









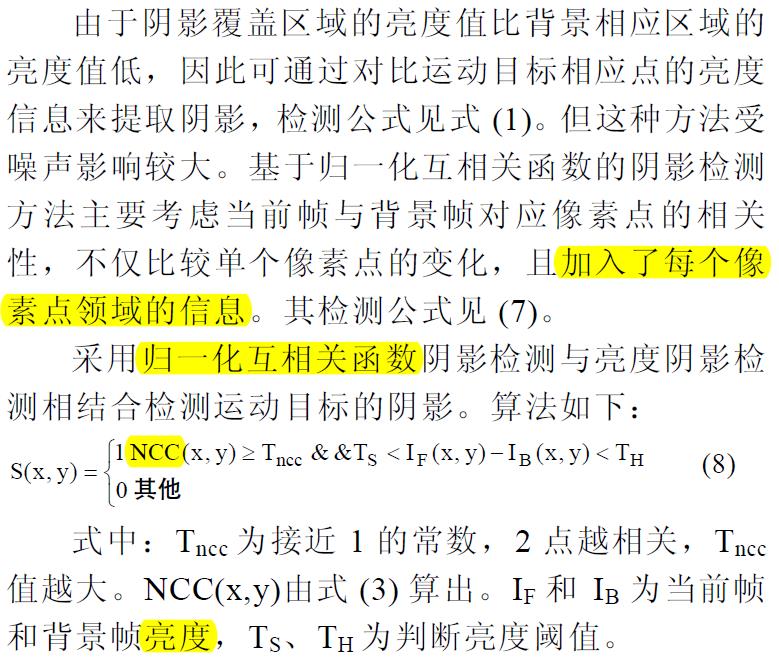
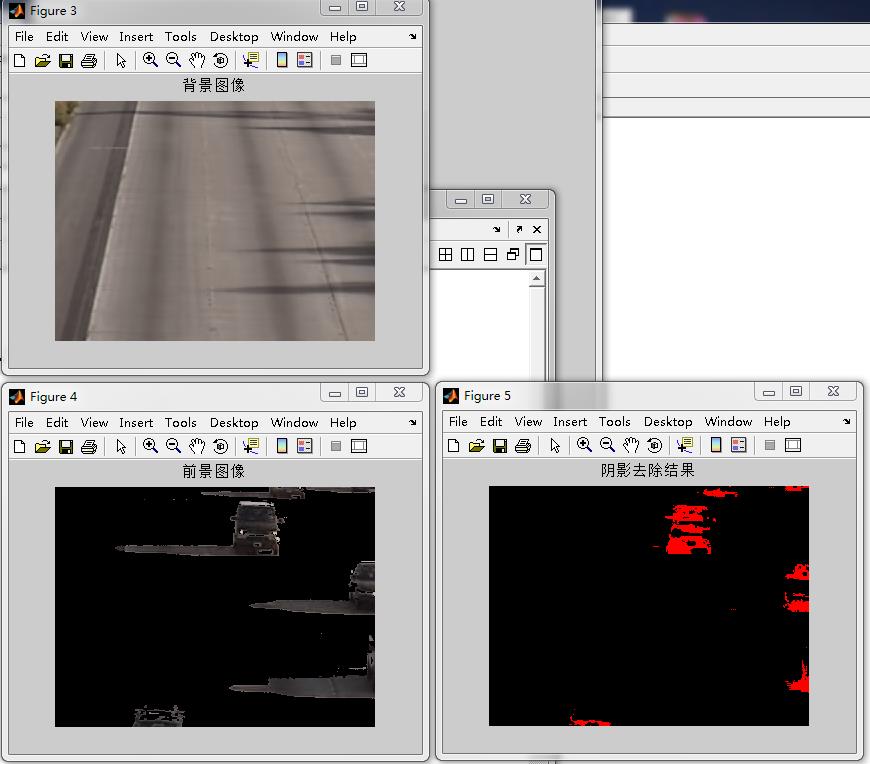
用GMM提取运动目标,在光照比较强烈的条件下,会把阴影也当成运动目标提取出来。 利用阴影亮度降低而色度基本不变的特点,在HSV空间里利用以下公式进行判断
#include "stdafx.h"
#include "cv.h"
#include "highgui.h"
#include <opencv2/opencv.hpp>
#include "HaarDetect.h"
#include "io.h"
#include "direct.h" /*mkdir("E:\mydir");*/
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include <assert.h>
#include <math.h>
#include <float.h>
#include <limits.h>
#include <time.h>
#include <ctype.h>
#ifdef _EiC
#define WIN32
#endif
// shade1.cpp : Defines the entry point for the console application.
//
// shade.cpp : Defines the entry point for the console application.
//
//视频检测
//#include "stdafx.h"
#include "stdio.h"
#include <stdlib.h>
#include "cv.h"
#include "highgui.h"
#include "math.h"
//#pragma comment( lib, "cv200.lib" )
//#pragma comment( lib, "cxcore200.lib" )
//#pragma comment( lib, "highgui200.lib" )
//#pragma comment( lib, "cvaux200.lib" )
/*void labeling(IplImage *src,IplImage* dst)
{
CvMemStorage* storage=0;
storage = cvCreateMemStorage(0);
CvSeq* contour = 0;
cvCopy(src,dst,0);
cvFindContours(dst,storage,&contour,sizeof(CvContour),
CV_RETR_EXTERNAL,CV_CHAIN_APPROX_SIMPLE);
int num = 0;
for (;contour!=0;contour=contour->h_next)
{
CvRect rect;
rect = cvBoundingRect(contour,0);
num++;
if (rect.height + rect.width>=50)
{
cvRectangle(src,cvPoint(rect.x,rect.y),cvPoint(rect.x+rect.width,rect.y+rect.height),
CV_RGB(255,255,255),1,8);
}
}
}*/
void ShadeDetect(IplImage *currImg, IplImage *bkImg/*, IplImage *shdadeImg*//*,double th1,double th2,double th3,double th4*/)
{
//cvZero(shdadeImg);
//cvNot(shdadeImg,shdadeImg);
//unsigned char* currData;
//unsigned char* bkData;
//unsigned char* shadeData;
//int i=0,j=0;
//int height=currImg->height;
//int width=currImg->width;
//double rb=0,gb=0,Ib=0,Rb=0,Gb=0,Bb=0,bf=0;
//double rt=0,gt=0,It=0,Rt=0,Gt=0,Bt=0,tf=0;
////CvScalar cs=cvScalarAll(255);
//for (i=0;i<height;i++)
//{
// currData=(unsigned char*)currImg->imageData+i*currImg->widthStep;
// bkData=(unsigned char*)bkImg->imageData+i*bkImg->widthStep;
// shadeData=(unsigned char*)shdadeImg->imageData+i*shdadeImg->widthStep;
// for (j=0;j<width;j++)
// {
// // current normalized
// Rt=currData[j*3];
// Gt=currData[j*3+1];
// Bt=currData[j*3+2];
// tf=(Rt>Gt?Gt:Rt)>Bt?Bt:(Rt>Gt?Gt:Rt);
// rt=acos((0.5*((Rt-Gt)+(Rt-Bt)))/(sqrt((Rt-Gt)*(Rt-Gt)+(Rt-Bt)*(Rt-Gt))));
// gt=1-3*tf/(Rt+Gt+Bt);
// It=(Rt+Gt+Bt)/3;
// // Bk normalized
// Rb=bkData[j*3];
// Gb=bkData[j*3+1];
// Bb=bkData[j*3+2];
// bf=(Rb>Gb?Gb:Rb)>Bb?Bb:(Rb>Gb?Gb:Rb);
// rb=acos((0.5*((Rb-Gb)+(Rb-Bb)))/(sqrt((Rb-Gb)*(Rb-Gb)+(Rb-Bb)*(Rb-Gb))));
// gb=1-3*bf/(Rb+Gb+Bb);
// Ib=(Rb+Gb+Bb)/3;
// // judge whether is shadeimg
// if (It/Ib>=th1&& It/Ib<=th2 && fabs(rt-rb)<=th3 && fabs(gt-gb)<=th4)
// {
// shadeData[j]=0;
// }
// }
//}
}
int main(int argc, char* argv[])
{
//声明IplImage指针
IplImage* pFrame = NULL;
IplImage* pFrame18 = NULL;
IplImage* Iavg = NULL;
IplImage* pBkImg = NULL;
IplImage* pFrImg = NULL;
int avg1[240][320]={0};
int avg2[240][320]={0};
int avg3[240][320]={0};
/////////////////////////////////////////////////////////////////////////////////////////////
IplImage* pRetImg = NULL;
IplImage* pFkHsv = NULL;
//IplImage* pFrImg = NULL;
IplImage* pFrImgGray = NULL;
IplImage* pFrImgR = NULL;
IplImage* pFrImgG = NULL;
IplImage* pFrImgB = NULL;
IplImage* pBkHsv = NULL;
//IplImage* pBkImg = NULL;
IplImage* pBkImgR = NULL;
IplImage* pBkImgG = NULL;
IplImage* pBkImgB = NULL;
//IplImage* pBkImg1 = NULL;
//IplImage* shadeImg = NULL;
//IplImage* dst=NULL;
CvMat* pFrameMatGray = NULL;
CvMat* pFrameMatR = NULL;
CvMat* pFrameMatG = NULL;
CvMat* pFrameMatB = NULL;
CvMat* pFrMatGray = NULL;
CvMat* pFrMatR = NULL;
CvMat* pFrMatG = NULL;
CvMat* pFrMatB = NULL;
CvMat* pBkMatGray = NULL;
CvMat* pBkMatR = NULL;
CvMat* pBkMatG = NULL;
CvMat* pBkMatB = NULL;
//void labeling(IplImage *src,IplImage* dst);
//CvMat* pBkMattmp = NULL;
CvCapture* pCapture = NULL;
double nFrmNum = 0.;
//创建窗口
cvNamedWindow("video", 1);
cvNamedWindow("background",1);
cvNamedWindow("foreground0",1);
cvNamedWindow("foreground",1);
//cvNamedWindow("shade", 1);
//使窗口有序排列
cvMoveWindow("video", 30, 0);
cvMoveWindow("background", 360, 120);
cvMoveWindow("foreground", 690, 240);
if( !(pCapture = cvCreateFileCapture("E:\\video\\高速公路 汽车阴影.AVI")))
{
printf("不能打开视频文件!\n");
return -1;
}
pFrame18 = cvQueryFrame( pCapture );
pFrame = cvQueryFrame( pCapture );
CvSize sz=cvGetSize(pFrame);
Iavg=cvCreateImage(cvGetSize(pFrame),IPL_DEPTH_16U,3);
//int step = pFrame->widthStep/sizeof(uchar);
// for (int i=0;i<pFrame->height;i++)
// {
// for (int j=0;j<pFrame->width;j++)
// {
// Iavg->imageData[i*step+j*3+0]=0;
// Iavg->imageData[i*step+j*3+1]=0;
// Iavg->imageData[i*step+j*3+2]=0;
// }
// }
pBkImg = cvCreateImage(cvSize(pFrame->width, pFrame->height), IPL_DEPTH_8U,3);
pFrImg = cvCreateImage(cvSize(pFrame->width, pFrame->height), IPL_DEPTH_8U,3);
pRetImg = cvCreateImage(cvSize(pFrame->width, pFrame->height), IPL_DEPTH_8U,3);
pBkHsv = cvCreateImage(cvSize(pFrame->width, pFrame->height), IPL_DEPTH_8U,3);
//
pFkHsv = cvCreateImage(cvSize(pFrame->width, pFrame->height), IPL_DEPTH_8U,3);
//double* avg=(double*)malloc((pFrame->width*pFrame->height)*sizeof(double));
uchar* data=(uchar *)pFrame->imageData;
int step = pFrame->widthStep/sizeof(uchar);
int channels = pFrame->nChannels;
//逐帧读取视频
while(nFrmNum<=100)//获取视频帧,到结尾退出循环
{
pFrame = cvQueryFrame( pCapture );
nFrmNum++;
//char* s11=(char *)malloc(sizeof(char)*255);//
//strcpy(s11,"E:\\");
//strcat(s11,"\\");
//char s3[100];
//itoa(nFrmNum,s3,10); /*把a转到s中,10是十进制*/
//strcat(s11,s3);
//strcat(s11,".jpg");
//cvSaveImage(s11,pFrame);//保存图片
//free(s11);//
/*cvShowImage("pFrame", pFrame);
cvWaitKey(10);*/
//如果是第一帧,需要申请内存,并初始化
// if(nFrmNum == 1)
// {
///////////////////////////////////////////////////////////////////////////////////////
// pBkImgGray = cvCreateImage(cvSize(pFrame->width, pFrame->height), IPL_DEPTH_8U,1);
// pFrImgGray = cvCreateImage(cvSize(pFrame->width, pFrame->height), IPL_DEPTH_8U,1);
//
// pBkMatGray = cvCreateMat(pFrame->height, pFrame->width, CV_32FC1);
// pFrMatGray = cvCreateMat(pFrame->height, pFrame->width, CV_32FC1);
// pFrameMatGray = cvCreateMat(pFrame->height, pFrame->width, CV_32FC1);
// //转化成单通道图像再处理
// cvCvtColor(pFrame, pBkImgGray, CV_BGR2GRAY);
// cvCvtColor(pFrame, pFrImgGray, CV_BGR2GRAY);
//
// cvConvertScale(pFrImgGray, pFrameMatGray);
// cvConvertScale(pFrImgGray, pFrMatGray);
// cvConvertScale(pFrImgGray, pBkMatGray);
///////////////////////////////////////////////////////////////////////////////////////
//
// pRetImg = cvCreateImage(cvSize(pFrame->width, pFrame->height), IPL_DEPTH_8U,3);
//
//
// pBkImgR = cvCreateImage(cvSize(pFrame->width, pFrame->height), IPL_DEPTH_8U,1);
// pBkImgG = cvCreateImage(cvSize(pFrame->width, pFrame->height), IPL_DEPTH_8U,1);
// pBkImgB = cvCreateImage(cvSize(pFrame->width, pFrame->height), IPL_DEPTH_8U,1);
//
// pFkHsv = cvCreateImage(cvSize(pFrame->width, pFrame->height), IPL_DEPTH_8U,3);
//
// pFrImg = cvCreateImage(cvSize(pFrame->width, pFrame->height), IPL_DEPTH_8U,3);
//
// pFrImgR = cvCreateImage(cvSize(pFrame->width, pFrame->height), IPL_DEPTH_8U,1);
// pFrImgG = cvCreateImage(cvSize(pFrame->width, pFrame->height), IPL_DEPTH_8U,1);
// pFrImgB = cvCreateImage(cvSize(pFrame->width, pFrame->height), IPL_DEPTH_8U,1);
//
// //pBkImg1 = cvCreateImage(cvSize(pFrame->width, pFrame->height), IPL_DEPTH_8U,3);
// //shadeImg = cvCreateImage(cvSize(pFrame->width, pFrame->height), IPL_DEPTH_8U,1);
//
// pBkMatR = cvCreateMat(pFrame->height, pFrame->width, CV_32FC1);
// pBkMatG = cvCreateMat(pFrame->height, pFrame->width, CV_32FC1);
// pBkMatB = cvCreateMat(pFrame->height, pFrame->width, CV_32FC1);
// //pBkMattmp = cvCreateMat(pFrame->height, pFrame->width, CV_32FC1);
//
// pFrMatR = cvCreateMat(pFrame->height, pFrame->width, CV_32FC1);
// pFrMatG = cvCreateMat(pFrame->height, pFrame->width, CV_32FC1);
// pFrMatB = cvCreateMat(pFrame->height, pFrame->width, CV_32FC1);
//
// pFrameMatR = cvCreateMat(pFrame->height, pFrame->width, CV_32FC1);
// pFrameMatG = cvCreateMat(pFrame->height, pFrame->width, CV_32FC1);
// pFrameMatB = cvCreateMat(pFrame->height, pFrame->width, CV_32FC1);
//
// //转化成单通道图像再处理
// cvSplit(pFrame, pBkImgB, pBkImgG, pBkImgR, 0);//分离RGB通道,分别得到BGR的单通道图像
// //cvCvtColor(pFrame, pBkImg, CV_BGR2GRAY);
// cvSplit(pFrame, pFrImgB, pFrImgG, pFrImgR, 0);//分离RGB通道,分别得到BGR的单通道图像
// //cvCvtColor(pFrame, pFrImg, CV_BGR2GRAY);
//
// cvConvertScale(pFrImgR, pFrameMatR);
// cvConvertScale(pFrImgG, pFrameMatG);
// cvConvertScale(pFrImgB, pFrameMatB);
//
// cvConvertScale(pFrImgR, pBkMatR);
// cvConvertScale(pFrImgG, pBkMatG);
// cvConvertScale(pFrImgB, pBkMatB);
//
// cvConvertScale(pFrImgR, pFrMatR);
// cvConvertScale(pFrImgG, pFrMatG);
// cvConvertScale(pFrImgB, pFrMatB);
//
// //cvCopy(pFrame,pBkImg1,NULL);
// //cvConvertScale(pFrImg, pBkMattmp);
//
//
// }
// else
// {
// cvCvtColor(pFrame, pFrImgGray, CV_BGR2GRAY);
// cvConvertScale(pFrImgGray, pFrameMatGray);
// //高斯滤波先,以平滑图像
// cvSmooth(pFrameMatGray, pFrameMatGray, CV_GAUSSIAN, 3, 0, 0);
//
// //当前帧跟背景图相减
// cvAbsDiff(pFrameMatGray, pBkMatGray, pFrMatGray);
//
// //二值化前景图
// cvThreshold(pFrMatGray, pFrImgGray, 60, 255.0, CV_THRESH_BINARY);
//
// //进行形态学滤波,去掉噪音
// /*cvErode(pFrImgGray, pFrImgGray, 0, 1);
// cvDilate(pFrImgGray, pFrImgGray, 0, 1);*/
//
// //更新背景
// cvRunningAvg(pFrameMatGray, pBkMatGray, 0.003, 0);
// //将背景转化为图像格式,用以显示
// cvConvertScale(pBkMatGray, pBkImgGray);
//
// //显示图像
// //cvShowImage("pFrame", pFrame);
// cvShowImage("pBkImgGray", pBkImgGray);
// cvShowImage("pFrImgGray", pFrImgGray);
//
// //更新背景
// cvRunningAvg(pFrameMatGray, pBkMatGray, 0.003, 0);
// //将背景转化为图像格式,用以显示
// cvConvertScale(pBkMatGray, pBkImgGray);
//
//////////////////////////////////////////////////////////////////////////////////////////////
// cvSplit(pFrame, pFrImgB, pFrImgG, pFrImgR, 0);//分离RGB通道,分别得到BGR的单通道图像
// //cvCvtColor(pFrame, pFrImg, CV_BGR2GRAY);
//
// //cvCvtColor(pFrame, pFrImg, CV_BGR2HSV);
// cvConvertScale(pFrImgR, pFrameMatR);
// cvConvertScale(pFrImgG, pFrameMatG);
// cvConvertScale(pFrImgB, pFrameMatB);
//
// //当前帧跟背景图相减
// cvAbsDiff(pFrameMatR, pBkMatR, pFrMatR);
// cvAbsDiff(pFrameMatG, pBkMatG, pFrMatG);
// cvAbsDiff(pFrameMatB, pBkMatB, pFrMatB);
//
// //cvAbsDiff(pBkMat, pFrMat, pBkMattmp);//背景相消,需要足够多帧
// //cvOr(pBkMat, pBkMattmp, pBkMat);
// //高斯滤波先,以平滑图像
// //cvFlip(pFrMat,NULL,0);
// cvSmooth(pFrMatR, pFrMatR, CV_GAUSSIAN, 3,0,0);
// cvSmooth(pFrMatG, pFrMatG, CV_GAUSSIAN, 3,0,0);
// cvSmooth(pFrMatB, pFrMatB, CV_GAUSSIAN, 3,0,0);
//
// cvConvertScale(pFrMatR, pFrImgR);
// cvConvertScale(pFrMatG, pFrImgG);
// cvConvertScale(pFrMatB, pFrImgB);
// //二值化前景图
// //cvSmooth(pFrImg, pFrImg, CV_MEDIAN, 3,0,0);
// /*cvThreshold(pFrMatR, pFrImgR, 30, 255, CV_THRESH_BINARY);
// cvThreshold(pFrMatG, pFrImgG, 30, 255, CV_THRESH_BINARY);
// cvThreshold(pFrMatB, pFrImgB, 30, 255, CV_THRESH_BINARY);*/
//
// //进行形态学滤波,去掉噪音
// // cvErode(pFrImgR, pFrImgR, 0, 1);//腐蚀
// //cvErode(pFrImgG, pFrImgG, 0, 1);//腐蚀
// //cvErode(pFrImgB, pFrImgB, 0, 1);//腐蚀
//
// // cvDilate(pFrImgR, pFrImgR, 0, 1);//膨胀
// //cvDilate(pFrImgG, pFrImgG, 0, 1);//膨胀
// //cvDilate(pFrImgB, pFrImgB, 0, 1);//膨胀
//
// //更新背景
//
// //运动平滑(alpha参数:以多快的速度忘掉前面的帧)
// cvRunningAvg(pFrameMatR, pBkMatR, 0.003, 0);//0.005
// cvRunningAvg(pFrameMatG, pBkMatG, 0.003, 0);
// cvRunningAvg(pFrameMatB, pBkMatB, 0.003, 0);
// //将背景转化为图像格式,用以显示
//
// cvConvertScale(pBkMatR, pBkImgR);
// cvConvertScale(pBkMatG, pBkImgG);
// cvConvertScale(pBkMatB, pBkImgB);
// //cvConvertScale(pBkMat, pBkImg);
// //cvCvtColor(pBkImg, pBkImg1, CV_GRAY2BGR);
// //ShadeDetect(pFrame,pBkImg1,shadeImg,0.3,0.8,0.9,1);
// //显示图像
// //cvFlip(shadeImg,NULL,0);
//
// //cvFlip(pBkImg,NULL,0);
// //cvCopy(dst,pFrImg,0);
//
// cvMerge(pFrImgB, pFrImgG, pFrImgR, 0, pFrImg);//逆运算,将三通道图像融合得到彩色图像
// cvSaveImage("E:\\pFrImg.jpg",pFrImg);//保存图片
// cvCvtColor(pFrImg,pFkHsv,CV_BGR2HSV);//得到HSV图
// cvShowImage("foreground0", pFrImg);
//
// //cvAnd(pFrImg,shadeImg,pFrImg,NULL);
// //labeling(pFrImg,pFrImg);
// //cvErode(pFrImg, pFrImg, 0, 1);//腐蚀
// //cvDilate(pFrImg, pFrImg, 0, 1);//膨胀
//
// //cvShowImage("shade", shadeImg);
// //cvShowImage("video", pFrame);
//
// cvMerge(pBkImgB, pBkImgG, pBkImgR, 0, pBkImg);//逆运算,将三通道图像融合得到彩色图像
// cvSaveImage("E:\\pBkImg.jpg",pBkImg);//保存图片
// cvCvtColor(pBkImg,pBkHsv,CV_BGR2HSV);//得到HSV图
// cvShowImage("background", pBkImg);
// //cvShowImage("foreground", pFrImg);
// //如果有按键事件,则跳出循环
// //此等待也为cvShowImage函数提供时间完成显示
// //等待时间可以根据CPU速度调整
// if( cvWaitKey(50)>= 0)
// break;
///////////////<<<<<<<pFkHsv pBkHsv<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<
/* if(nFrmNum==10)
cvCopy(pFrame,pFrame18);*/
double a,b,c,d;
for (int i=0;i<pFrame->height;i++)
{
for (int j=0;j<pFrame->width;j++)
{
avg1[i][j]+=data[i*step+j*channels+0];
avg2[i][j]+=data[i*step+j*channels+1];
avg3[i][j]+=data[i*step+j*channels+2];
/*Iavg->imageData[i*step+j*3+0]+=pFrame->imageData[i*step+j*3+0];
Iavg->imageData[i*step+j*3+1]+=pFrame->imageData[i*step+j*3+1];
Iavg->imageData[i*step+j*3+2]+=pFrame->imageData[i*step+j*3+2]; */
}
}
//cvShowImage("pRetImg", pRetImg);
///////////////>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>
//ShadeDetect(pFkHsv,pBkHsv);
}
nFrmNum--;
int step2 = pFrame->widthStep/sizeof(uchar);
for (int i=0;i<pFrame->height;i++)
{
for (int j=0;j<pFrame->width;j++)
{
pBkImg->imageData[i*step2+j*3+0]=(uchar)(avg1[i][j]/nFrmNum);
pBkImg->imageData[i*step2+j*3+1]=(uchar)(avg2[i][j]/nFrmNum);
pBkImg->imageData[i*step2+j*3+2]=(uchar)(avg3[i][j]/nFrmNum);
}
}
cvShowImage("pBkImg", pBkImg);
//cvConvertScale(Iavg, pFrameMatGray);
//cvShowImage("pFrameMatGray", pFrameMatGray);
//等待时间可以根据CPU速度调整
cvWaitKey(50);
pFrame18 = cvLoadImage( "E:\\16.jpg", 1);
cvShowImage("pFrame18", pFrame18);
cvWaitKey(50);
data=(uchar *)pFrame18->imageData;
step = pFrame18->widthStep/sizeof(uchar);
channels = pFrame18->nChannels;
uchar* data2=(uchar *)pBkImg->imageData;
uchar* data3=(uchar *)pFrImg->imageData;
for (int i=0;i<pFrame18->height;i++)
{
for (int j=0;j<pFrame18->width;j++)
{
/*data3[i*step+j*channels+0]=
((abs(data[i*step+j*channels+0]-data2[i*step+j*channels+0])>=20) ? data[i*step+j*channels+0]:0);
data3[i*step+j*channels+1]=
((abs(data[i*step+j*channels+1]-data2[i*step+j*channels+1])>=20) ? data[i*step+j*channels+1]:0);
data3[i*step+j*channels+2]=
((abs(data[i*step+j*channels+2]-data2[i*step+j*channels+2])>=20) ? data[i*step+j*channels+2]:0);*/
if((abs(data[i*step+j*channels+0]-data2[i*step+j*channels+0])>=40)||
(abs(data[i*step+j*channels+1]-data2[i*step+j*channels+1])>=40)||
(abs(data[i*step+j*channels+2]-data2[i*step+j*channels+2])>=40))
{
data3[i*step+j*channels+0]=data[i*step+j*channels+0];
data3[i*step+j*channels+1]=data[i*step+j*channels+1];
data3[i*step+j*channels+2]=data[i*step+j*channels+2];
}
else
{
data3[i*step+j*channels+0]=0;
data3[i*step+j*channels+1]=0;
data3[i*step+j*channels+2]=0;
}
}
}
cvShowImage("pFrImg", pFrImg);
cvWaitKey(50);
///////////////////////////////////////////////////////////////////////////////////////////////////////
cvCvtColor(pBkImg, pBkHsv, CV_BGR2HSV);
cvCvtColor(pFrImg, pFkHsv, CV_BGR2HSV);
cvShowImage("pFkHsv", pFkHsv);
cvWaitKey(50);
step = pRetImg->widthStep/sizeof(uchar);
double a,b,c,d;
for (int i=0;i<pFkHsv->height;i++)
{
for (int j=0;j<pFkHsv->width;j++)
{
a=(double)(pFkHsv->imageData[i*step+j*3+2])/(pBkHsv->imageData[i*step+j*3+2]);
b=(double)(pFkHsv->imageData[i*step+j*3+2])/(pBkHsv->imageData[i*step+j*3+2]);
c=abs(pFkHsv->imageData[i*step+j*3+1]-pBkHsv->imageData[i*step+j*3+1]);
d=abs(pFkHsv->imageData[i*step+j*3+0]-pBkHsv->imageData[i*step+j*3+0]);
if (
(a<=0.35)&&(b>=0.05)&&
(c<=4*255)&&(d<=1*255)
)
{
pRetImg->imageData[i*step+j*3+0]=255;
pRetImg->imageData[i*step+j*3+1]=255;
pRetImg->imageData[i*step+j*3+2]=255;
}
else
{
pRetImg->imageData[i*step+j*3+0]=0;
pRetImg->imageData[i*step+j*3+1]=0;
pRetImg->imageData[i*step+j*3+2]=0;
}
}
}
cvShowImage("pRetImg", pRetImg);
//等待时间可以根据CPU速度调整
cvWaitKey(50);
//销毁窗口
cvDestroyWindow("video");
cvDestroyWindow("background");
cvDestroyWindow("foreground0");
cvDestroyWindow("foreground");
//cvReleaseImage(&shadeImg);
cvDestroyWindow("shade");
//释放图像和矩阵
cvReleaseImage(&pFrImg);
cvReleaseImage(&pBkImg);
//cvReleaseImage(&pBkImg1);
/*cvReleaseMat(&pFrameMat);
cvReleaseMat(&pFrMat);
cvReleaseMat(&pBkMat);*/
cvReleaseCapture(&pCapture);
return 0;
}















 2491
2491

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









