newCap = DEFAULT_INITIAL_CAPACITY;
newThr = (int)(DEFAULT_LOAD_FACTOR * DEFAULT_INITIAL_CAPACITY);
}
if (newThr == 0) {
float ft = (float)newCap * loadFactor;
newThr = (newCap < MAXIMUM_CAPACITY && ft < (float)MAXIMUM_CAPACITY ?
(int)ft : Integer.MAX_VALUE);
}
threshold = newThr;
// 新建数组
@SuppressWarnings({"rawtypes","unchecked"})
Node<K,V>[] newTab = (Node<K,V>[])new Node[newCap];
table = newTab;
if (oldTab != null) {
// 数据转移操作
for (int j = 0; j < oldCap; ++j) {
Node<K,V> e;
if ((e = oldTab[j]) != null) {
oldTab[j] = null;
// 元素没有后续节点,直接放入新数组对应索引位置
if (e.next == null)
newTab[e.hash & (newCap - 1)] = e;
// 元素是树节点,进行树转移操作(本文暂不考虑)
else if (e instanceof TreeNode)
((TreeNode<K,V>)e).split(this, newTab, j, oldCap);
else { // preserve order
// 不是树节点并且有后续节点那就只剩下链表形式了
Node<K,V> loHead = null, loTail = null;
Node<K,V> hiHead = null, hiTail = null;
Node<K,V> next;
// 尾插法转移链表数据
do {
next = e.next;
// 索引不进行变化,放入新数组和原数组一样的位置
if ((e.hash & oldCap) == 0) {
if (loTail == null)
// 直接放入
loHead = e;
else
// 尾插法
loTail.next = e;
loTail = e;
}
else {
// 需要重新计算元素在新数组中的位置
if (hiTail == null)
// 直接放入
hiHead = e;
else
// 尾插法
hiTail.next = e;
hiTail = e;
}
} while ((e = next) != null);
if (loTail != null) {
loTail.next = null;
newTab[j] = loHead;
}
if (hiTail != null) {
// 重新计算的数组索引位置也就是原索引加上原数组长度
hiTail.next = null;
newTab[j + oldCap] = hiHead;
}
}
}
}
}
return newTab;
}
4.concurrentHashMap
上面说到,jdk1.8虽然解决了链表反转和死循环问题,但是依然存在多线程环境数据覆盖的问题.
使用线程安全的 Hashtable 类代替,该类在对数据操作的时候都会上锁,也就是加上 synchronized
使用线程安全的 ConcurrentHashMap 类代替,该类在 JDK 1.7 和 JDK 1.8 的底层原理有所不同,JDK 1.7 采用数组 + 链表存储数据,使用分段锁 Segment 保证线程安全;JDK 1.8 采用数组 + 链表/红黑树存储数据,使用 CAS + synchronized 保证线程安全。
不过**前两者的线程并发度并不高,容易发生大规模阻塞,**所以一般使用的都是 ConcurrentHashMap,他的性能和效率明显高于前者。
ConcurrentHashMap1.7
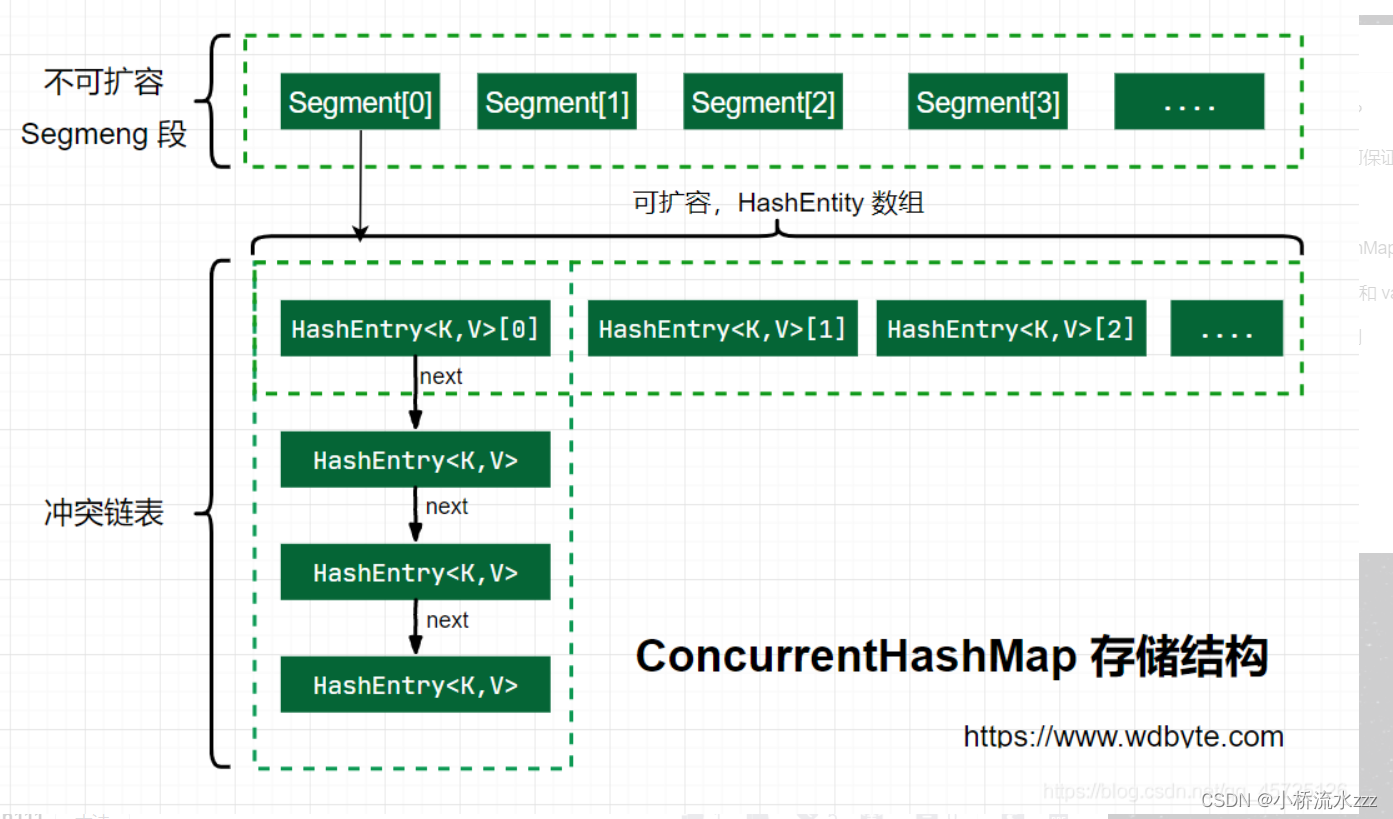
Java 7 中 ConcurrentHashMap 的存储结构如上图,ConcurrnetHashMap 由很多个 Segment 组合,而每一个 Segment 是一个类似于 HashMap 的结构,所以每一个 HashMap 的内部可以进行扩容。但是 Segment 的个数一旦初始化就不能改变,默认 Segment 的个数是 16 个,你也可以认为 ConcurrentHashMap 默认支持最多 16 个线程并发。
JDK1.8 ConcurrentHashMap在性能方面的优化
-
在jdk1.8里面ConcurrentHashMap锁的粒度,是数组中的某一个节点,而在jdk1.7里面。它锁定的是Segment,锁的范围要更大,所以性能上它会更低。
-
引入红黑树这样一个机制,去降低了数据查询的时间复杂度,红黑树的时间复杂度实是O(logn)
-
底层数据结构:Synchronized + CAS +Node +红黑树.Node的val和next都用volatile保证,保证可见性,查找,替换,赋值操作都使用CAS
为什么在有Synchronized 的情况下还要使用CAS?
因为CAS是乐观锁,在一些场景中(并发不激烈的情况下)它比Synchronized和ReentrentLock的效率要高,当CAS保障不了线程安全的情况下(扩容或者hash冲突的情况下)转成Synchronized 来保证线程安全,大大提高了低并发下的性能.














 805
805











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









